(54) УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ПЛОСКИХ АСИММЕТРИЧНЫХ ПО КОНЦУ .ДЕТАЛЕЙ (ЕГО ВАРИАНТЫ)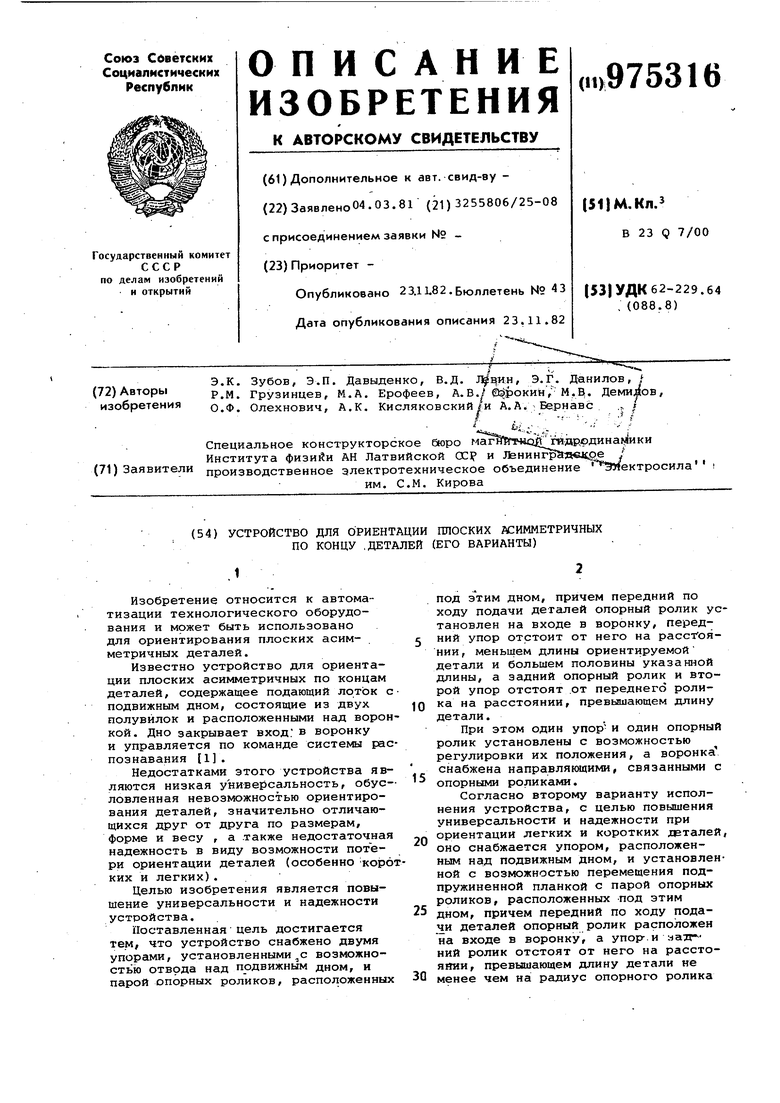

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации асимметричных токопроводящих деталей | 1983 |
|
SU1123838A1 |
| Устройство для ориентации и загрузки деталей в гнезда кассеты | 1987 |
|
SU1436158A1 |
| Устройство для подачи плоских деталей | 1981 |
|
SU973303A1 |
| Автомат для сборки предохранителей | 1975 |
|
SU564664A1 |
| Загрузочное устройство | 1980 |
|
SU931367A1 |
| Устройство для упаковки изделий в тару | 1978 |
|
SU766969A1 |
| Устройство для контроля и сортировки деталей | 1987 |
|
SU1442274A1 |
| Устройство управления процессом разбраковки и ориентации деталей | 1988 |
|
SU1639784A1 |
| Устройство для управления ориентацией и сортировкой деталей | 1982 |
|
SU1020206A1 |
| Устройство для кассетирования плоских деталей | 1988 |
|
SU1618578A1 |
Изобретение относится к автоматизации технологического оборудования и может быть использовано для ориентиройания плоских асимметричных деталей.
