Изобретение относится к транспортному машиностроению и может быть использовано для механизации погрузочно-разгрузоч- ных операций при внутрицеховой транспортировке изделий.
Целью изобретения является повышение 5 надежности работы устройства при перегрузке изделий.
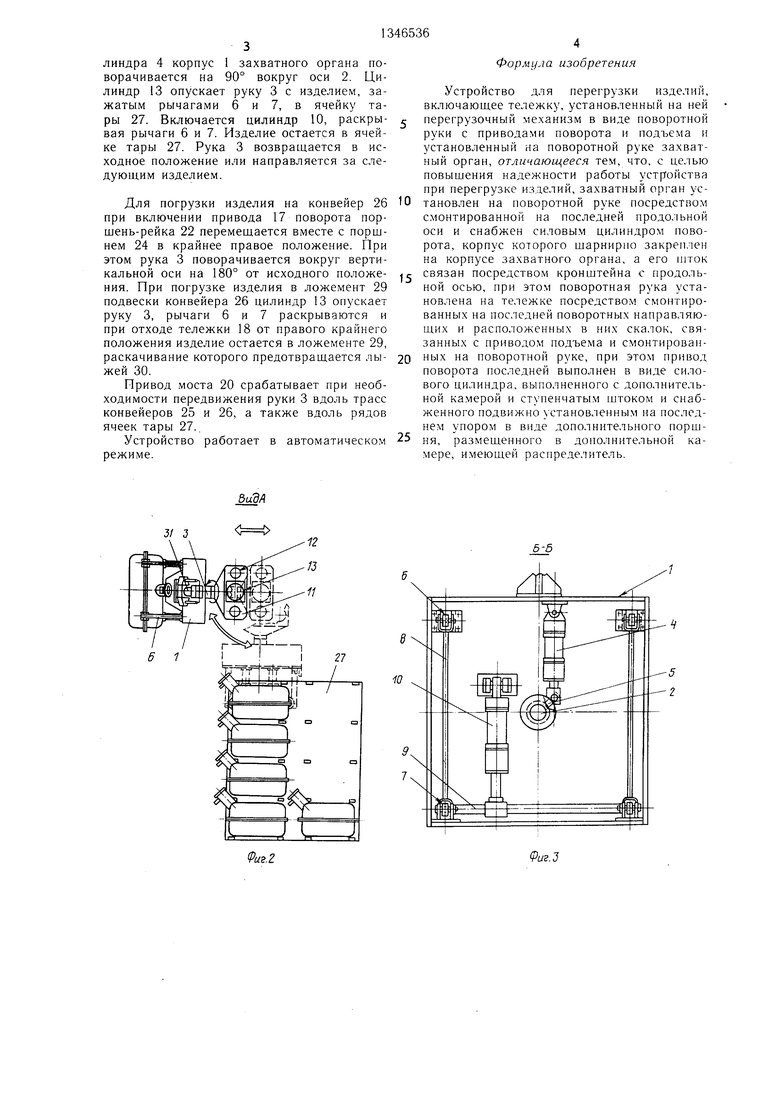
На фиг. показано устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1 (передняя крышка jo условно снята); на фиг. 4 - захватный орган; на фиг. 5 - сечение В-В на фиг. 1; на фиг. 6 - сечение Г-Г на фиг. 5; на фиг. 7 - подвеска с изделием в ложементе.
Устройство работает следующим образом.
Подвеска конвейера 25 своей осью симметрии останавливается против поворотной руки 3. Изделие петлей своей горловины надето на крюк 28 подвески конвейера 25. Срабатывает цилиндр 21 и рука 3 подъезжает к трассе конвейера 25. Включается цилиндр 10 (рычаги 6 и 7 захватывают изделие), а затем толкатель 31 извлекает крюк из петли изделия. Одновременно с толкателем 31 цилиндр 21 реверсирует, возвращая тележку 18 в исходное положение, если изделие необходимо уложить в первый ряд тары 27. Если изделие нужно уложить во второй ряд тары 27 или передать на конвейер 26, тележка 18 перемещается циУстройство содержит корпус 1 захватно- 15 линдром 21 в правое крайнее положение.
20
го органа, установленный на оси 2 поворотной руки 3 и шарнирно соединенный с силовым цилиндром 4 поворота, шток которого шарнирно соединен с кронштейном 5, зафиксированным на оси 2. На корпусе 1 установлены рычаги 6 и 7, соединенные тягами 8. При этом рычаги 7 соединены между собой осью 9, которую охватывает шарниром пток 10 силового цилиндра.
