Изобретение относится к оборудованию для производства строительных материалов и может быть использовано в промышленности строительных материалов на заводах по изготовлению керамических материалов.
и,елью изобретения является расширение технологических возможностей механизма и повышение надежности его работы,
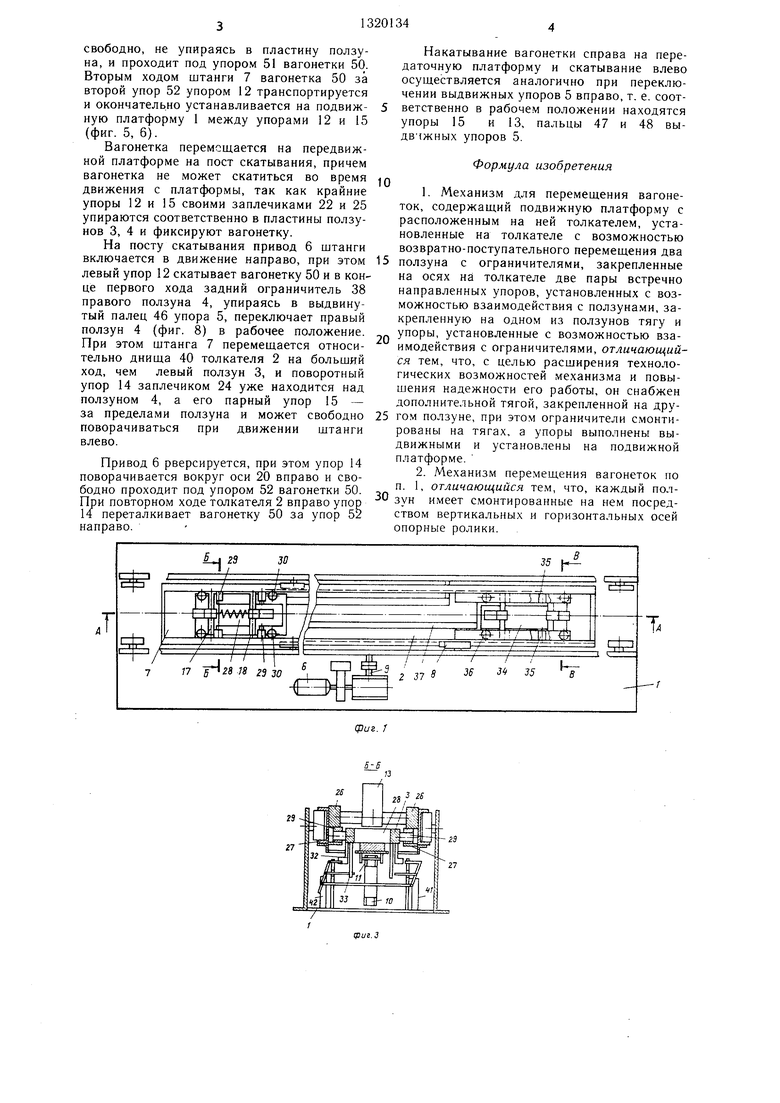
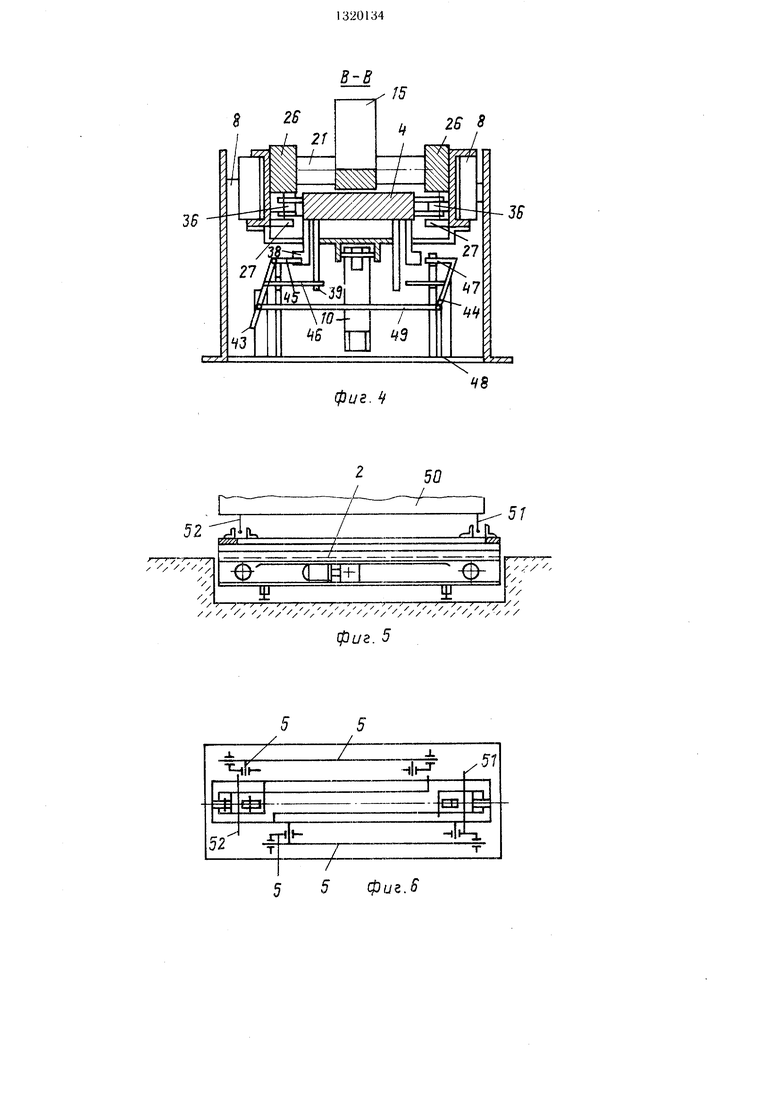
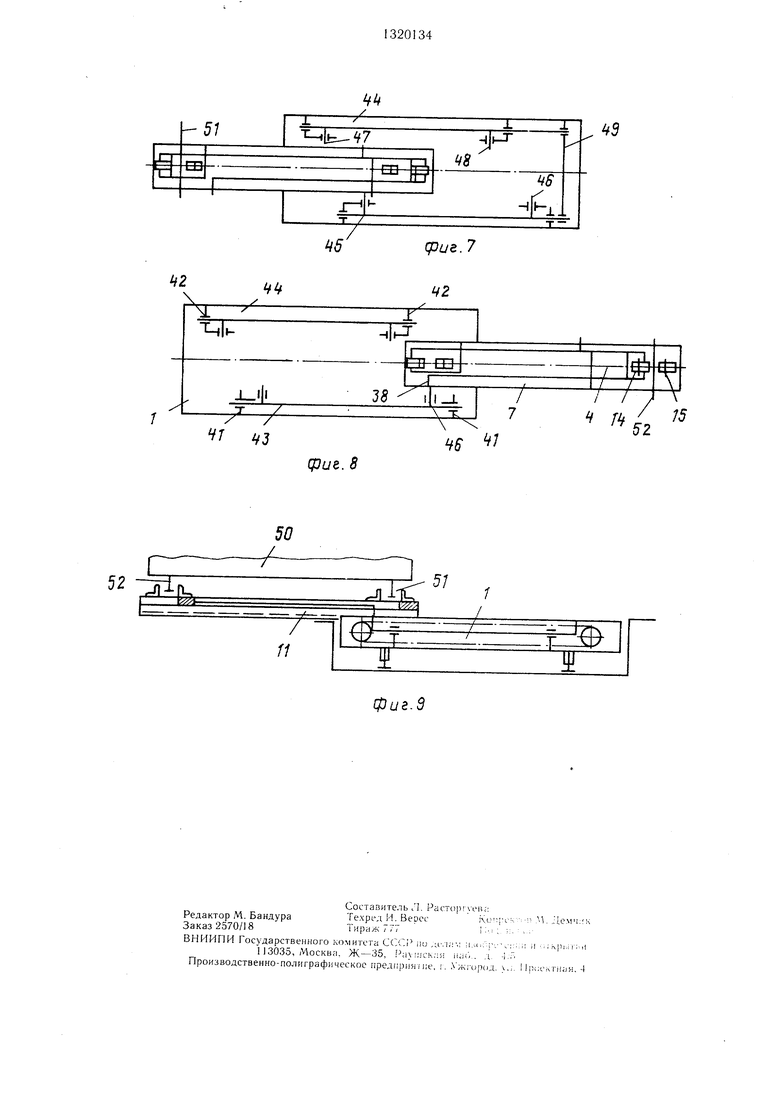
На фиг. 1 изображен механизм с условно снятыми в левой части чертежа направляющими, вид в плане; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2 по ползуну и роликам на горизонтальных осях; на фиг. 4 - разрез В- В на фиг. 1 (по ползуну и роликам на вертикальных осях); на фиг. 5 - транспортное положение вагонетки; на фиг. 6 - схема положения выдвижных упоров при транспортировке вагонетки; вид в плане; на фиг. 7 - схема накатывания вагонетки толкателем на механиз.м для перемещения вагонетки; на фиг. 8 - схема скатывания вагонетки толкателем на правую сторону; на фиг. 9 - то же, на левую сторону.
