Изобретение относится к робототехнике и может быть использовано для автоматизации монтажных, сборочных и упаковочных операций при производстве микросхем, модулей, реле и других изделий, имеющих калиброванные проволочные выводы в электронной, электротехнической и радиопромышленности.
Известен схват манипулятора, содержащий установленные с возможностью взаимного перемещения губки, в которых выполнены пазы одинаковой формы, причем пазы разных пластин образуют в парах захватные гнезда l.
Недостатком известного схвата является,,отсутствие возможности захвата деталей, имеющих проволочные выводы, не лежащие в одной плоскости.
Цель изобретения - обеспечение возможности захвата деталей, имеющих проволочные выводы.
Это достигается за счет того,что губк.и схвата выполнены в виде двух наложенных друг на друга пластин, причем, пазы в пластинах выполнены вытянутой.в направлении взаимного перемеш, пластин формы и имеют заострения с одного конца, при этом
ОСИ пар пазов лежат в параллельных плоскостях.
Кроме того, на пластинах могут быть выполнены выступы, примыкающие к заостренным концам пазов.
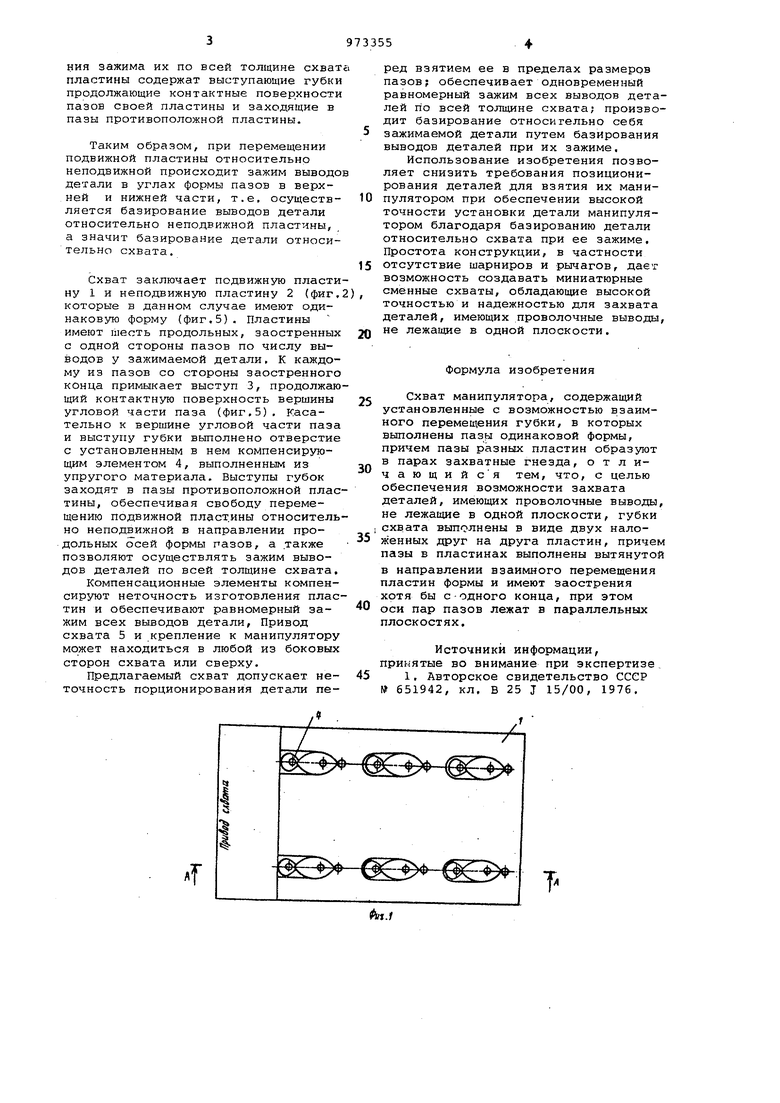
На фиг.1 изображен схват для зажима с шестью выводами в раскрытом состоянии, вид сверху; на фиг.2 разрез А-А на фиг.1; на фиг.З - то
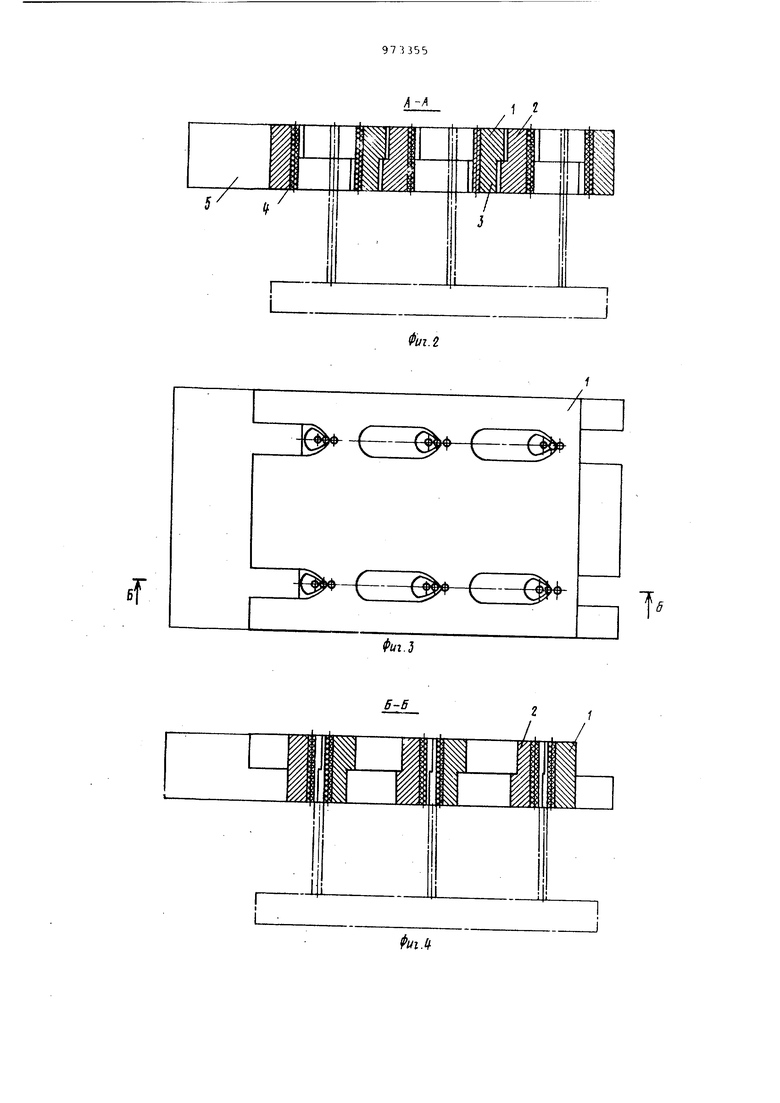
10 же, в закрытом состоянии; на фиг.4 разрез Б-Б на фиг.З; на фиг.З пластина схвата для детали с шестью выводами, в изометрии.
Схват представляет:собой две на15ложенные друг на друга пластины со сквозными пазами продолговатой формы по числу выводов зажимаемой детали. Одна из пластин может быть, в частности, неподвижной, а другая
20 обладает возможностью возвратно-поступательного перемещения в направлении продольных осей формы пазов. В раскрытом положении схвата пазы пластин частичйо совмещаются, обра25зуя сквозные отверстия листообразной формы. Расположение углОв формы пазов на пластине соответствует положению выводов зажимаемой детали. Для предотвращения срезающих нагру30зок на выводах детали и осуществления зажима их по всей толщине охвата плаотины содержат выступающие губки продолжающие контактные поверхности пазов своей пластины и заходящие в пазы противоположной пластины. Таким образом, при перемещении подвижной пластины относительно неподвижной происходит зажим выводов детали в углах формы пазов в верхней и нижней части, т.