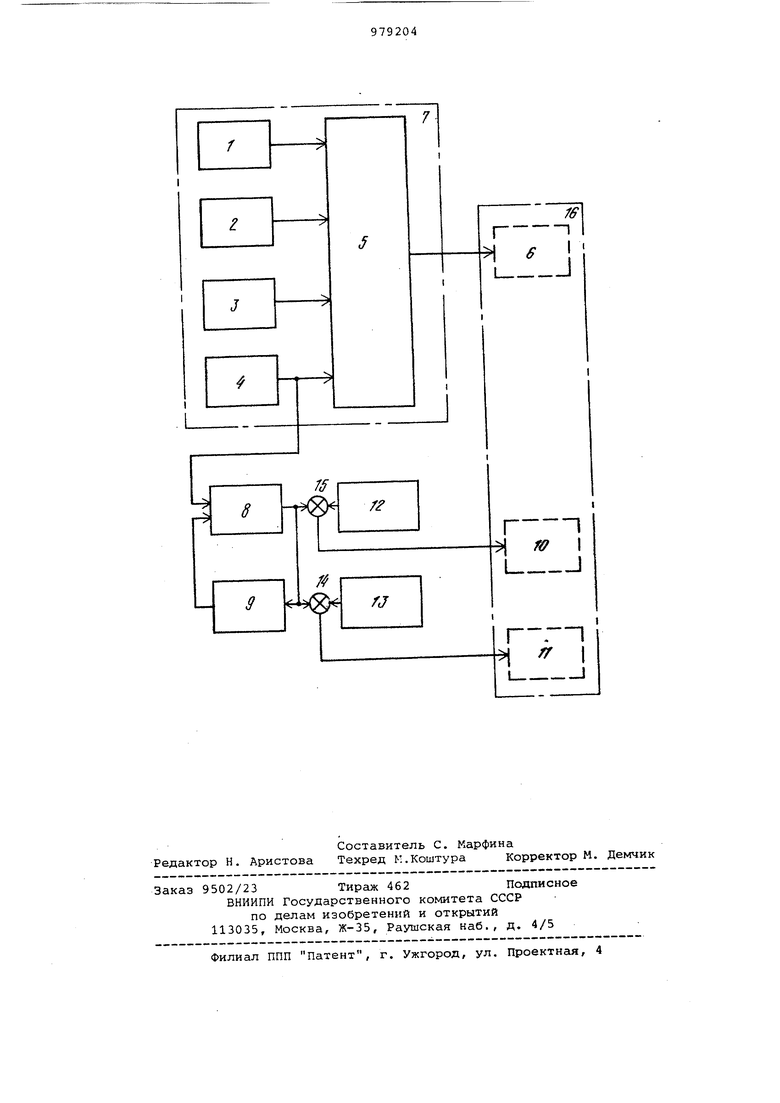
Изобретение относится к судострое нию, в частности к устройствам управ ления движением судна. Известно устройство управления движением судна, содержащее задатчик и датчик курса, подключенные соответственно к первому и второму входам суммирующего усилителя, выход которого соединен с входом рулевого привода судна, задатчики и регулято.ры оборотов правого и левого гребных винтов и датчик положения руля С13. Недостатком известного устройства является низкая надежность его ра боты. Цель изобретения - повышение надежности работы устройства. Для этого в устройство введены подключенный к третьему входу суммирующего усилителя датчик угловой ско рости судна, блок ограничения, блок интегрирования и первый и второй сум маторы, причем выход блока интеприрования связан соответственно с первыми входами сумматоров и с входом блока ограничения, выход задатчика оборотов правого гребного винта подключен к второму входу первого сумма тора, выход которого соединен с входом регулятора оборотов правого гребного винта, выход задатчика оборотов левого гребного винта подключен к второму входу второго сумматора, выход которого соединен с входом регулятора оборотов левого гребного винта, выход блока ограничения соединен с вторым входом блока интегрирования, а выход датчика положения руля подключен к четвертому входу суммирующего усилителя и к первому входу блока интегрирования, при этом первый вход первого сумматора выполнен инвертирующим. На чертеже приведена блок-схема предлагаемого устройства управления. Она состоит из задатчика 1 курса, датчика 2 курса, датчика 3 угловой скорости судна, датчика 4 положения руля, суммирующего усилителя 5, рулевого привода 6, блока 7 автоматического управления курсом судна, .блока 8 интегрирования, блока 9 ограничения, регулятора 10 оборотов гребного правого винта, регулятора 11 оборотов левого гребного винта, задатчик 12 и 13 оборотов правого винта и левого винта, сумматора 14, сумматора 15-с инвертируюа)лм входом
объекта 16 управления (движительного комплекса судна
Устройство работает следующим образом.
При отклонении судна от заданного курса под действием случайного возму;щения вырабатываются сигналы с датчиков 2, 3, 4, которые поступают на вход суммирующего усилителя 5, суммарный сигнал поступает на вход рулевого привода 6. Рулевой привод начинает перекладывать руль до тех пор, пока на выходе усилителя 5 суммарный сигнал не станет равным нулю
Сигнал, соответствующий углу отклонения руля, с датчика 4 одновременно поступает на вход блока 8, на выходе которого вырабатывается сигнал, величина которого формируется блоком 9 ограничения о Этот сигнал поступает согласно и инверсно через сумматоры 14 и 15 к регулятору 10. Оборотов правого гребного винта и к регулятору 11 оборотов левого гребного винта и приводит к увеличению подачи топлива, например, в левый главный двигатель (при изменении знака сигнала с блока 8 происходит противоположный разбаланс оборотов правого и левого гребных винтов)„
Процесс увеличения разбалансировки оборотов прекратится, когда на входе блока В будет сигнал, равный О, т.е. когда руль вернется в нулевое положение. В этом случае внешний момент, приложенный к судну, будет компенсироваться моментом, создаваемым различной тягой правого и левого гребных винтов.
Когда угол дрейфа, создаваемый отклонением руля, будет равен также О, то судно будет двигаться с минимальным лобовым сопротивлением. Это позволит сократить затраты топлива, повысить скорость хода и надежность работы устройства.
Формула изобретения
Устройство управления движением судна, содержащее задатчик и датчик курса, подключенные соответственно
к первому и второму входам суммирующего усилителя, выход которого соединен с входом рулевого привода судна, задатчики и регуляторы оборотов правого и левого гребных винтов и
0 датчик положения руля, отличающееся тем, что, с целью повышения надежности работы устройства, оно снабжено подключенным к третьему входу суммирующего усилителя датчиком
5 угловой скорости судна, блоком ограничения, блоком интегрирования и первым и вторым сумматорами, причем выход блока интегрирования связан соответственно с первыми входами
0 сумматоров и с входом блока ограничения, выход задатчика оборотов правого гребного винта подключен к второму- входу первого сумматора, выход которого соединен с входом регулятоC ра оборотов правого гребного винта, выход задатчика оборотов левого гребного винта подключен к второму входу второго сумматора, выход которого соединен с входом регулятора оборотов левого гребного винта, выход блока ограничения соединен с вторым входом блока интегрирования, а выход датчика положения руля подключен к четвертому входу суммирующего усилителя и к первому входу блока интегрирования, при этом первый вход первого сумматора выполнен инвертирующим.
Источники информации, 0 принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 749731, кл. В 63 Н 21/22, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2009 |
|
RU2388650C1 |
| Авторулевой | 1977 |
|
SU656028A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| Устройство для управления движением судна | 1983 |
|
SU1150155A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2133491C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВОЗМУЩЕНИЙ | 2012 |
|
RU2492105C1 |