Механизм для перемещения вагонеток содержит подвижную платформу I, толкатель 2, установленные на толкателе 2 с возможностью возвратно-поступательного перемещения два ползуна - левый 3 и правый 4, выдвижные упоры 5 (фиг. 6). Толкатель и выдвижные упоры смонтированы на передвижной платформе. Толкатель 2 предназначен для накатывания на передвижную платформу вагонетки с обеих сторон и скатывания вагонетки на обе стороны по отношению к перемещению платформы.
Толкатель 2 состоит из привода 6, щтан- ги 7 и направляющих роликов 8, закрепленных на платформе 1. Штанга 7 установлена на роликах 8.
Привод 6 смонтирован на раме подвижной платформы 1 и соединяется со штангой 7 валом 9, звездочкой 10 и рейкой 11, закрепленной на штанге 7. Штанга 7 содержит левые пары встречно направленных поворотных упоров 12 и 13 и правые пары встречно направленных поворотных упоров 14 и 15. Левые парные упоры 12 и 13 соединены пружиной 16 и установлены на осях 17 и 18, а правые парные упоры 14 и 15 установлены на осях 20 и 21 на штанге 7 с возможностью взаимодействия соответственно с ползунами 3, 4. Упоры 12-15 имеют соответственно заплечики 22-25.
Ползуны левый 3 и правый 4 предназначены для переключения упоров 12-15 в рабочее положение при скатывании вагонетки после транспортировки ее на передвижной платформе. Ползуны 3 и 4 смонтированы на штанге 7 в верхних 26 и нижних 27 направляющих, укрепленных на штанге 7 (фиг. 4).
Левый ползун 3 имеет окно 28, на ползуне на каждой его продольной стороне
0
смонтирована пара роликов 29 на горизонтальных осях и пара роликов 30 на вертикальных осях. На ползуне 3 закреплена тяга 31 с ограничителями 32 и 33 (фиг. 1,2).
Правый ползун 4 имеет окно 34. На ползуне 4 на каждой его продольной стороне смонтирована пара опорных роликов 35 на горизонтальных осях и пара опорных роликов 36 на вертикальных осях. На ползуне 4 зак-реплена дополнительная тяга 37 с ограничителями 38 и 39 (фиг. 1,4).
Ползуны 3 и 4 установлены в щтанге 7 таким образом, что ролики 29 и 35 контактируют с верхними 26 и нижними 27 направляющими, ролики 30 и 36 - с боко5 выми стенками щтанги, а сами ползуны 3 и 4 - с днищем 40 штанги, причем в исходном положении поворотные упоры 12 и 15 своими заплечиками 22 и 25 контактируют с ползунами 3 и 4. Поворотные упоры 13 и 14 находятся соответственно над окна0 ми и могут свободно поворачиваться направо и налево.
Выдвижные упоры 5 предназначены для установки в автоматический режим переключения ползунов 3 и 4 при выборе схемы
5 накатывания вагонетки на передвижную платформу и скатывания с нее. Выдвижные упоры 5 смонтированы на платформе 1 по обе стороны щтанги 7. Они состоят из опор 41 и 42, на которых установлены оси 43 и 44 с выдвижными пальцами 45-
0 48. Оси 44 и 43 соединены между собой тягой 49.