Поворотная рука 3 закреплена на пере- 25 кладине 11, смонтированной на скалках 12 и соединенной со штоком подъемно-опускного цилиндра 13, закрепленного на направляющих 14. Скалки 12 расположены в направляющих 14, лежаидих в поворотной опоре 15 и соединенных зубчатой передачей 16 30 с приводом 17 поворота. Опора 15 и привод 17 закреплепы в тележке 18, паправ- ляющие 19 которой установлены на мосту 20. Привод тележки 18 выполнен в виде силового цилиндра 21, закрепленного на мосту 20.
Привод 7 поворота содержит порщень- рейку 22 со штоком 23, выполненным ступенчатым, и подвижный упор в виде поршня 24, установленного в дополнительной камере. Поршень-рейка 22 связан с зубчатой передачей 16. Управление поршнем-рейкой 22 и поршнем 24 - от распределителей (не показаны).
Направляющие моста 20 параллельны трассам конвейеров 25 и 26. Когшейер 25 подает изделие к перегрузке, а конвейер 26 транспортирует изделие далее. Между трассами конвейеров 25 и 26 па полу устанавливается тара 27 для изделий, например топливных баков грузового автомобиля. Тара 27 представляет собой поддон со стойками. Конвейер1)1 могут транспортировать изделие либо на крюке 28 подвески, зацеп- лепном за петлю изделия, либо в ложементе 29 подвески (фиг. 7) в зависимости от технологических операций (например, окраска изделия требует подвешивания на крюк). Рядом с трассой конвейера 26 на уровне ложемента 29 закреплена лыжа 30. Для съема изделия с крюка 28 подвески на корпусе 1 захватного органа закреплен толкатель 31.
В крайних позициях устройство осуществляет съем и навеску изделий, а в промежуточной и в правой крайней позициях, где рука 3 устанавливается параллельно трассам конвейеров 25 и 26, - укладку изделий в тару 27. Во всех позициях точность фиксации обеспечивается конструкцией привода. Фиксация осуществляется давлением рабочей среды, например масла в гидросистеме, прижимающего порщень к упору.
В приводе 17 поворота фиксация в промежуточной позиции осуществляется при пр- .мощи подвижного упора в виде дополнительного поршня 24, диаметр которого боль- ще диаметра поршня-рейки 22. Движениями поршней 22 и 24 управляют распределители, от которых рабочая среда подводится во все полости цилиндра и отводится в бак. Каждым поршнем может управлять отдельный распределитель. Если в правую полость привода подать давление, поршень 24
35 становится слева, а поршень-рейка 22 благодаря разности площадей не может преодолеть усилия порщня 24 и ступенькой штока 23 будет упираться в поршень 24. Если давление в правой полости снять, пор- гнень-рейка 22 вместе с поршнем 24 переместится вправо. Если давление справа не снимать, а дать давление в среднюю полость, убрав давление в левой полости, пор- 1пень-рейка 22 переместится влево, а упор останется на месте, ожидая возврата nopuj45 ня-рейки 22. Или, если снять давление справа, не препятствовать переходу поршня-рейки 22 сразу в правое крайнее положение. Аналогично работает привод тележки 18 - цилиндр 21.
Для загрузки изделия в первый ряд та50 ры 27 поршень-рейка 22 (фиг. 6) из левого крайнего положения перемещается вправо до тех пор, пока шток 23 не будет останоз- лен поршнем 24, занимающим левое положение. Движение поршня-рейки 22 через зубчатую передачу 16 поворачивает направляющие 14 в опоре 15. Рука 3, скалки ко- 1 орой расположены в направляющих 14, поворачивается вокруг вертикальной оси опоры 15 на 90°. Затем срабатыванием ци40
55
Устройство работает следующим образом.
Подвеска конвейера 25 своей осью симметрии останавливается против поворотной руки 3. Изделие петлей своей горловины надето на крюк 28 подвески конвейера 25. Срабатывает цилиндр 21 и рука 3 подъезжает к трассе конвейера 25. Включается цилиндр 10 (рычаги 6 и 7 захватывают изделие), а затем толкатель 31 извлекает крюк из петли изделия. Одновременно с толкателем 31 цилиндр 21 реверсирует, возвращая тележку 18 в исходное положение, если изделие необходимо уложить в первый ряд тары 27. Если изделие нужно уложить во второй ряд тары 27 или передать на конвейер 26, тележка 18 перемещается цилиндром 21 в правое крайнее положение.
0
5 0
В крайних позициях устройство осуществляет съем и навеску изделий, а в промежуточной и в правой крайней позициях, где рука 3 устанавливается параллельно трассам конвейеров 25 и 26, - укладку изделий в тару 27. Во всех позициях точность фиксации обеспечивается конструкцией привода. Фиксация осуществляется давлением рабочей среды, например масла в гидросистеме, прижимающего порщень к упору.
