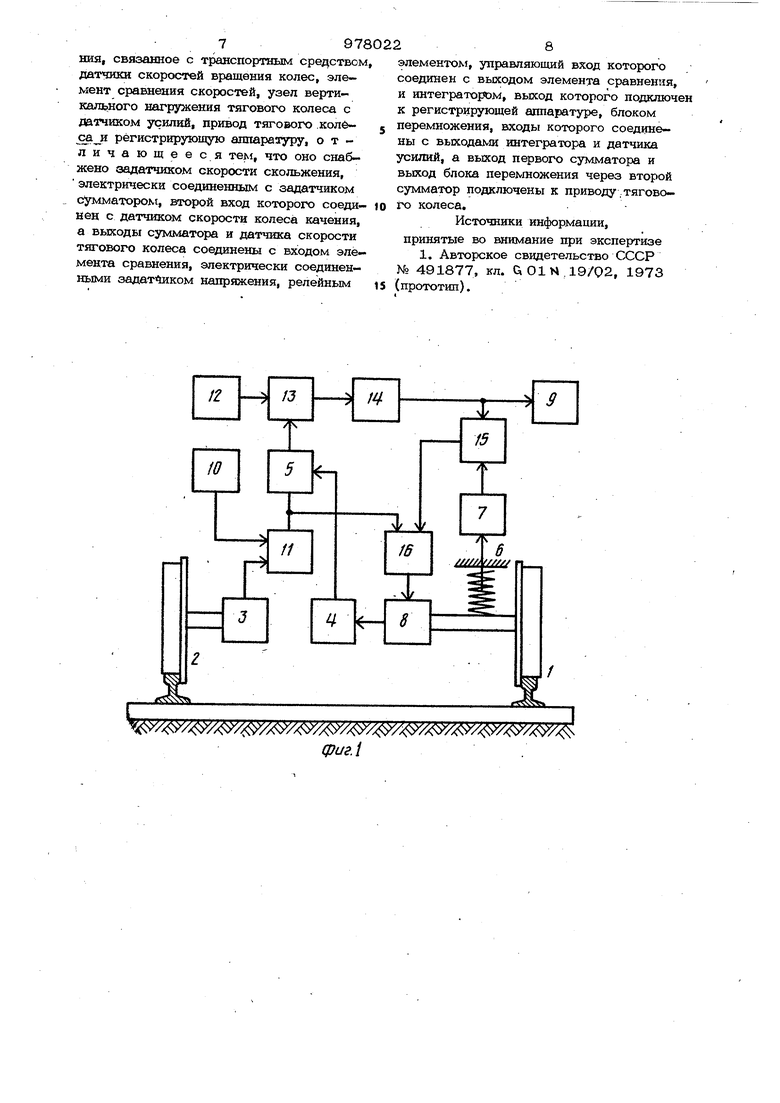
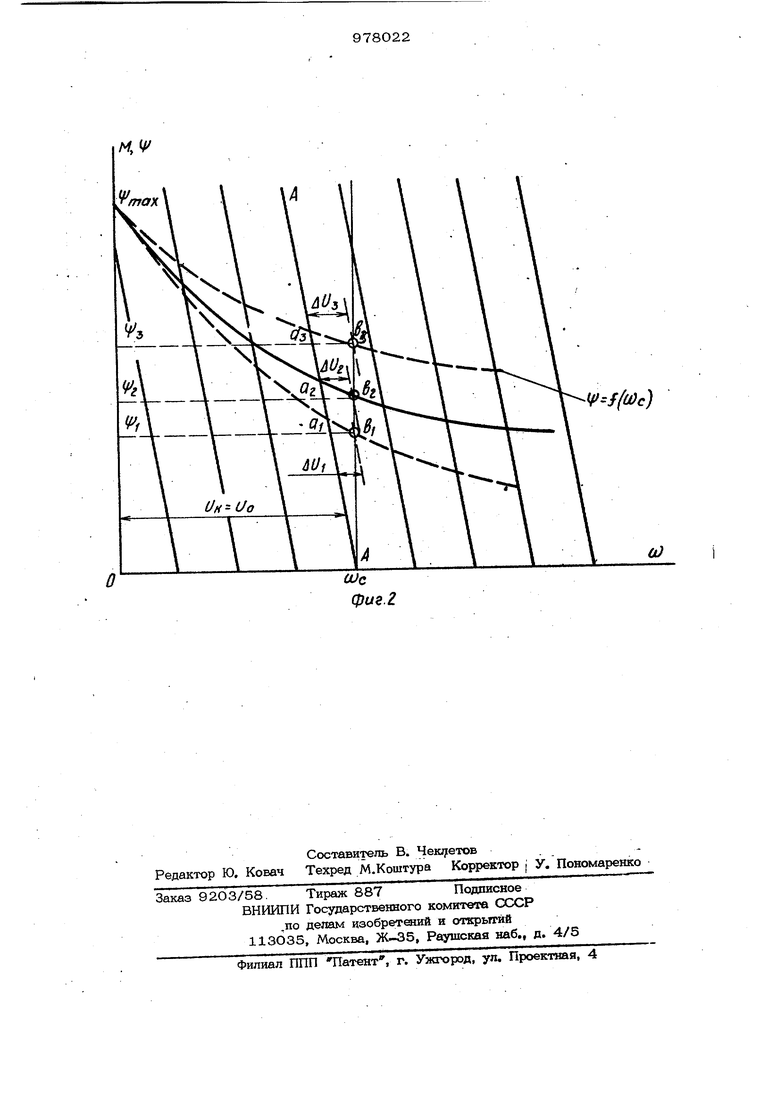
ния транспортного средства с помощью его колеса качения, а коэффициент сцепления оценивают по скоростям вращения обоих колес, на привод тягового колеса постоянно подают напряжение, пропорциональное сумме скорости рращения колеса качения и скорости проскальзьшания, ли- нейно повьинают напряжение до совпадения скорости вращения тягового колеса с упомянутой суммой скоростей, при рассогласовании скоростей напряжение линейно повышают или понижают согласно знаку рассогласования, скорость изме нения напряжения формируют пропорционально нагрузке на тяговое колесо, а коэффициент сцепления определяют по величине линейно изменяемого напряжения в моменты совпадения скоростей. Устройство для определения коэффициента сцепления колеса транспортного средства с рельсом, содержащее вспомогательное тяговое колесо и колесо качения, связанное с транспортным средством датчики скоростей вращения колес, элемент сравнения скоростей, узел вертикального нагружения тягового колеса с датчиком усилий, привод -тягового колеса и регистрирующую аппаратуру, снабжено задатчиком скорости скольжения, электрически соединенным с задатчиком сум матором, второй вход которого соединен с датчиком скорости качения колеса, а выходы сумматора и датчика скорости тягового колеса соединены с входом элемента сравнения, электрически соединенными задатчиком напряжения, релейным элементом, управляющий вход котор го соединен о выходом элемента сравнения, и интегратором, выход которого подключен к регистрирующей аппаратуре, блоком перемножения, входы которого УЬоединены с выходами интегратора и датчика усилий, а выход первого суммат ра и выход блока перемножения через второй сумматор подключены к приводу тягового колеса. На фиг,1 приведено предлагаемое устройство5 на фиг. 2 - семейство механических характеристик привода в за висимости от напряжения хштания и коэф фициенты сцепления в зависимости от скорости S fCuje). Устройство содержит вспомогательно тяговое колесо 1, колесо 2 качения, датчики 3 и 4 скоростей колес 1 и 2, элемент 5 сравнения скоростей, узел 6 нагружения колеса 1 с датчиком 7 усилий, привод 8 колеса 1, peгйcTpиpyющyю аппаратуру 9, задатчик 10 скорости скольжения, сумматор 11, задатчик 12 напряжения, релейный элемент 13, интегратор 14, блок 15 перемножения и втоой сумматор 16. Способ осуществляется следующим образом. Вертикально нагружают с помощью узла 6 тяговое колесо 1, измеряют скоости колес 1 и 2 датчиками 3 и 4 соответственно. Сигнал с датчика 4 