Известно устройство для ориентации плоских асимметричных по концам деталей, содержащее подающий лоток сподвижным дном, состоящие из двух полувйлок и расположенными над воронкой. Дно закрывает вход;в воронку и управляется по команде системы распознавания 1 .
Недостатками этого устройства являются низкая универсальность, обусловленная невозможностью ориентирования деталей, значительно отличающихся друг от друга по размерам, форме и весу , а .также недостаточная надежность в виду возможности потери ориентации деталей (особенно коротких и легких).
Целью изобретения является повышение универсальности и надежности устройства.
Поставленная цель достигается тем, что устройство снабжено двумя упорами, установленными ,jC возможностью отвода над подвижным дном, и парой опорных роликов, расположенных
под этим дном, причем передний по ходу подачи деталей опорный ролик установлен на входе в воронку, передний упор отстоит от него на рассТоянии, меньшем длины ориентируемой детали и большем половины указанной длины, а задний опорный ролик и второй упор отстоят .от переднего ролика на расстоянии, превышающем длину
10 детали.
При этом один упор и один опорный ролик установлены с возможностью регулировки их положения, а воронка снабжена направляющими, связанными с
15 опорными роликами.
Согласно второму варианту исполнения устройства, с целью повышения универсальности и надежности при ориентации легких и коротких деталей,
20 оно снабжается упором, расположенным над подвижным дном, и установленной с возможностью перемещения подпружиненной планкой с парой опорных роликов, расположенных -под этим 25 дном, причем передний по ходу подачи деталей опорный ролик расположен на входе в воронку, а упор- и аатпНИИ ролик отстоят от него на расстоя1П{и, превышающем длину детали не
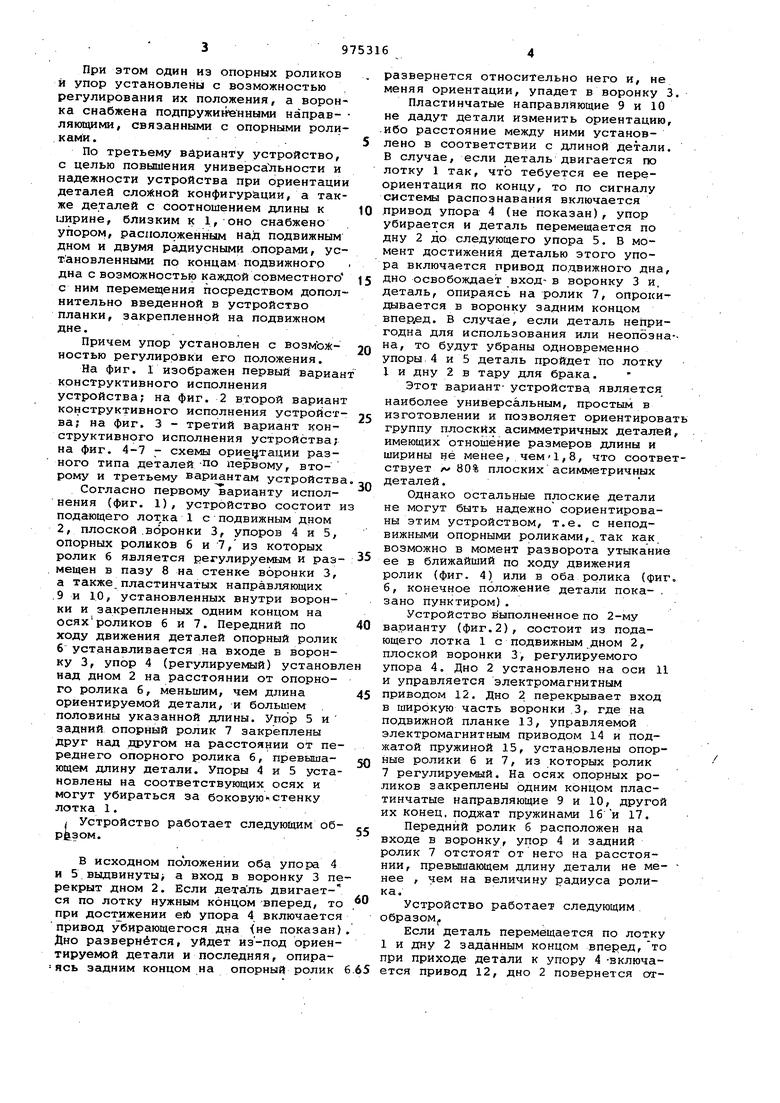
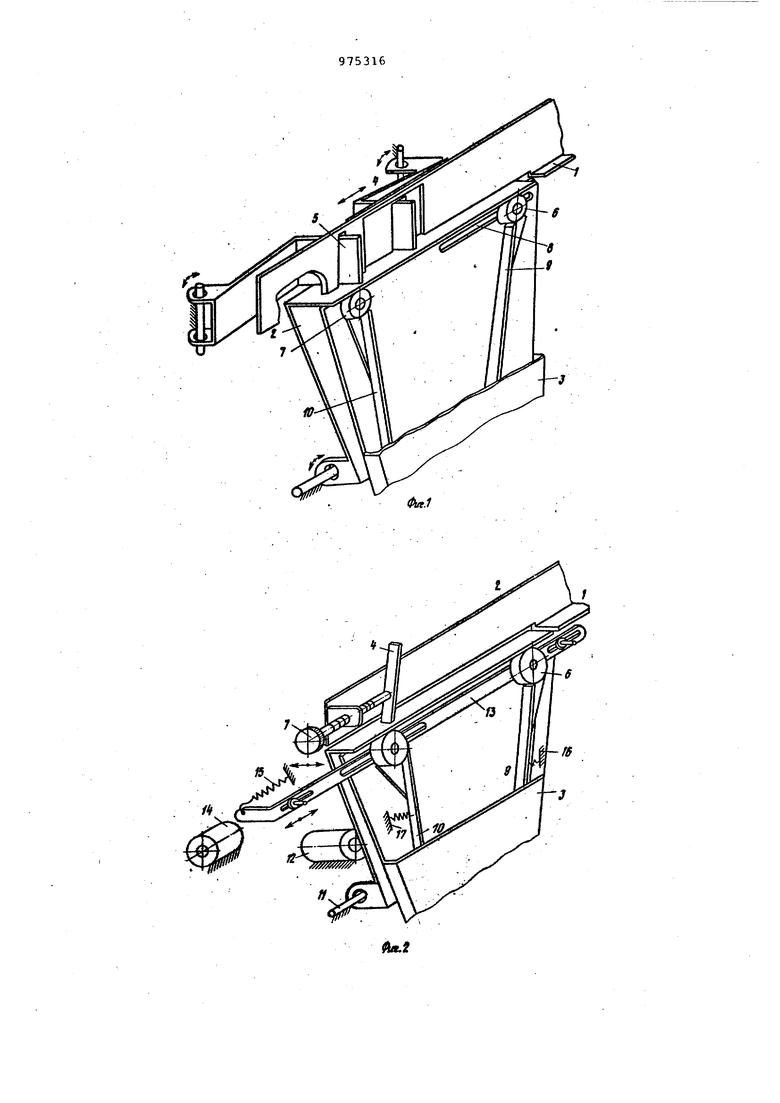
за менее чем на радиус опорного ролика При этом один из опорных роликов и упор установлены с возможностью регулирования их положения, а воронка снабжена подпружиненными направляющими, связанными с опорными роликами.. По третьему варианту устройство, с целью повышения универсальности и надежности устройства при ориентации деталей сложной конфигурации, а также деталей с соотношением длины к ширине, близким к 1, оно снабжено упором, расположенным над подвижным дном и двумя рсщиусными .