В приводе 17 поворота фиксация в промежуточной позиции осуществляется при пр- .мощи подвижного упора в виде дополнительного поршня 24, диаметр которого боль- ще диаметра поршня-рейки 22. Движениями поршней 22 и 24 управляют распределители, от которых рабочая среда подводится во все полости цилиндра и отводится в бак. Каждым поршнем может управлять отдельный распределитель. Если в правую полость привода подать давление, поршень 24
5 становится слева, а поршень-рейка 22 благодаря разности площадей не может преодолеть усилия порщня 24 и ступенькой штока 23 будет упираться в поршень 24. Если давление в правой полости снять, пор- гнень-рейка 22 вместе с поршнем 24 переместится вправо. Если давление справа не снимать, а дать давление в среднюю полость, убрав давление в левой полости, пор- 1пень-рейка 22 переместится влево, а упор останется на месте, ожидая возврата nopuj5 ня-рейки 22. Или, если снять давление справа, не препятствовать переходу поршня-рейки 22 сразу в правое крайнее положение. Аналогично работает привод тележки 18 - цилиндр 21.
Для загрузки изделия в первый ряд та0 ры 27 поршень-рейка 22 (фиг. 6) из левого крайнего положения перемещается вправо до тех пор, пока шток 23 не будет останоз- лен поршнем 24, занимающим левое положение. Движение поршня-рейки 22 через зубчатую передачу 16 поворачивает направляющие 14 в опоре 15. Рука 3, скалки ко- 1 орой расположены в направляющих 14, поворачивается вокруг вертикальной оси опоры 15 на 90°. Затем срабатыванием ци0
5
линдра 4 корпус I захватного органа но- ворачивается на 90° вокруг оси 2. Цилиндр 13 опускает руку 3 с изделием, зажатым рычагами 6 и 7, в ячейку тары 27. Включается цилиндр 10, раскрывая рычаги 6 и 7. Изделие остается в ячейке тары 27. Рука 3 возвращается в исходное положение или направляется за следующим изделием.
Для погрузки изделия на конвейер 26 при включении привода 17 поворота пор- щень-рейка 22 перемещается в.месте с поршнем 24 в крайнее правое положение. При этом рука 3 поворачивается вокруг вертикальной оси на 180° от исходного положения. При погрузке изделия в ложемент 29 подвески конвейера 26 цилиндр 13 опускает руку 3, рычаги 6 и 7 раскрываются и при отходе тележки 18 от правого крайнего положения изделие остается в ложементе 29, раскачивание которого предотвращается лыжей 30.
Привод моста 20 срабатывает при необходимости передвижения руки 3 вдоль трасс конвейеров 25 и 26, а также вдоль рядов ячеек тары 27.
Устройство работает в автоматическом режиме.
0
5
0
5
Формула изобретения
Устройство для перегрузки изделий, включающее тележку, установленный на ней перегрузочный механизм в виде поворотной руки с приводами поворота и подъема и установленный на поворотной руке захватный орган, отличающееся тем, что, с целью повыщения надежности работы устройства при перегрузке изделий, захватный орган установлен на поворотной руке посредством смонтированной на последней продольной оси и снабжен силовым цилиндром поворота, корпус которого шарнирно закреплен на корпусе захватного органа, а его П1ток связан посредством кронштейна продольной осью, при этом поворотная рука установлена на тележке посредством смонтированных на последней поворотных направляющих и расположенных в них скалок, связанных с приводом подъема и смонтированных на поворотной руке, при этом привод поворота последней выполнен в виде силового цилиндра, выполненного с дополнительной камерой и ступенчатым штоком и снабженного подвижно установленным на последнем упором в виде дополнительного поршня, размещенного в дополнительной камере, имеющей распределитель.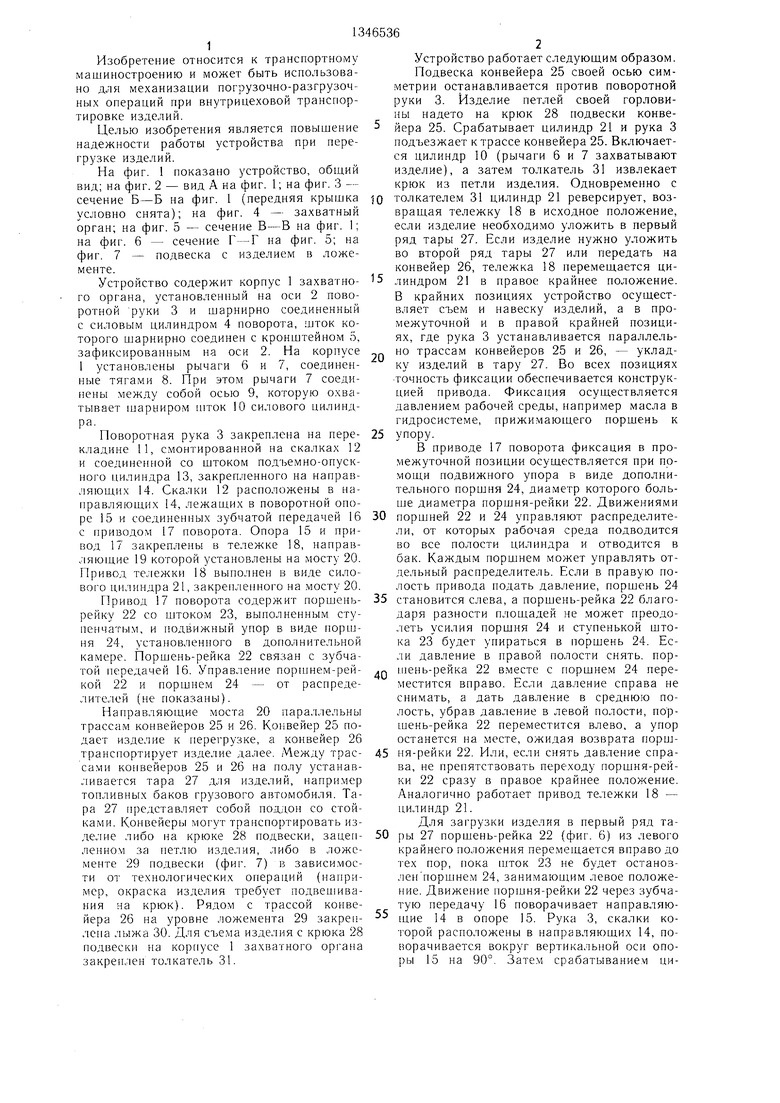
