1
Изобретение относится к области кузнечнопрессового оборудования и может быть использовано во многопозиционных высадочных автоматах, изготавливающих, например, крепежные детали.
Известен механизм переноса многопозиционного высадочного автомата, содержапций подвижную каретку со смонтированными на ней подпружиненными захватами. Однако в этом механизме из-за вибрации пружины наблюдается выпадение заготовок из захватов.
Цель изобретения - снижение вибраций в захватах.
Предлагаемый механизм в отличие от известного снабжен смонтированными над пружинами каждого захвата на жестко закрепленных на каретке кронштейнах секторами, изготовленными из эластичного материала по профилю наружной поверхности пружины и контактирующими с ней в процессе работы.
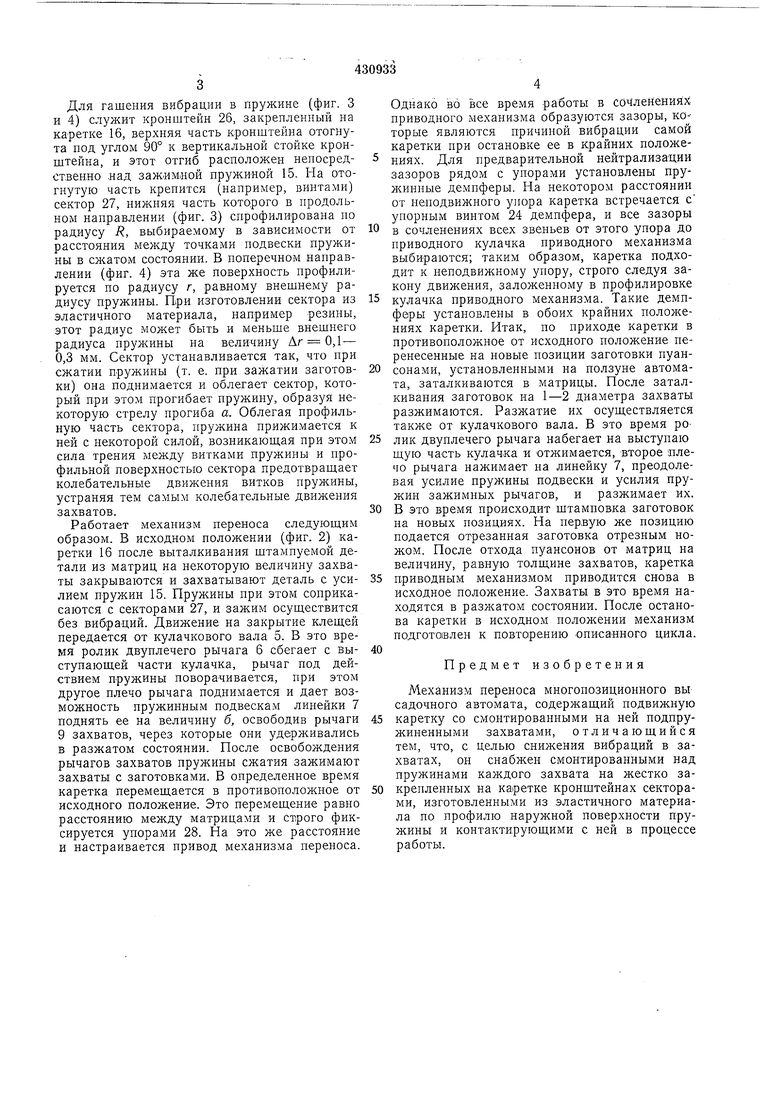
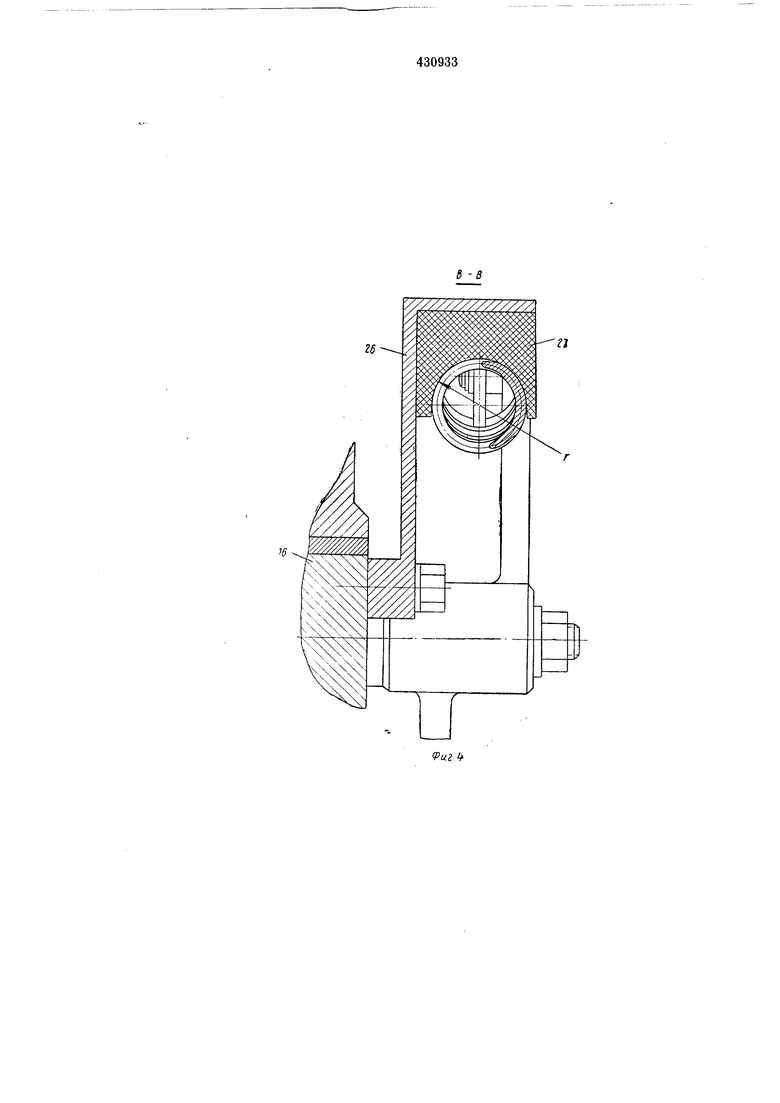
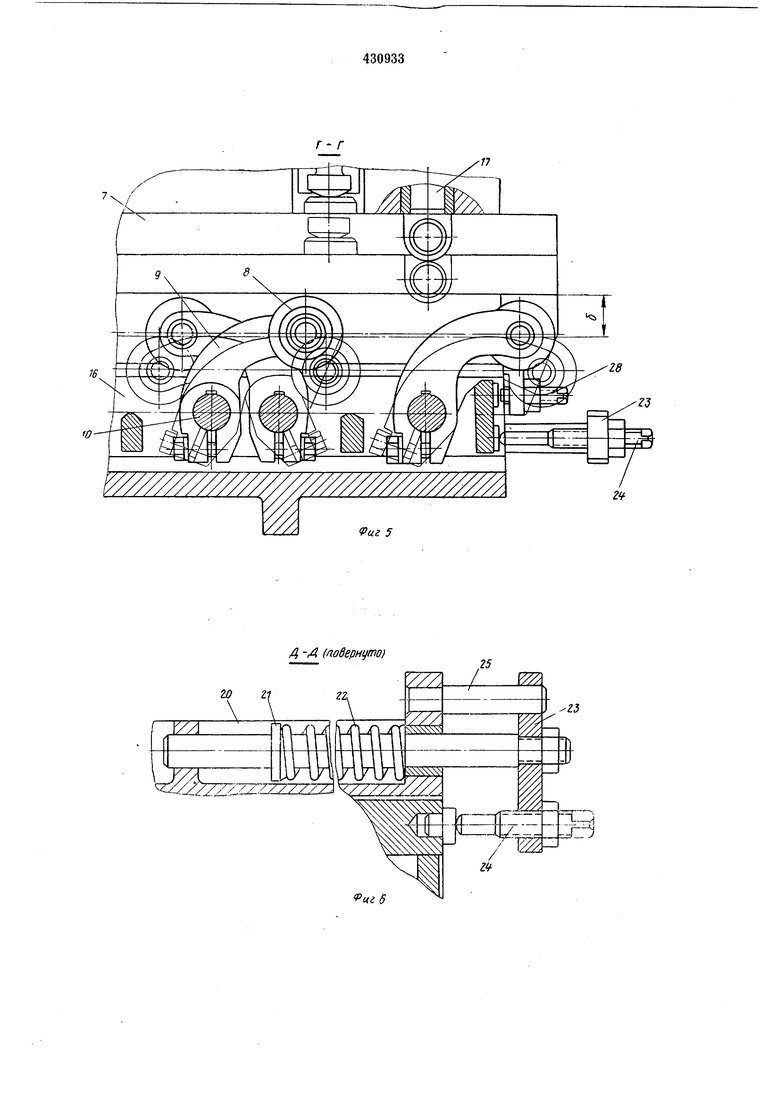