опорами, установленными по концам подвижного дна с возможностью каждой совместного с ним перемещения посредством допол нительно введенной в устройство планки, закрепленной на подвижном дне. . Причем упор установлен с возмЪЖностью регулировки его положения. На фиг. I изображен первый вариан конструктивного исполнения устройства; на фиг. 2 второй вариан конструктивного исполнения устройст на; на фиг. 3 - третий вариант конструктивного исполнения устройства; на фиг. 4-7 - схемы ориентации разного типа деталей-по первому, второму и третьему вариантам устройств Согласно первому варианту исполнения (фиг. 1), устройство состоит подающего 1 с подвижным дном 2, плоской .воронки 3, упоров 4 и 5, опорных роликов 6 и 7, из которых ролик 6 является регулируемым и раз . мещен в пазу 8 на стенке воронки 3, а также пластинчатых направлгяющих .9 и 10, установленных внутри воронки и закрепленных одним концом на осяхроликов 6 и 7. Передний по ходу движения деталей опорный ролик 6 устанавливается на входе в воронку 3, упор 4 (регулируемый) установ над дном 2 на расстоянии от опорного ролика 6, меньшим, чем длина ориентируемой детали, и больаюм . половины указанной длины. Упор 5 и задний опорный ролик 7 закреплены друг над другом на расстоянии от пе реднего опорного ролика 6, превышающем длину детали. Упоры 4 и 5 уста новлены на соответствующих осях и могут убираться за боковую«стенку лотка 1. Устройство работает следующим об . В исходном положении оба упора 4 и 5,выдвинуты а вход в воронку 3 п рекрыт дном 2. Если деталь двигается по лотку нужным концом вперед, т при достижении ей упора 4 включаетс привод убирающегося дна не показан Дно развернётся, уйдет из-под ориен тируемой детали и последняя, опира ясь задним концом на опорный ролик азвернется относительно него и, не еняя ориентации, упадет в воронку 3. Пластинчатые направляющие 9 и 10 е дадут детали изменить ориентацию, бо расстояние между ними установено в соответствии с длиной детали. случае, если деталь двигается по отку 1 так, что тебуется ее перериентация по концу, то по сигналу истемы распознавания включается ривод упора 4 (не показан), упор бирается и деталь перемещается по ну 2 до следующего упора 5. В моент достижения деталью этого упоа включается привод подвижного дна, но освобождает вход- в воронку 3 и. еталь, опираясь на ролик 7, опрокиывается в воронку задним концом пердзд. В случае, если деталь неприодна для использования или неопозна-а, то будут убраны одновременно поры 4 и 5 деталь пройдет по лотку I и дну 2 в тару для брака. Этот вариант- устройства является наиболее универсальным, простым в изготовлении и позволяет ориентировать группу плоских асимметричных деталей, имеющих отношение размеров длины и ширины не менее, чем1,8, что соответствует л 80% плоских асимметричных деталей. Однако остальные плоские детали не могут быть надежно сориентированы этим устройством, т.