подают на один из входов сумматора 11, а на другой его вход - с задатчика 10 скорости скольжения. Результирующий сигнал в элементе 5 сравнения сравнивается с сигналом датчика 3 скорости колеса 1. Напряжение с выхода задатчика 12 через релейный элемент 13, которьш изменяет полярность, интегрируется во времени интегратором 14. Переключение элемента 13 осуществляется сигналом рассогласования между скоростью тягового колеса 1 и суммой скорости колеса 2 и скорости проскальзьшания, пода ваемого с выхода элемента; 5 сравнения. Результат интегрирования в блоке 15 . умножается на сигнал с датчика 7 усилий, который пропорционален нагрузке на тяговое колесо 1. Привод 8 питается от первого сумматора 11 и блока 15 перемножения через второй сумматор 16. Таким образом, на привод тягового колеса 1 подают напряжение, пропорциональное сумме скорости вращения колеса 2 качения и скорости проскальзьшания. В моменты, когда скорость тягового колеса 1 превосходит сумму скорости колеса качения и скорости проскальзьшания, напряжение изменяется с линейновозрастающего- на линейноподающее. Когда скорость колеса 1 меньще упомянутой суммы скоростей, напряжение с линейноподающегчэ меняется на линейновозрастающее. Во всех случаях совпадения сравниваемых скоростей выходной, сигнал с интегратора 14 пропорционален соответствующему коэффициенту сцепления 4 колеса 1 с рельсом в соответствии с формулой ди, (1) rR - где К - коэффициент пропорциональйости;С- - конструктивная постоянная привода; Ф - магнитный поток; R - радиус колеса; ли - выходное напряжение интегратора 14, пропорциональное сумме скорости вращения коле са 2 качения и скорости проскальзывания. Для фиксации информации о скоростях |вращения колес 1 и 2, скорости проскал ;зьтания, усилий используют аппаратуру. 9, к которой подключен выход интеграто ра 14. Пример. Соотношение (1) на фиг. 2 изображено для скорости движения транспортного средства, равной нулю При подаче на привод 8 напряжения U| + U.4 ( L/, - напряжение, пропорциональное скорост / колеса 2, Ur, напряжение, пропорциональное скорости проскальзывания), пропорционального сум ме скорости колеса качения (в данном случае она равна нулю) и заданной скорости проскальзывания со ( , привод 8 работает на характеристике А-А, на которой в зависимости от реальной характеристики сцепления рабочими точками будут о( , с|,или o)j , где скорость вращения тягового колеса 1 меньше суммы скорости колеса 2 качения и заданной скорости проскальзьшания (в данном случае О + с). Для обеспечения совпадения скоростей на привод 8 дополнитель