1
Изобретение откосится к автомобилестроению, в частности, к устройствам для управления поворотом автотранспортных звеньев, преимущественно равнобазных многозвенных автопоездов, и является усовершенствованием известного устройства, описанного в авт. св. № 653163.
В основном изобретении по авт. св. № 653163 описано устройство для управления колесами звеньев автопоезда, содержащее датчик угла поворота колес предшествующего звена, датчик угла складывания стяжных звеньев автопоезда, сумматор углов, выход которого соединен с приводом поворота колес, и блок запаздывания, включенный между датчиком угла поворота колес предшествующего звена и одним из входов сумматора, второй вход которого соединен с датчиком угла складывания предшествующего звена с последующим относительно управляемых колес 1.
Недостатком известного устройства является необходимость для управления передними и задними колесами последующих звеньев автопоезда, включения в последовательную цепь системы управления дополнительных сумматоров углов и датчиков углов складывания смежных звеньев, что снижает вероятность безотказной работы устройства.
Цель изобретения - повышение надежности работы устройства.
, Указанная цель достигается тем, что блоки запаздывания последующих звеньев автопоезда выполнены двухканальными и соединены последовательно между собой, образуя два параллельных канала для управления задними и передними колесами 10 звеньев, причем канал управления передними колесами подсоединен к выходу блока запаздывания первого звена, а канал управления задними колесами подсоединен к выходу сумматора углов.
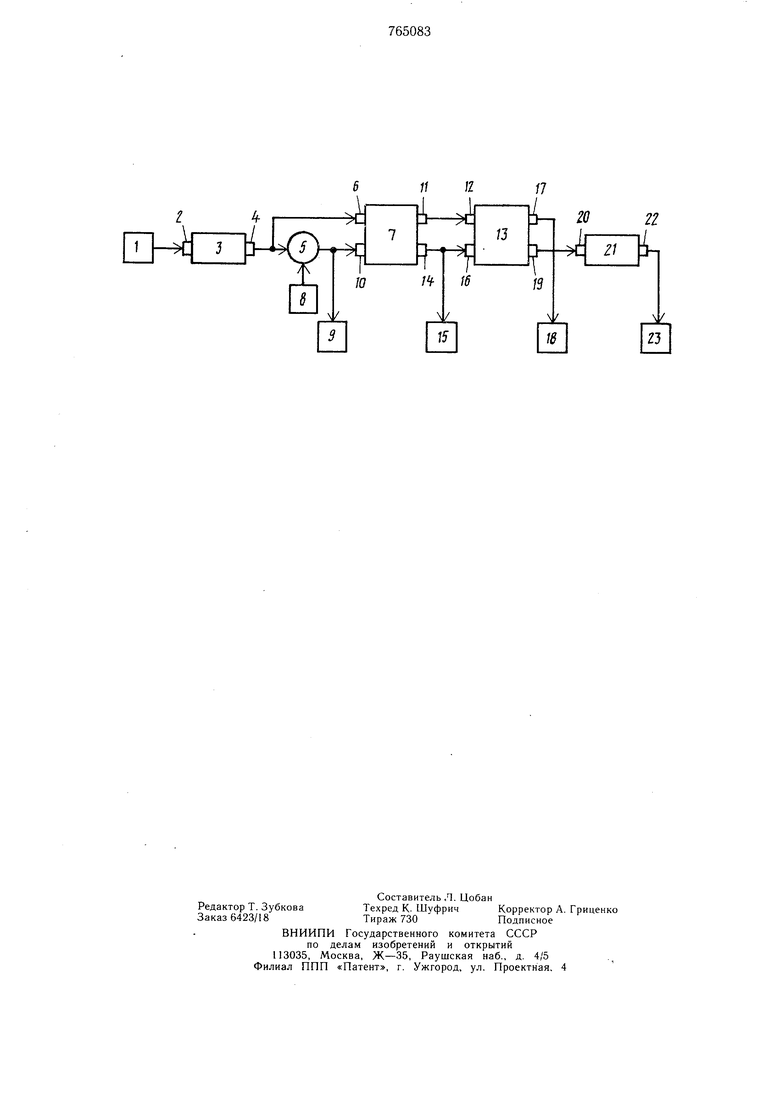
На чертеже приведена функциональная схема устройства для управления колесами звеньев автопоезда, состоящего из двухосного автомобиля-тягача, одноосного полуприцепа и двухосного прицепа.
