Изобретение относится к транспортному машиностроению ,Ј именно к управлению преимущественно длиннобазными, входящими в состав автопоезда прицепами, имеющими поворотную тележку,
Целью изобретения является улучшение маневренности автопоезда путем обеспечения следования колес прицепного звена по колее задних колес тягача.
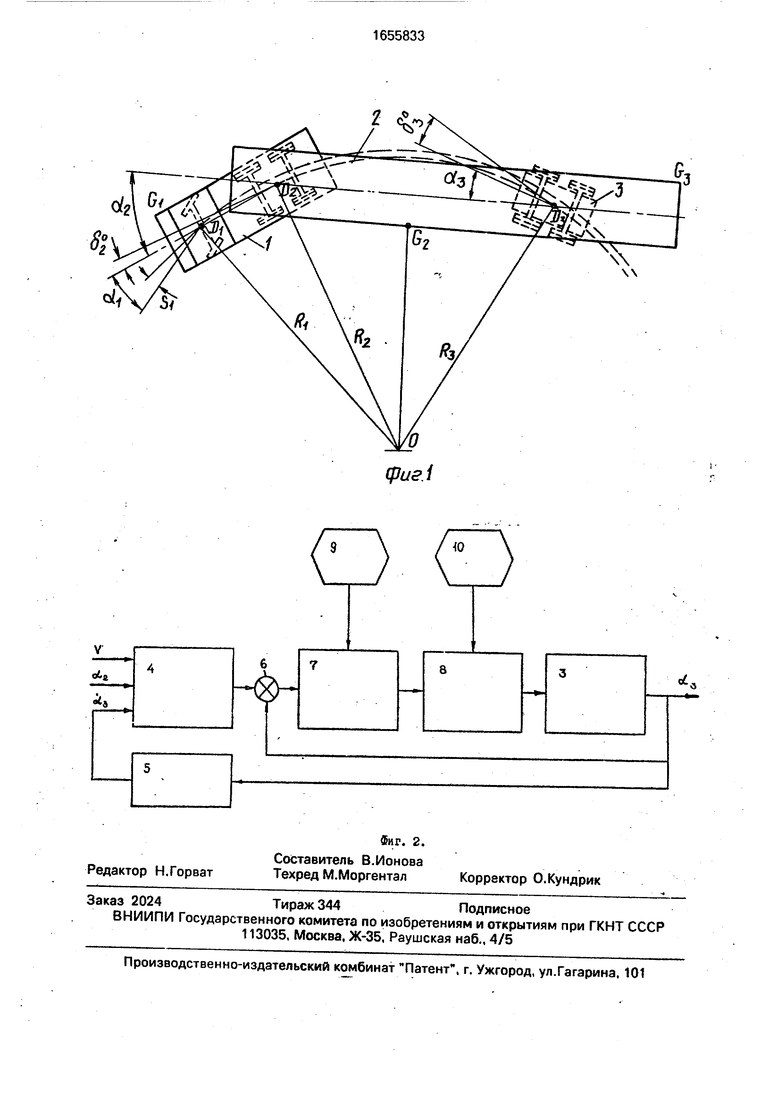
На фиг. 1 изображена схема кругового движения автопоезда с управляемым полуприцепом; на фиг. 2 - структурная схема системы управления.
Автопоезд (фиг. 1) состоит из тягача 1, платформы полуприцепа 2 и управляемой тележки 3. Способ реализуется с помощью системы управления (фиг. 2), основными элементами которой являются блок формирования входного сигнала 4, блок определения скорости изменения угла поворота тележки 5, сумматор 6, усилительно-преобразующее устройство 7, исполнительный механизм 8 и два источника энергии 9 и 10.
Для измерения необходимых величин использовались два датчика угловых перемещений потенциометрического типа для измерения углов аи и аз и индукционный
О
ел ел
00
ы
датчик измерения скорости движения, механически связанный с колесом полуприцепа. Электронные блоки 4 и 5, конструктивно выполненные как единое целое, состоят из известных элементов и служат для выработки входного сигнала. Эти блоки связаны своими входами с задающими датчиками, а своим выходом - с входом сумматора б, второй вход которого соединен с датчиком, измеряющим угол оз. Далее сумматор 6, усилительно-преобразующее устройство 7, исполнительное устройство 8 и объект управления 3 соединены последовательно, Поворот объекта управления 3 осуществляется электрогидравлической системой, содержащей электрический аккумулятор, электродвигатель с насосом, пиевмогидро- аккумулятор, гидрораспределитель с электромагнитным управлением и исполнительные гидроцилиндры. Источником энергии 9 для усилительно-преобразующего устройства являлась электрическая сеть автомобиля- тягача 1.