но подается напряжение Л U , или ди и рабочие точки переместятся в 1 о. Ьа которых реализуемы коэффициент сцепления имеет значение . .iUi AU2 лМ 3. причем- , или Таким образом, величина выходного напряжения интегратора 14, пропорциональ но которому на привод 8 подавэт вторую составляющую напряжения, пропорциональ на реализуемому при заданных условиях коэффициенту сцепления. Задавая различные значения скорости проскальзывания, по величине выходного сигнала интегратора 14 определяется коэффициент сцепления в зависюи ости от скорости проскальзывания. Для определения зависимости коэф4и1- циента сцепления от скорости движения транспортного средства ему задают различные скорости поступательного движения, а. скорость проскальзывания задают ра.вной нулю. Kait и в предьщушем процессе измерений для определения коэ4 фициента сцепления в зависимости .от скорости проскальзьтания, о коэффици- . енте сцепления колеса 1 с рельсом при соответствующей скорости движения рранспортного средства судят по выход ному сигналу интегратора 14, .однако в этом случае привод 8 тягового колеса 1 питают суммой напряжений, одно из которых пропорционально только скорюсти колеса качения, а другое остается с прежним качеством и пропорционально произведению вертикальной нагрузки на выходной сигнал интегратора 14. Измеренный при таких условиях коэ(} фициент сцепления колеса 1 с рельсом имеет допустимое (по условиям сцепления без боксования) значение. Кроме того, коэффициент сцепления может бьпъ определен функции двух параметров: скорости движеш я TpaHcnoJJT ного средства и скорости проскальзывания, что является более полной характеристикой сцепления колеса с рельсом при различных режимах движения. Положительный. эффект обусловлен повышением тo шocти -определения коэффициента сцепления колеса транспортного средства с рельсом. Формула изобретения 1. Способ определения коэффициента Сцепления колеса транспортного средства с рельсом, заключающийся в том, что вертикально нагружают вспомогательное тяговое колесо с приводом транспортного средства, измеряют скорость движения транспортного средства с помощью его колеса качения, а коэффициент сцепления оценивают по скоростям вращения обоих колес, отличающийся тем, что, с целью повышения точности определения коэффициента сцеплишя в зависимости от скоростей проскальзьшания и поступательного движения транспортного средства, на привод тягового колеса постоянно подают напряжение, пропорциональное сумме скорости вращения колеса качения к скорости проскальзыва- ния, линейно повышают напряжение до совпадения скорости вращения тягового колеса с упомянутой суммой скоростей, при рассогласовании скоростей напряжение линейно повышают или понижают согласно знаку рассогласования, скорость изменения напряжения формируют пропорционально нагрузке на тяговое колесо, а коэффициент сцепления определяют по величине линейно изменяемого напряжения в моменты совпадения скоростей. 