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Манипулятор к прессу | 1986 |
|
SU1339011A1 |
| Подвесной конвейер с пневмоприводом | 1982 |
|
SU1071539A1 |
| Манипулятор | 1972 |
|
SU441141A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Устройство для подъема, перемещения и кантования изделий | 1979 |
|
SU880942A1 |
| Перегрузочное устройство тары | 1986 |
|
SU1418212A1 |
| Устройство для транспортирования и загрузки | 1987 |
|
SU1528708A1 |
| Перегрузочное устройство подвесного конвейера | 1982 |
|
SU1085909A1 |
| Устройство для перемещения и навешивания изделий | 1988 |
|
SU1572946A1 |

Изобретение относится к транспортному машиностроению и м.б. использовано для механизации погрузочно-разгрузочных операций при внутрицеховой транспор.ти- ровке изделий. Цель изобретения - повышение надежности работы устройства при перегрузке изделий. Устр-БО включает тележку (Т) 18, захватывающий орган и перегрузочный механизм в виде поворотной руки (ПР) 3 с приводами поворота и. подъема. Установлена ПР 3 на Т 18 посредством с.монтированных на ней поворотных направляющих и расположенных в них скалок. 25, смонтированных на ПР 3. Скалки связаны с приводом подъема, выполненным в виде силового цилиндра (СЦ) 21, закрепленного на мосту 20. Привод поворота ПР 3 выполнен в виде СЦ поворота и содержит поршень-рейку со ступенчаты.м штоком и подвижный упор в виде установленного в дополнительной камере поршня. Управление последним и поршнем-рейкой производится от распределителя. Па смонтированной на ПР 3 продольной оси установлен захватный орган, корпус 1 которого шарнирно закреплен с корпусом СЦ поворота. Его шток шарнирно соединен с кронштейном, зафиксированным на оси ПР 3. На корпусе 1 установлены рычаги 6 и 7, соединенные осью, которая охватывается 1парни- ром njTOKa С Ц поворота, и закреплен толкатель 31. Изделие петлей своей горловины надето на крюк 28 подвески конвейера 25. При срабатывании к трассе конвейера 25 подъезжает ПР 3. Включается СЦ поворота и рычаги 6 и 7 захватывают изделие. Толкатель 31 извлекает крюк из петли изделия. Одновременно СЦ 21 реверсирует, возвращая тележку 18 в исходное положение, если изделие необходимо уложить в первый ряд тары 27. 7 ил. с (Л 00 4: С5 СП Ct)
ЗГ 3
6-5
Pus.2
Фиг.З
J/
2ft
22
Составитель Б. Толчанов
Редактор Л. ГратиллоТехрбд И. ВересКорректор А. Зимокосов
Заказ 4650/19Тираж 775Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
) 13035, Москва, Ж-35, Ра чпская наб., д. 4/5 Производственно-полиграфическое мреднриятие, г. Ужгород, ул. Проектная, 4
| Устройство для межоперационного транспортирования грузов | 1975 |
|
SU601207A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для съема и передачи деталей с конвейера на рабочее место и обратно | 1973 |
|
SU534399A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