Устройство работает следующим образом.
При движении автопоезда на вход блоков 1 и 5 подаются сигналы от задающих датчиков. В блоке 4 вырабатывается сигнал, соответствующий расчетному углу поворота тележки 3. В сумматоре 6 эта величина сравнивается с действительным значением угла поворота управляемой тележки 3- Величина их рассогласования усиливается в устройстве 7 и исполнительное устройство 8 осуществляет корректировку положения тележки 3.
Блок 4 может функционировать как на основе аналогового сигнала (электронный блок), так и дискретного (микропроцессор, МикроЭВМ).
Формула изобретения
Устройство управления автопоездом, состоящим из тягача, шарнирно соединенного с полуприцепом, имеющим поворотную тележку, содержащее датчик угла складывания автопоезда, скорости его движения и угла поворота тележки полуприцепа, сумматор и исполнительный механизм, кинематически связанный с поворотной те0
5
0
5
0
5
лежкой, отличающееся тем, что, с целью улучшения маневренности путем обеспечения следования колес полуприцепа по колее задних колес тягача, оно снабжено блоком определения скорости изменения угла поворота тележки полуприцепа, вход которого соединен с датчиком угла поворота тележки полуприцепа, и блоком формирования управляющего сигнала, входы которого соединены с датчиками угла складывания автопоезда, скорости его движения и блоком определения скорости изменения угла поворота тележки полуприцепа, а его выход - с входом сумматора, другой вход которого соединен с входом датчика угла поворота тележки полуприцепа, а его выход - с исполнительным механизмом, при этом определяемый в блоке формирования управляющего сигнала угол оз поворота тележки полуприцепа вычисляется по следующей зависимости:
1о
од КП02 .
где Ktr Кп - W д - коэффициент пропорциональности;
ац - угол складывания автопоезда;
- база полуприцепа;
v - скорость движения;
аз - скорость изменения угла поворота задних углов колес полуприцепа;
К° 1- коэффициент пропорциональности без учета углов увода;
W(5 добавочный член, учитывающий углы увода;
Мзч„ 2v2sin«2
jtg
КЙЗ 1 6.25
40Ma0- масса автопоезда, приходящаяся
на задние колеса тягача;
Мз°- масса автопоезда, приходящаяся на колеса полуприцепа;
суммарный коэффициент боково- 45 го увода задних колес тягача;
Кб§- суммарный коэффициент бокового увода колес полуприцепа; р- коэффициент сцепления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДЛИННОБАЗНОГО АВТОПОЕЗДА | 2015 |
|
RU2604376C1 |
| Устройство для управления колесами полуприцепа | 1979 |
|
SU856883A1 |
| Привод управления поворотом транспортного средства | 1987 |
|
SU1533932A1 |
| Устройство для управления колесами звеньев автопоезда | 1977 |
|
SU765083A2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТОРМОЗНЫХ СИЛ НА КОЛЕСАХ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2028227C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Способ управления движением активного многозвенного транспортного средства и устройство для его осуществления | 1982 |
|
SU1094790A1 |
| АВТОПОЕЗД | 2004 |
|
RU2288129C2 |
| Способ управления поворотом автотранспортного звена | 1980 |
|
SU979192A1 |
| Привод управления поворотом двухосной тележки полуприцепа | 1984 |
|
SU1199692A1 |
Изобретение относится к транспортному машиностроению, а именно к управлению преимущественно длиннобазными входящими в состав автопоезда полуприцепами, имеющими поворотную тележку. Целью изобретения является улучшение маневренности автопоезда путем обеспечения следования колес прицепного звена по колее колес .тягача. В устройстве управления автопоездом предлагается угол поворота колес полуприцепа определять по формуле: G3 Kntf2-(L2/3V)-os, где аз угол поворота задних колес полуприцепа; Кп - коэффициент пропорциональности; - угол складывания автопоезда; L2 -база полуприцепа, V-скорость движения; аз - скорость изменения угла поворота задних колес полуприцепа. При этом Кп К8 - ,где Кп°- коэффициент пропорциональности без учета углов увода (Кп 1) ; Wd-добавочный член, учитывающий углы увода. Учет углов увода в процессе поворота обеспечивает повышение точности следования колес полуприцепа по колее колес тягача. 2 илл.
ь
н&фиг.1
8
| Устройство для управления поворотом ведомых звеньев автопоезда | 1976 |
|
SU652019A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