2. Устройство для определения коэ фициента сцеплейия колеса транспортйого средства с рельсом, содержащее вспомогательное тяговое колесо и колесо качения, связанное с транспортным средством датчики скоростей вращения колес, элемент сравнения скоростей, узел вертиквлького нагружения тягового колеса с датчиком усилий, привод тягового колё caji регистрирующую аппаратуру, отличающееся тед1, что оно снабжено аадатчиком скорости скольжения, электрически соединенным с задатчиком сумматорол, второй вход которого соединен с датчиком скорости колеса качения, а выходы сумматора и датчика скорости тягового колеса соединены с входом элемента сравнения, электрически соединенными аадат5ш ком наззряжения, релейным
элементом, управляющий вход которого соединен с выходом элемента сравнения, и интегратором, выход которого подключ к регистрирующей аппаратуре, блоком перемножения, входы которого соединены с выходами интегратора и датчика усилий, а выход первого сумматора и выход блока перемножения через второй сумматор подключены к приводу .тягового колеса.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 491877, кл. G01N.19/Q2, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство защиты от боксования и юза | 1986 |
|
SU1411172A1 |
| Устройство обнаружения боксования и юза колес транспортного средства | 1986 |
|
SU1371933A1 |
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
| Устройство для регулирования напряжения тягового генератора тепловоза | 1983 |
|
SU1158394A1 |
| Устройство для защиты от боксования и юза колес транспортного средства | 1983 |
|
SU1139653A1 |
| Измеритель скольжения колесной пары транспортного средства | 1987 |
|
SU1414673A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| Устройство противобоксовочной и противоюзовой защиты тягового электропривода | 1986 |
|
SU1318444A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРИВОДНОГО И/ИЛИ ТОРМОЗНОГО УСИЛИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОДВИЖНОГО СОСТАВА БЕЗ СВОБОДНЫХ ОСЕЙ В ОБЛАСТИ ГРАНИЧНОГО СЦЕПЛЕНИЯ КОЛЕС С РЕЛЬСАМИ | 1995 |
|
RU2105679C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПОДВИЖНЫМ СОСТАВОМ | 2000 |
|
RU2179515C2 |
k
/(a)c)