е. осуществляется базирование выводов детали относительно неподвижной пластины,. а значит базирование детали относительно охвата. Схват заключает подвижную пласти ну 1 и неподвижную пластину 2 (фиг, которые в данном случае имеют одинаковую форму (фиг,5). Пластины имеют шесть продольных, заостренных с одной стороны пазов по числу выводов у зажимаемой детали. К каждому из пазов со стороны заостренного конца примыкает выступ 3, продолжаю щий контактную поверхность вершины угловой части паза (фиг.5), Касательно к вершине угловой части паза и выступу губки выполнено отверстие с установленным в нем компенсирующим элементом 4, выполненным из упругого материала. Выступы губок заходят в пазы противоположной плас тины, обеспечивая свободу перемещению подвижной пласт.ины относитель но неподвижной в направлении про. дольных осей формы пазов, а также позволяют осуществлять зажим выводов деталей по всей толщине схвата Компенсационные элементы компенсируют неточность изготовления плас тин и обеспечивают равномерный зажим всех выводов детали, Привод схвата 5 и крепление к манипулятор может находиться в любой из боковы сторон схвата или сверху. Предлагаемый схват допускает не точность порционирования детали пе ед взятием ее в пределах размеров азов обеспечивает одновременный авномерный зажим всех выводов детаей по всей толщине схвата; произвоит базирование относительно себя зажимаемой детали путем базирования выводов деталей при их зажиме. Использование изобретения позволяет снизить требования позиционирования деталей для взятия их манипулятором при обеспечении высокой точности установки детали манипулятором благодаря базированию детали относительно схвата при ее зажиме, Простота конструкции, в частности отсутствие шарниров и рычагов, дает возможность создавать миниатюрные сменные схваты, обладающие высокой точностью и надежностью для захвата деталей, имеющих проволочные выводы, не лежащие в одной плоскости. Формула изобретения Схват манипулятора, содержащий установленные с возможностью взаимного перемещения губки, в которых выполнены пазы одинаковой формы, причем пазы разных пластин образуют в парах захватные гнезда, о т л ичающийся тем, что, с целью обеспечения возможности захвата деталей, имеющих проволочные выводы, не лежащие в одной плоскости, губки , схвата выполнены в виде двух наложенных друг на друга пластин, причем пазы в пластинах выполнены вытянутой в направлении взаимного перемещения пластин формы и имеют заострения хотя бы с одного конца, при этом оси пар пазов лежат s параллельных плоскостях. Источники информации, принятые во внимание при экспертизе 1 Авторское свидетельство СССР № 651942, кл, В 25 J 15/00, 1976.
