(54) УСТРОЙСТВО ДЛЯ ПЕРЕНОСА ЗАГОТОВОК
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ГОРЯЧЕВЫСАДОЧНЬШ ДЛЯ ИЗГОТОВЛЕНИЯ ФАСОННЫХ ДЕТАЛЕЙ, НАПРИМЕР ГАЕК | 1965 |
|
SU176476A1 |
| Многопозиционный автомат для холодной объемной штамповки изделий | 1986 |
|
SU1424930A1 |
| Автомат для изготовления гвоздей | 1975 |
|
SU742013A1 |
| Механизм переноса заготовок многопозиционных высадочных автоматов | 1978 |
|
SU738742A1 |
| Устройство для переноса заготовок | 1985 |
|
SU1297975A1 |
| Автомат для высадки гвоздей | 1971 |
|
SU379119A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННОГО ВЫСАДОЧНОГО АВТОМАТАФОНДбис; | 1972 |
|
SU430933A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ НАПИЛЬНИКОВ | 1971 |
|
SU426735A1 |
| Автомат для изготовления волнистых пружинных шайб | 1977 |
|
SU657896A1 |
Изобретение относится к обработке металлов давлением и может быть использовано в многопозиционных ковочных машинах для переноса с одной позиции ковки на лругую преимущественно тяжелых заготовок.
Известно устройство для переноса заготовок с позиции на позицию, содержащее подвижную каретку, несущую захватные пальцы, и механизм разжима пальцев С Ч
Такое устройство предназначено для переноса заготовок только небольшого веса.
Известно также устройство для переноса заготовок, содержащее подвижную каретку, несущую валы с кривошипами на одном конце, установленные на осях захватные пальцы, связанные попарно зубчатым зацеплением, и кулачковый вал, кинематически связанный с кривошипами 2.
Известное устройство ненадежно при захвате и удержании тяжелых заготовок.
Цепью изобретения является повышение надежности работы устройства для переноса заготовок.
Поставленная цель достигается тем, что в устройстве для переноса заготовок, содержащем подвижную каретку, несущую валы с кривошипами на одном конце, установленные на осях захватные пальцы, связанные попарно зубчатым зацеплением, и кулачковый вал, кинематически связанный с кривошипами, кулачковый вал расположен на каретке, а каждая пара кривошипов связана с кулачковым валом через две
10 шарнирно соединеншле серьги.
Захватные пальцы могут быть смонтированы на каждой оси попарно, а расстояние между соседними осями, на которых установлены пальцы, не
15 менее чем в два раза превышает расстояние от оси до конца пальца.
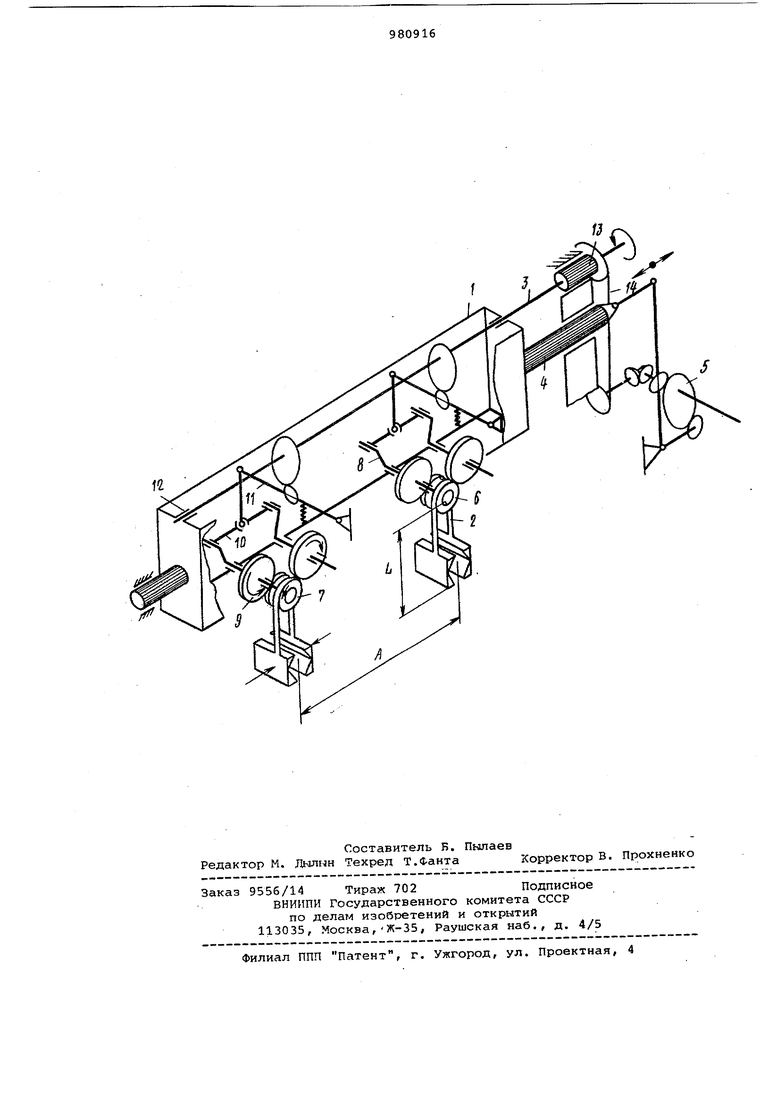
На чертеже изображена кинемати ческая схема предлагаемого устройства.