Механизм для перемещения вагонеток работает следующим образом. В зависимости от направления накатывания вагонеток, например, слева и скатывания направо
5 выдвижные упоры 5 устанавливаются в положение выдвинутым вправо пальцами 45 и 46 (фиг. 4). Включается привод 6, который перемещает звездочкой 10 рейку 11 и штангу 7 влево по направляющим роликам 8 к вагонетке 50.
При перемещении щтанги 7 из исходного положения влево первый по направлению движения поворотный упор 12 левого парного поворотного упора находится в рабочем положении, т. е. его заплечик 22 на5 ходится над левым ползуном 3 и при встрече с упором 51 вагонетки поворачивается направо вокруг оси 17, отклоняется и затем пружиной 16 возвращается в исходное положение. Перемещение штанги 7 влево после захвата вагонетки прекращается конечным
0 выключателем (не показан).
Привод 6 реверсируется и щтанга 7 упором 12 накатывает частично вагонетку 50 на подвижную платформу 1. Затем снова включается привод 6 на второй ход влево, при этом второй упор 13 левого пар5 ного упора, находясь в исходном нерабочем положении над окном 28 левого ползуна 3, поворачивается свободно, не упираясь над окном 28 левого ползуна 3, поворачивается
свободно, не упираясь в пластину ползуна, и проходит под упором 51 вагонетки 50. Вторым ходом штанги 7 вагонетка 50 за второй упор 52 упором 12 транспортируется и окончательно устанавливается на подвижную платформу 1 между упорами 12 и 15 (фиг. 5, 6).
Вагонетка перемещается на передвижной платформе на пост скатывания, причем вагонетка не может скатиться во время движения с платформы, так как крайние упоры 12 и 15 своими заплечиками 22 и 25 упираются соответственно в пластины ползунов 3, 4 и фиксируют вагонетку.
На посту скатывания привод 6 штанги включается в движение направо, при этом левый упор 12 скатывает вагонетку 50 и в конце первого хода задний ограничитель 38 правого ползуна 4, упираясь в выдвинутый палец 46 упора 5, переключает правый ползун 4 (фиг. 8) в рабочее положение. При этом штанга 7 перемещается относительно днища 40 толкателя 2 на больший ход, чем левый ползун 3, и поворотный упор 14 заплечиком 24 уже находится над ползуном 4, а его парный упор 15 - за пределами ползуна и может свободно поворачиваться при движении штанги влево.
Привод 6 рверсируется, при этом упор 14 поворачивается вокруг оси 20 вправо и свободно проходит под упором 52 вагонетки 50. При повторном ходе толкателя 2 вправо упор 14 переталкивает вагонетку 50 за упор 52 направо.
Накатывание вагонетки справа на передаточную платформу и скатывание влево осуществляется аналогично при переключении выдвижных упоров 5 вправо, т. е. соот- ветственно в рабочем положении находятся упоры 15 и 13, пальцы 47 и 48 вы- двчжных упоров 5.
Формула изобретения
0
1. Механизм для перемещения вагонеток, содержащий подвижную платформу с расположенным на ней толкателем, установленные на толкателе с возможностью возвратно-поступательного перемещения два
5 ползуна с ограничителями, закрепленные на осях на толкателе две пары встречно направленных упоров, установленных с возможностью вза и.моде ист ВИЯ с ползунами, закрепленную на одном из ползунов тягу и упоры, установленные с возможностью взаимодействия с ограничителями, отличающийся тем, что, с целью расширения технологических возможностей механизма и повышения надежности его работы, он снабжен дополнительной тягой, закрепленной на дру5 гом ползуне, при этом ограничители смонтированы на тягах, а упоры выполнены выдвижными и установлены на подвижной платформе.