е. с неподВИЖНЫМ.И опорными роликами,, так как возможно в момент разворота утыкание ее в ближайший по ходу движения ролик (фиг. 4) или в оба ролика (фиг. б, конечное положение детали пока- . зано пунктиром). Устройство выполне«ное по 2-му варианту (фиг.2), состоит из подающего лотка 1 с подвижным дном 2, плоской воронки 3, регулируемого упора 4. Дно 2 установлено на оси 11 и управляется электромагнитным приводом 12. Дно 2 перекрывает вход в широкую часть воронки .3, где на подвижной планке 13, управляемой электромагнитным приводом 14 и поджатой пружиной 15, установлены опорные ролики б и 7, из которых ролик 7 регулируемый. На осях опорных роликов закреплены одним концом пластинчатые направляющие 9 и 10, другой их конец, поджат пружинами 16 и 17. Передний ролик 6 расположен на входе в воронку, упор 4 и задний ролик 7 отстоят от него на расстоянии, превышающем длину детали не ме- нее , чем на величину радиуса ролика. Устройство работает следующим образом Если деталь перемещается по лотку 1 и дну 2 заданным концом вперед, то при приходе детали к упору 4 -включается привод 12, дно 2 повернется относительно оси 11 и освободит вход в воронку 3. Деталь, не меняя ориен тации, развернется относительно переднего ролика и тем же концом вп ред упадет в воронку, причем положе ние детали надежно фиксируется направлякмцими 9 и 10. Если деталь при своем движений по лотку требует переориентации, то по сигналу системы распознавания планка 13 вместе с установленными на ней опорными роли ками 6 и 7 перемещается по отношени к остановленной детали и та paaaopia чивается относительно ролика 7. Устройство, :выполненое по 3-iyiy варианту (фиг. 3) состоит из подающего лотка, с подвижным дном 2, имеющим.двуплечую планку 18, а также из воронки 3. Подающий лоток имеет регулируемый упор 4, установл ный над дном 2. По концам дна 2 установлены подвижные радиусные опо ры б и 7, жестко связанные с электр магнитными приводами 19 и 20. Устройство работает следующим об разом. .При отсутствии сигналов распознавания дно 2 и опоры 6 и 7 перекры вают деталям путь в воронку 3. При подаче системой распознавания соответствукицего сигнала срабатывает од из приводов, например привод 19. По 1вижная опора 6 перемещается по напр лению к приводу и переместит через одно из плеч планки 18 дно 2. Вход в воронку 3 откроется и деталь развернется относительно опоры 7. ПрИ) срабатывании привода 20 разворют детали будет происходить вокруг опо ры 6. Использование устройства (каждого из его вариантов) позволит значител но улучшить надежность вторичного ориентирования плоских деталей в широком диапазоне их типоразмеров. Формула