20
Устройство содержит каретку 1, на которой смонтированы захватные пальцы 2, и механизм зажима-разжима пальцев 2 с приводом от кулачкового вала 3. Каретка 1 снабжена направляющими 4, не которых она возможность возвратно-поступательного перемещения под воздействием приво- . да, представлякадего собой кулачковый механизм 5. Захватные пальцы 2 попарно смонтированы ступицами на оси 6,
общей для каждой пары. Каждая пара пальцев 2. в совокупности образует для захвата и удержания заготовок. На ступице каждого из пальцев 2 жестко закреплен зубчатый обод 7,
Механизм зажима-разжима пальцев (.{клещей) выполнен в виде двух аналоrpiMHf ix кригюшипных валов 8, на каждом из которых закреплено зубчатое колесо 9 J находящееся в зацеплении с одним из зубчатых ободов 7, Пальцы кривошипных валов 8 связан. межЛУ собой двумя, серьгами 10, концы которых шарнирно связаны между собой и с толкателем 11 кула 1кового механизма, кулачок которого закреплен на валу 3. (Две серьги 10, т-гарнирно связанные с кривои ипными пальцами, межд собой к с то.)7кателе.-; 11, образуют так чазмваемуп колечорычаж -;у1о систему) ,
Кулапютз-гй вдл 3 смот-ттирозан внутри кпретки 1 па опорах 12 j-i имеет возможность осевого перемегдекия вместе с кареткой 1 по цлицевому отверстип .втулки 13, которая цепной передачей 14 связана, с }залом кулачкового механизма 5.
Расстояние А, Mejigay соседними осями клещей не менее чем в два раза .П11ает длипу I, пальца 2 от центра оси 6 ,ио его конца.
Устройство работает с.те.дующим образом.
Из :исхо,1,гього положения каретка 1 начинает переме1.;аться влево по чертежу (на предыдуюие ГЮЗРГЦИИ) под действием приЕодноге кулачкового механизма 5, Гри этом кулачков лй вал 3 перемещается вместе с кареткой, скол зя в отверстии втулки 13 и врагигаясь вместе с ieft от цепной передачи 14, связанной с )1риводом каретки 1, Одновременно с началом движен -5я каретки 1 раскрываются .пальцы 2 до горизонтального положения, В .раскрытом виде пальцы 2 обеспечивают свободный проход пуансонов машины (на чертеже не показаны), которые в это время затолкнули заготовки в матрицы. Когда клеии подходят к предыдущим позициям, пуансоны отходят от матриц и следом происходит выталкивание заготовок из матриц. Одновременно с выталкиванием заготовок начинается их захват пальцами 2
и в конце выталкивания заготовки оказываются полностью зажатыми в клещах. Далее каретка 1 перемещается вправо по чертежу, перенося заготовки на последующие позиции машины. В момент
начала заталкивания заготовок в матрицы клещи раскрываются и каретка движется влево на предыдущие позиции, цикл повторяется.
Клещи зажимают заготовку, когда
обе серьги 10 становятся в распор. В этом положении усилием зажима нагружены только звенья 2, 7, 8, 9 и 10, а начиная с звена 11, вся остальная кинематика привода зажима
разгружена, так как кулачковый вал 3 смонтирован на опорах 12 самой каретки. .Направляющие 4 и привод каретки также разгружены от опрокидывающего момента в процессе зажима.
По сравнению с прототипом использование -данного изобретения позволяет повысить надежность работы устройства для переноса заготовок.
Формула изобретения
Источники информации. Принятые во внимание при экспертизе
(прототип).
