1
Изобретение- относится к станкостроению, в частности к промышленным работам.
По основному авт.св. N 571369 извес ген захват промышленного робота, выполненный в виде упругой ленты с концами,5 закрепленными на нап{швляющих, причем приводной элемент присоединен к среднему пере гибу ленты, а два крайних перегиба служат губками захвата.
Однако жесткое крепление концов ленты не позволяет регулировать захват в зависимости от размеров детали, что снижает его технические возможности.
Целью изобретения является расширение 15 технологических возможностей захвата.
Достигается она тем, что концы упругой ленты шарнирно соединены с направляющими.20
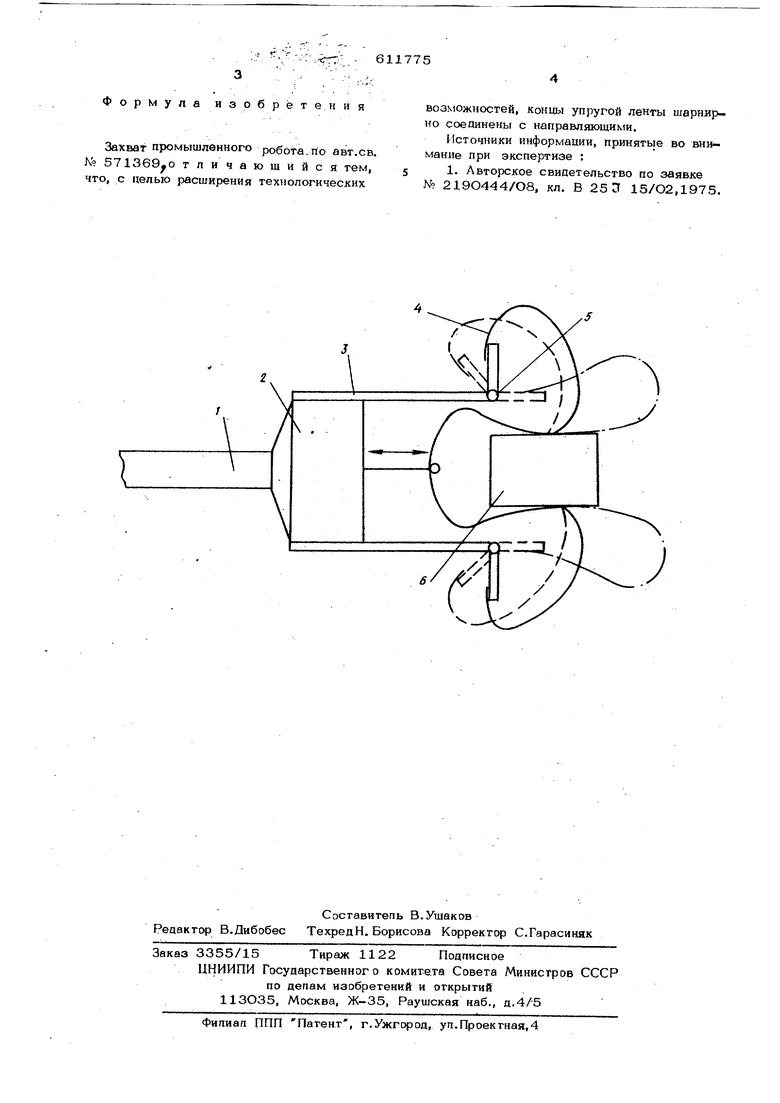
На чертеже изображен описываемый захват, общий вид.,
Захват, смонтированный на руке 1 проvfышлeннoгo робота, имеет приводной эле- 25
мент 2 поступательного действия, направляющие 3 упругукг ленту 4. Направляющие содержат зел5 фиксированного поворота, позволяКШИй концам ленты 4 поворачиваться во внешние стороны от направляющих при настройке на схватывание детали 6.
Предельные перемещения привода 2 вызывают деформацию упругой ленты 4, приводящую к появлению напряжений во внешних перегибах, стремящихся воздействовать на схваченную деталь 6. При, вт1{гивании штока привода увеличивается кривизна внешних перегибов ленты, что приводит к зажиму ох. ваченной детали 6. Губки возвращаются в исходное|состояние под действием сил упругости материала.
Настройка возвращающего усилия захвата происходит путем фиксированного поворо- та внешних перегибов ленты 4 относительно узла 5 фиксированного поворота. Возможные варианты поворота показаны на черте пунктиром.
Формула изобретения
Захват промышленного робота,по авт.св. № 571369 0 тличающийся тем, что, с целью расширения технологических
возможностей, концы упругой ленты шарнирно соединены с направляющими.
Источники информации, принятые во внимание при экспертизе ;
1. Авторское свидетельство по заявке № 2190444/08, кл. В 25 П 15/02,1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1981 |
|
SU971648A2 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Захват промышленного робота | 1978 |
|
SU768634A1 |
| Захват промышленного робота | 1979 |
|
SU844175A2 |
| Захват промышленного робота | 1983 |
|
SU1110628A2 |
| Захват промышленного робота | 1979 |
|
SU781056A2 |
| Захват | 1977 |
|
SU662343A1 |
| Захват промышленного робота | 1978 |
|
SU666074A2 |
| Схват промышленного робота | 1982 |
|
SU1033312A1 |
| Схват промышленного робота | 1978 |
|
SU716811A1 |