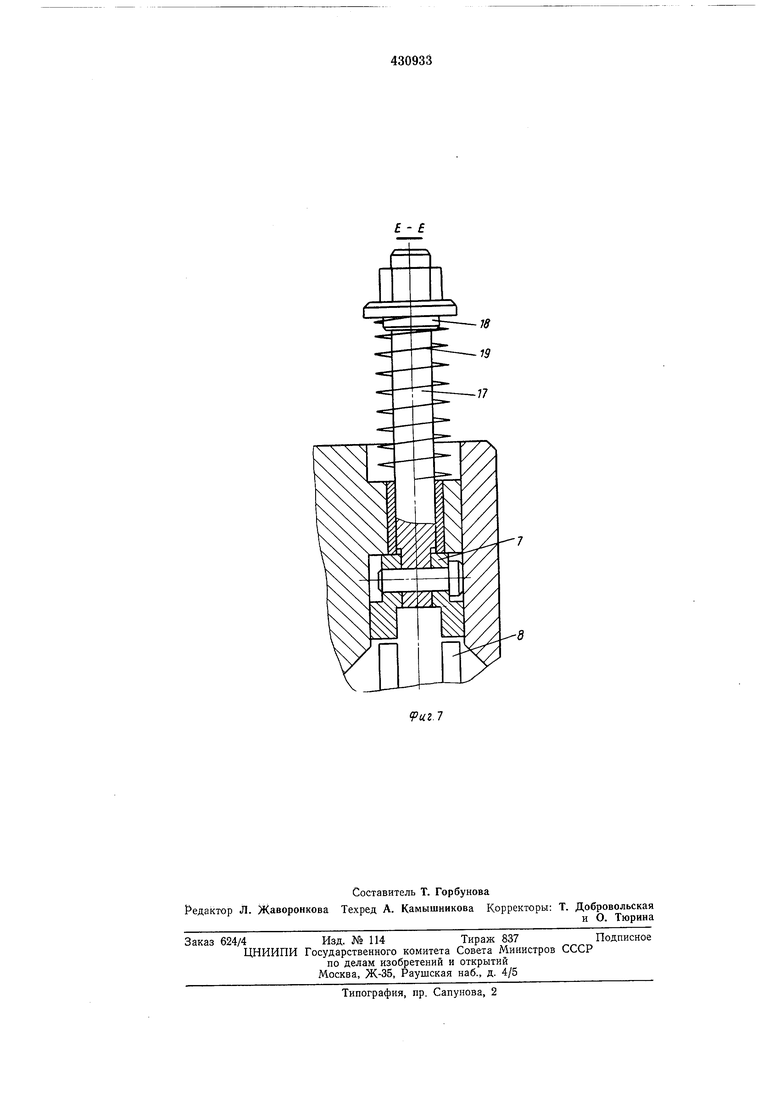
На фиг. 1 изображен описываемый механизм, вид сбоку; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - разрез по Б - Б на фиг. 1; на фиг. 4 - разрез по В - В на фиг. 3; на фиг. 5 - разрез по Г - Г на фиг. 1; на фиг. 6 - разрез по Д - Д на фиг. 1; на фиг. 7 - разрез по Е - Е на фиг. 2.
Корпус 1 механизма переноса болтами 2 крепится к станине 3 автомата 4. С одной стороны от платика крепления к станине в корпусе имеется расточка, через которую проходит кулачковый вал 5, приводящий в движение через двуплечий рычаг 6 линейку 7, взаимодействующую с роликами 8 рычагов 9, приводящих в движение (открывающих) оси 10, на которых посажены захваты 11; последние представляют собой двуплечие рычаги, одно плечо имеет зажимное устройство 12 для захвата, а другое плечо имеет ось 13, на которую через серьгу 14 одним концом подвешивается зажимная пружина 15, а другой конец пружины через такую же подвеску соединяется с одноименным плечом другого захвата. Оси вращения захватов располагаются в подщипниках каретки 16, которая в свою очередь размещается на направляющих корпуса 1. В верхней части корпуса имеются вырезы для размещения нажимного плеча двуплечего рычага 6. Здесь же размещена нажимная линейка 7, которая через две пружинные подвески (фиг. 7), состоящие из стержня 17 с буртом 18 и пружины 19, все время притягивается кверху. В нижней части корпуса имеются специальные расточки для размещения демпфирующего устройства (фиг. 6), состоящего из штока 20 с опорной шайбой 21 для пружины 22. На конце щтока имеется планка 23, один конец которой с упорными винтами 24 взаимодействует с кареткой, а другой конец с отверстием скользит по фиксатору 25.