2. Механизм перемещения вагонеток по п. 1, отличающийся тем, что, каждый пол0 зун имеет смонтированные на нем посредством вертикальных и горизонтальных осей опорные ролики.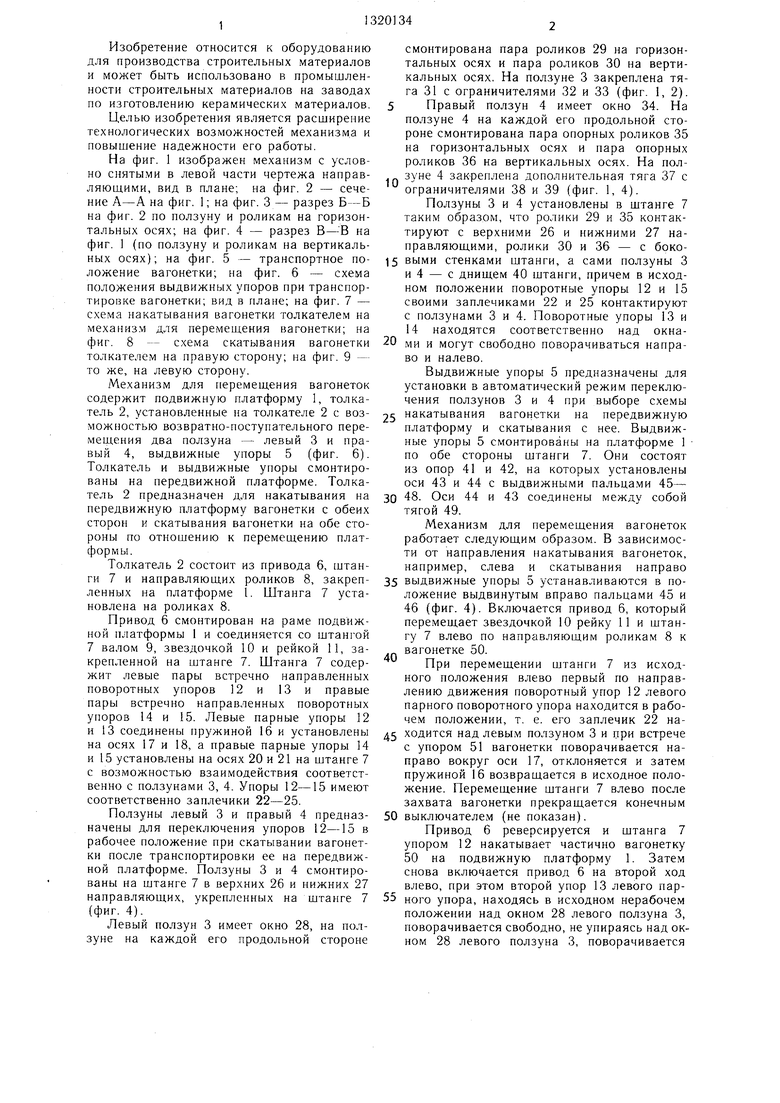
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для перемещения вагонеток | 1982 |
|
SU1133105A1 |
| Толкатель вагонеток | 1982 |
|
SU1041852A1 |
| Толкатель для перемещения вагонеток | 1981 |
|
SU977918A1 |
| Устройство для приема и сталкивания вагонеток | 1982 |
|
SU1039831A1 |
| Тележка для транспортировки вагонетки | 1983 |
|
SU1114869A1 |
| Устройство для передачи вагонеток с одного магистрального рельсового пути на другой, параллельный первому | 1971 |
|
SU563341A1 |
| Устройство для перемещения формвагонеток | 1979 |
|
SU863485A1 |
| Толкатель для перемещения вагонеток | 1979 |
|
SU879232A1 |
| УСТРОЙСТВО для ПРИЕМА СУШИЛЬНЫХ ВАГОНЕТОК НА ЭЛЕКТРОЛАФЕТ И ИХ СТАЛКИВАНИЯ | 1971 |
|
SU303260A1 |
| Толкатель | 1985 |
|
SU1296816A1 |
Изобретение относится к оборудованию для производства строительных материалов и расширяет технологические возмож- ности конвейера и повышает надежность его работы. Механизм включает подвижную плат- форму 1 с расположенным на ней толкателем 2, состоящим из привода, штанги