Передние колеса тягача (первого звена) соединены с датчиком 1 угла их поворота, соединенным со входом 2 блока 3 запаздывания задних колес тягача, выход 4 блока 3 запаздывания соединен с одним из входов сумматора 5 углов и со входом 6
блока 7 запаздывания колес полуприцепа. Второй вход сумматора 5 углов соединен с датчиком 8 складывания смежных звеньев автопоезда, в данном случае рамы тягача с полуприцепом, а выход - с силовым приводом 9 поворота задних колес тягача и со вторым входом 10 блока 7 запаздывания. Выход 11 блока 7 запаздывания соединен со входом 12 блока 13 запаздывания передних колес прицепа. Выход 14 блока 7 запаздывания соединен с силовым приводом
15поворота колес полуприцепа и со входом
16блока 13 запаздывания. Выход 17 блока 13 запаздывания соединен с силовым приводом 18 поворота передних колес прицепа, а выход 19 - со входом 20 блока 21 запаздывания задних колес прицепа, выход
22которого соединен с силовым приводом
23поворота задних колес прицепа.
Блоки запаздывания каждого привода управления, кроме первого и последнего, выполнены в виде двухканальных систем программного управления с магнитной записью, каждая из которых имеет двухдорожечный носитель записи, головки воспроизведения, объединенные в один блок, и головки записи. Головки записи объединены в блок, выполненный подвижным вдоль носителя записи и связанный, например, с водителем дифференциала (на чертеже не показан). В качестве системы программного управления с магнитной записью может быть использована любая система, обеспечивающая запись и считывание сигналов независимо от скорости движения магнитного носителя записи, например фазовая система программного управления, или специальные головки, обеспечивающие возможность записи и считывания сигналов при переменной скорости носителя записи. В качестве магнитного носителя записи могут быть использованы или магнитный барабан, или магнитная лента с натяжным механизмом, или магнитная проволока. В качестве силового привода поворота колес могут быть использованы или электрический, или механический, или электрогидравлический, или электрогидромеханический. В качестве сумматоров могут быть использованы или электрические, или механические, или электромеханические суммирующие устройства. В качестве датчика угла складывания могут быть использованы или потенциометрические, или импульсные датчики угла.
Устройство работает следующим образом. При входе звена в поворот датчик 1 угла поворота фиксирует угол поворота передних колес тягача и посылает сигнал на вход
2 блока запаздывания 3. Блок 3 задерживает сигнал до того момента, когда задние колеса тягача придут в данную точку пути. В этот момент блок 3 запаздывания выдает сигнал с выхода 4 на вход 6 блока запаздывания 7 колес полуприцепа и на один из входов углов 5 сумматора. Сумматор 5 алгебраически складывает полученный сигнал с сигналом от датчика 8 и посылает суммарный сигнал на вход 10 блока 7 запаздывания и в силовой привод 9, который
поворачивает задние колеса тягача на соответствующий угол. Когда колеса полуприцепа придут в данную точку пути, блок 7 запаздывания выдает сигналы с выхода 11 на вход 12 блока 13 запаздывания и с выхода 14 на вход 16 и в силовой привод 15, который поворачивает колеса полуприцепа на соответствующий угол. Когда передние колеса прицеса придут в данную точку пути, блок 13 запаздывания выдает сигналы с выхода 19 на вход 20 блока 21 запаздывания
0 и с выхода 17 - в силовой привод 18, который поворачивает передние колеса прицепа на соответствующий угол. Когда задние колеса прицепа придут в данную точку пути, блок 2 запаздывания выдает сигнал с выхода 22 в силовой привод 23, который поворачивает задние колеса прицепа на соответствующий угол. Осуществляя такое управление в каждой точке криволинейного пути непрерывно или с малой дискретностью, устройство обеспечивает
0 движение всех последующих колес автопоезда по траектории движения передних колес тягача.
Формула изобретения
Устройство для управления колесами звеньев автопоезда по авт. св. СССР № 653163, отличающееся тем, что, с целью повыщения надежности работы, блоки за- паздывания последующих звеньев автопоезда выполнены двухканальными и соединены последовательно между собой, образуя два параллельных канала для управления задними и передними колесами звеньев, причем канал управления передниJ ми колесами соединен с выходом блока запаздывания первого звена, а канал управления задними колесами соединен с выходом сумматора углов.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 653163, кл. В 62 D 13/02, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления поворотом ведомого звена автопоезда | 1985 |
|
SU1311989A1 |
| Устройство для управления поворотом ведомых звеньев автопоезда | 1976 |
|
SU652019A1 |
| Устройство управления автопоездом | 1988 |
|
SU1655833A1 |
| Устройство для управления колесами звеньев автопоезда | 1977 |
|
SU710855A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПА ИЛИ ПОЛУПРИЦЕПА | 1967 |
|
SU223610A2 |
| Устройство для управления колесами звеньев автопоезда | 1980 |
|
SU867756A1 |
| Устройство для управления колесамиполуприцепа | 1970 |
|
SU509485A1 |
| БОЛЬШЕГРУЗНЫЙ АВТОПОЕЗД | 2003 |
|
RU2255018C1 |