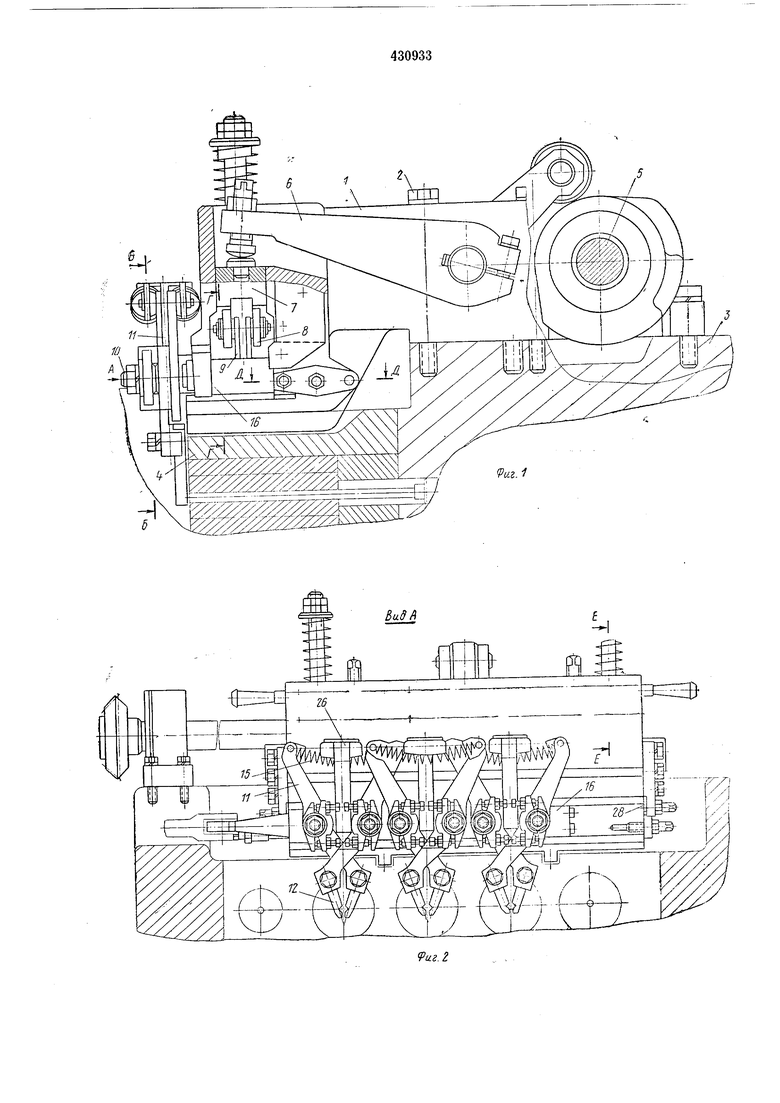
Для гашения вибрации в пружине (фиг. 3 и 4) служит кронштейн 26, закрепленный на каретке 16, верхняя часть кронштейна отогнута под углом 90° к вертикальной стойке кронштейна, и этот отгиб расположен непосредственно .над заЖИМиой пруж,иной 15. На отогнутую часть крепится (например, винтами) сектор 27, нижняя часть которого в продольном направлении (фиг. 3) спрофилирована по радиусу R, выбираемому в зависимости от расстояния меледу точками подвески пружины в сжатом состоянии. В поперечном направлении (фиг. 4) эта же поверхность профилируется по радиусу г, равному внешнему радиусу пружины. При изготовлении сектора из эластичного материала, например резины, этот радиус может быть и меньше внешнего радиуса на величину Дг 0,1 - 0,3 мм. Сектор устанавливается так, что при сжатии пружины (т. е. при зажатии заготовки) она поднимается и облегает сектор, который при этом прогибает пружину, образуя некоторую стрелу прогиба а. Облегая профильную часть сектора, пружина нрижимается к ней с некоторой силой, возникаюш,ая при этом сила трения между витками пружины и профильной поверхностью сектора предотвраш,ает колебательные движения витков пружины, устраняя тем самым колебательные двнжения захватов.