И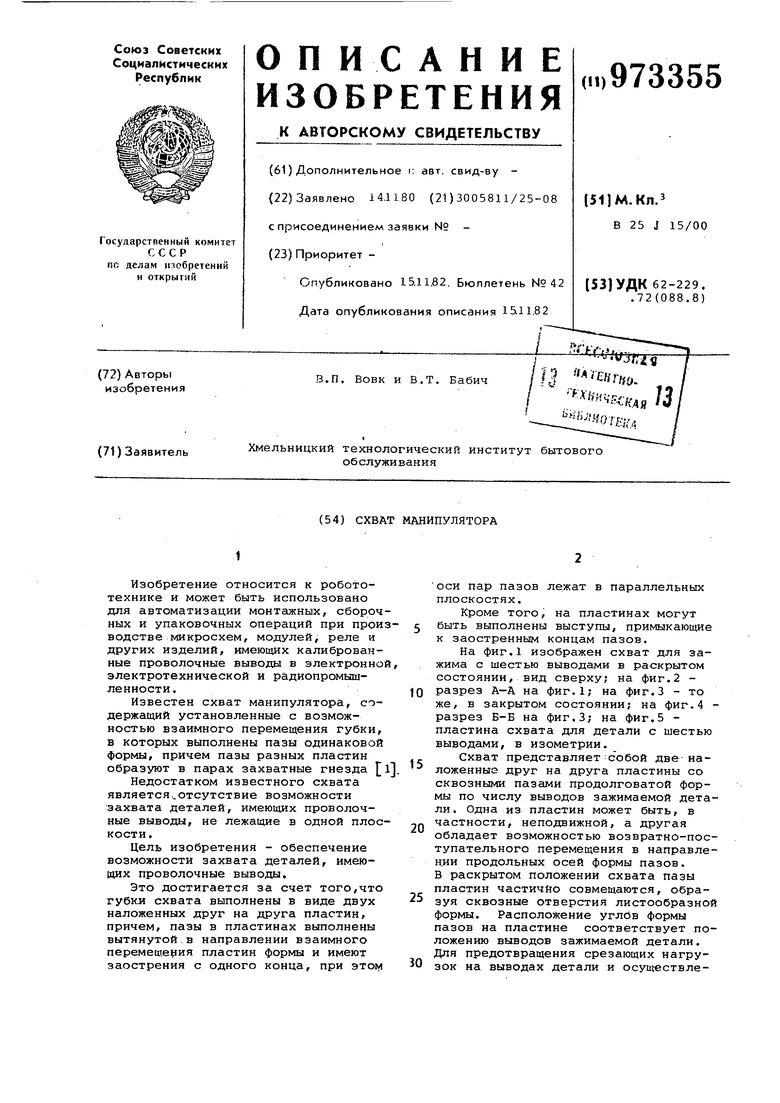
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1349969A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Устройство для изготовления и запрессовки проволочных штырей в изделие | 1989 |
|
SU1646661A1 |
| Схват | 1984 |
|
SU1180267A1 |
| Цанговый патрон | 1991 |
|
SU1814997A1 |
| Устройство для дорнования отверстий труб | 1990 |
|
SU1738616A1 |
| Устройство для дорнования отверстий трубы | 1988 |
|
SU1602711A1 |
яГ
I
( С
-е
-г2/
:
i
I
LX
Ш