и на- правляюш,их роликов 8. На толкателе 2 установлены с возможностью возвратно- поступательного перемешения два ползуна - левый 3 и правый 4 с ограничителями. На ползуне 3 закреплена тяга 31, а на ползуне 4 - дополнительная тяга. На толкателе 2 закреплены на осях 17-21 две пары встречно направленных выдвижных упоров 12-15. Они установлены на платформе 1 с возможностью взаимодействия с ползунами 3, 4. Каждый ползун имеет смонтированные на нем посредством вертикальных и горизонтальных осей опорные ролики. При включении привода штанга по роликам 8 перемешается к вагонетке. Упор 12 находится в рабочем положении. Заплечник 22 находится над ползуном 3 и при встрече с упором вагонетки поворачивается вокруг оси 17. Перемещение штанги влево прекра- шается конечным выключателем. Привод реверсируется и штанга упором 12 накатывает вагонетку на платформу 1. 1 з. п. ф-лы, 9 ил. SS 10) / 40 32 fi Ю33 сриг. 2 Ow Ю О 3 40 Ч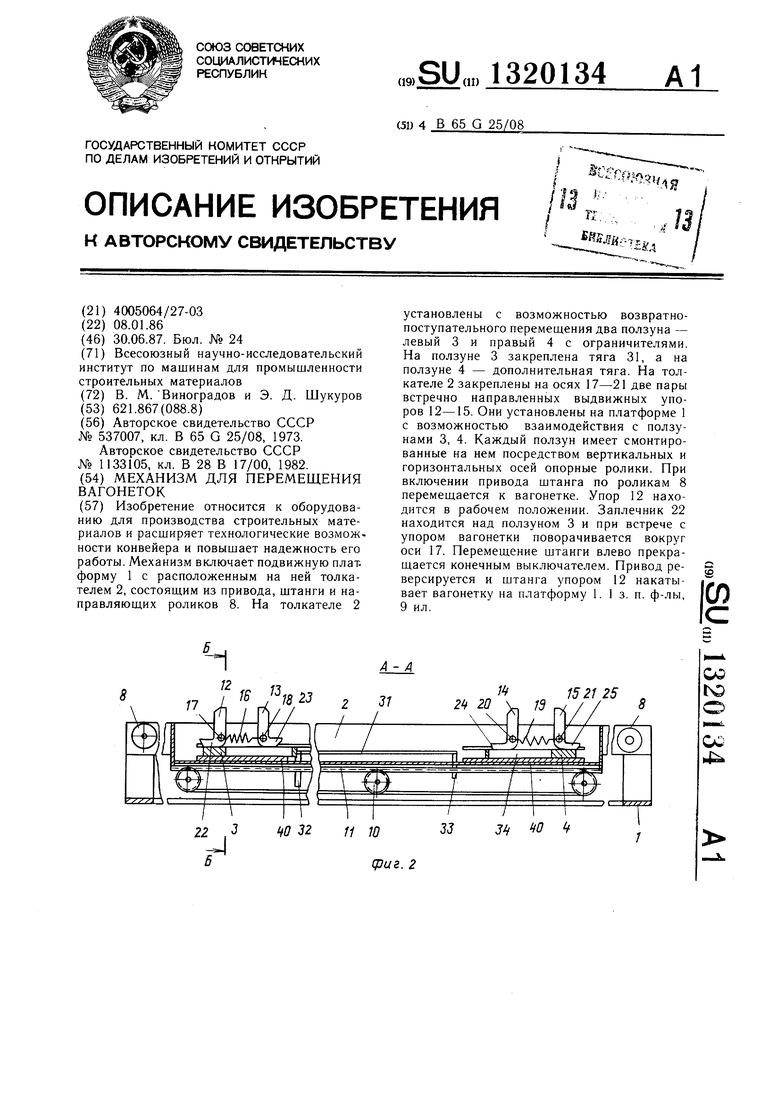
фиг. Ц
2В 8
фиг. 5
r j
фиг. 8
s
7
фиг.З
| Механизм для перемещения грузов | 1973 |
|
SU537007A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Механизм для перемещения вагонеток | 1982 |
|
SU1133105A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