изобретения 1. Устройство для ориентации плос ких асимметричных по концу деталей, содержащее подающий лоток с подвижным дном, расположенным над воронкой, отличающееся тем, что, с целью повышения универсальности и надежности устройства, оно снабжено двумя упорами,установленными с возможностью отвода над подвижным дном, и парой опорных роликов, расположенных под этим дном, причем передний по ходу подачи деталей опорный ролик установлен на входе в воронку, передний упор отстоит от него на расстоянии, меньшем длины сриёнтируёмой детали и большем половины указанной длины, а задний опорный ролик и второй упор отстоят от перед него ролика на расстоянии, превышакедем длину детали. 2.Устройство ПОП.1, отличающееся тем, что один упор и один опорный ролик установлены с возможностью регулирования их положения, а воронка снабжена направляюnpiMH, связанными с опорными роликами. 3.Устройство для ориентации плоских асимметричных по концу деталей, содержащее подающий лоток с подвижньм дном, расположенным над воронкой, отлич-ающееся тем, что, с цeJTЬю повышения универсальностей и надежности устройства при ориентации легких и коротких деталей, оно снабжено упором, расположенным над подвижным дном, и установленной с возможностью перемещения подпружиненной планкой с парой опорных роликов, расположенных под этим дном, причем передний по ходу подачи деталей опорный РОЛ.ЙК расположен на входе в воронку,а упор и задний ролик oVcTOHT от иего на расстоянии, превышающем длину детали не менее чем на радиу9 одного опорного ролика. 4.Устройство по п.З, о т л и ч аю щ е е с я тем, что один из опорных роликов и упор установлены с возможностью регулирования их положения, а воронка снабжена подпружиненными направляющими, связанными с опорными роликами. 5.Устройство для ориентации плоских асимметричных по концу деталей, содержащее подающий лоток с подвижным дном, расположенным над воронкой, отличающееся тем, что, с цельюповышения универсальности и надежности устройства при ориентации деталей сложной конфигурации, а также деталей с соотношением длины к ширине, близким к 1, оно снабжено упором, расположенным над -ПОДВИЖНЫМ дном двумя радиусными опорами, установленными на конца этого дна с возможностью каждой совместного с ним перемещения посредством дополнительно введенной в устройство планки, закрепленной на подвижном дне. 6.Устройство по п. 5, о т л ичающееся тем, что упор, установлен с возможностью регулирования его положенияi Источники информации, принятые во .внимание цри экспертизе 1. Камышный Н.И. Автоматизация загрузки .станков, М., Машинострое иe, 1977, рис. 4ба, с. 54.
lit
ФиеМ
X
Фиг. 6