Работает механизм переноса следуюш,им образом. В исходном положении (фиг. 2) каретки 16 после выталкивания штампуемой детали из матриц на некоторую величину захваты закрываются и захватывают деталь с усилием пружин 15. Пружины нри этом соприкасаются с секторами 27, и зажим осуществится без вибраций. Движение на закрытие клещей передается от кулачкового вала 5. В это время ролик двуплечего рычага 6 сбегает с выступающей части кулачка, рычаг под действием пружины поворачивается, при этом другое плечо рычага поднимается и дает возможность пружинным подвескам линейки 7 поднять ее на величину б, освободив рычаги 9 захватов, через которые они удерживались в разжатом состоянии. После освобождения рычагов захватов пружины сжатия зажимают захваты с заготовками. В определенное время каретка перемещается в нротивоположное от исходного положение. Это перемещение равно расстоянию между матрицами и строго фиксируется упорами 28. На это же расстояние и настраивается привод механизма переноса.
Однако во все время работы в сочлененияхприводного механизма образуются зазоры, которые являются причиной вибрации самой каретки при остановке ее в крайних положениях. Для предварительной нейтрализации зазоров рядом с упорами установлены пружинные демпферы. На некотором расстоянии от неподвижного упора каретка встречается с упорным винтом 24 демпфера, и все зазоры
в сочленениях всех звеньев от этого упора до приводного кулачка приводного механизма выбираются; таким образом, каретка подходит к неподвижному упору, строго следуя закону движения, заложенному в профилировке
кулачка приводного механизма. Такие демпферы установлены в обоих крайних положениях каретки. Итак, по приходе каретки в противоположное от исходного положение перенесенные на новые позиции заготовки пуансонами, установленными на ползуне автомата, заталкиваются в матрицы. После заталкивания заготовок на 1-2 диаметра захваты разжимаются. Разжатие их осуществляется также от кулачкового вала. В это время ролик двуплечего рычага набегает на выступаю щую часть кулачка и отжимается, второе плечо рычага нажимает на линейку 7, преодолевая усилие пружины подвески и усилия пружин зажимных рычагов, и разжимает их.
В это время происходит штамповка заготовок на новых позициях. На первую же позицию подается отрезанная заготовка отрезным ножом. После отхода пуансонов от матриц на величину, равную толщине захватов, каретка
приводным механизмом приводится снова в исходное положение. Захваты в это время находятся в разжатом состоянии. После останова каретки в исходном положении механизм подготовлен к повторению описанного цикла.
Предмет изобретения
Механизм переноса многонозиционного вы садочного автомата, содержащий подвижную
каретку со смонтированными на ней подпружиненными захватами, отличающийся тем, что, с целью снижения вибраций в захватах, он снабжен смонтированными над пружинами каждого захвата на жестко закрепленных на каретке кронщтейнах секторами, изготовленными из эластичного материала по профилю наружной поверхности пружины и контактирующими с ней в процессе работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННЫХ ХОЛОДНОВЫСАДОЧНЫХ АВТОМАТОВ | 1973 |
|
SU366912A1 |
| АВТОМАТ ГОРЯЧЕВЫСАДОЧНЬШ ДЛЯ ИЗГОТОВЛЕНИЯ ФАСОННЫХ ДЕТАЛЕЙ, НАПРИМЕР ГАЕК | 1965 |
|
SU176476A1 |
| Устройство для переноса заготовок в многопозиционном высадочном автомате | 1980 |
|
SU958031A1 |
| Механизм переноса многопозиционного высадочного автомата | 1986 |
|
SU1442321A1 |
| МНОГОПОЗИЦИОННЫЙ ХОЛОДНО-ВЫСАДОЧНЫЙ АВТОМАТ | 1973 |
|
SU378278A1 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |
| Устройство для переноса заготовок к многопозиционному высадочному автомату | 1976 |
|
SU647053A1 |
| АВТОМАТ ДЛЯ ВЫСАДКИ ГВОЗДЕЙ | 1973 |
|
SU366659A1 |
| Устройство для высадки | 1981 |
|
SU996027A1 |
| Механизм переноса заготовок | 1976 |
|
SU664738A1 |
и
Д -А (повернуто)
гз
Рт5
