( S) КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Тягово-несущий орган конвейера | 1979 |
|
SU870265A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Шаговый конвейер для перемещенияшТучНыХ КРупНОгАбАРиТНыХ гРузОВ | 1979 |
|
SU816886A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| Цепной конвейер | 1980 |
|
SU865723A2 |
| Цепной конвейер-накопитель | 1982 |
|
SU1063731A1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Устройство для загрузки конвейера штучными грузами | 1980 |
|
SU945019A1 |
| ЦЕПНОЙ ТРАНСПОРТЁР | 2001 |
|
RU2215679C2 |
Изобретение относится к непрерыв ному транспорту, в частности, к цеп ным конвейерам. Известно устройство цепного конвейера, включающее тяговый орган с роликовым полотном, огиб.ающим приводные и натяжные звездочки р J. Недостатком этого устройства является невозможность шагового перемещения штучных грузов. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство, включающее цепной тяговый орган со ступенчатыми катками и распо ложенные вдоль него секции, выполненные в виде толкающих роликов, ка дый из которых установлен с возможностью взаимодействия с соответству ющим ступенчатым катком 2 1. Недостатком известного устройства является ограниченность технол гических возможностей, в частности невозможность последовательно шагового перемещения штучных грузов. Цель изобретения - расширение технологических возможностей конвейера. Указанная цель достигается тем, что конвейер, включающий цепной тяговый орган со ступенчатыми катками и расположенные вдоль него секции, выполненные в виде толкающих роликов, каждый из которых установлен с возможностью взаимодействия с соответствующим ступенчатым катком, он снабжен установленным вдоль конвейера Настилом и размещенными по обе стороны каждой секции подъемными приспособлениями, каждое из которых выполнено в виде подъемных роликов и закрепленных на цепи с возможностью взаимодействия с ними дополнительных катков, кроме того, диаметр каждого дополнительного катка равен диаметру соответствующего подъемного ролика.
39811
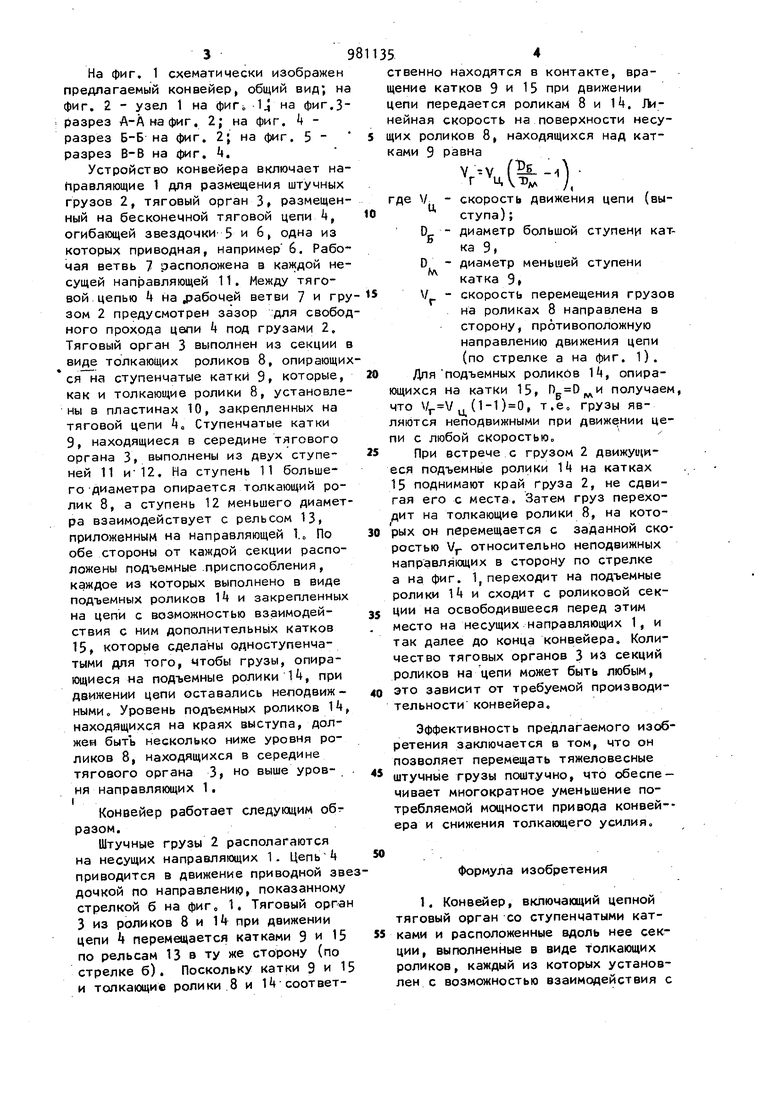
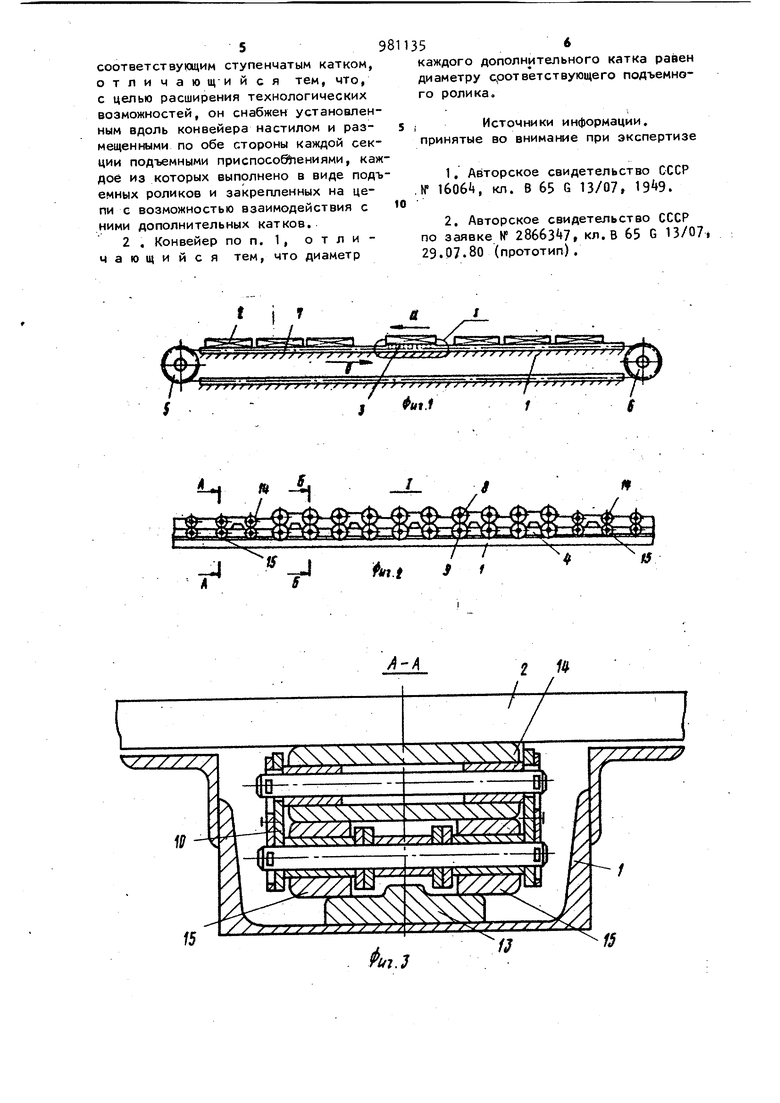
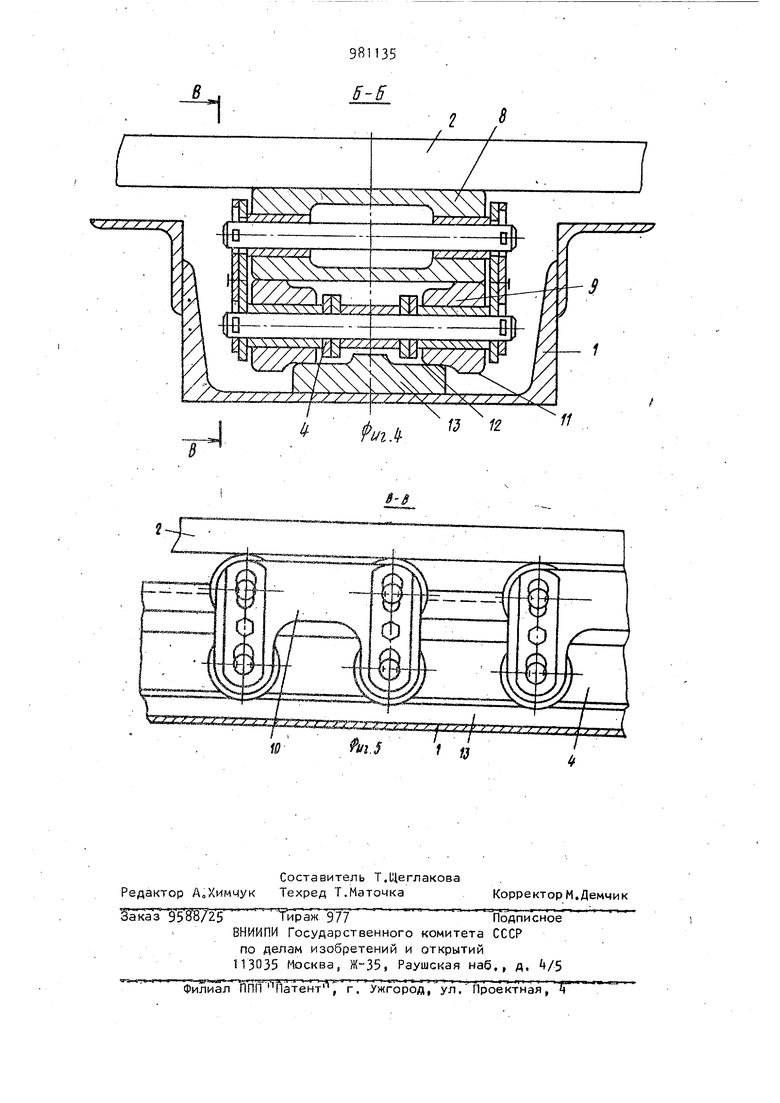
На фиг. 1 схематически изображен предлагаемый конвейер, общий вид; на фиг. 2 - узел 1 на фигь -Ij на фиг.Зразрез А-Анафиг, 2; на фиг. 4 разрез Б-Б на фиг. 2; на фиг. 5 - 5 разрез В-В на фиг. А.
Устройство конвейера включает направляющие 1 для размещения штучных грузов 2, тяговый орган 3 размещенный на бесконечной тяговой цепи 4, О огибающей звездочки 5 и 6, одна из которых приводная, например 6. Рабочая ветвь 7 расположена в каждой несущей направляющей 11. Между тяговой цепью на забочей ветви 7 и гру- зом 2 предусмотрен зазор для свободного прохода цепи k под грузами 2. Тяговый орган 3 выполнен из секции в толкающих роликов 8, опирающихся на ступенчатые катки 9, которые, 20 как и толкающие ролики 8, установлены в пластинах 10, закрепленных на тяговой цепи с Ступенчатые катки 9, находящиеся в середине тягового органа 3 выполнены из двух ступе- 25 ней 11 И12. На ступень 11 большего -диаметра опирается толкающий ролик 8, а ступень 12 меньшего диаметра взаимодействует с рельсом 13, приложенным на направляющей I. По 30 обе стороны от каждой секции расположены подъемные .приспособления, каждое из которых выполнено в виде подъемных роликов }k и закрепленных на цепи с возможностью взаимодей- 35 ствия с ним дополнительных катков 15, которые сделаны одноступенчатыми для того, чтобы грузы, опирающиеся на подъемные ролики It, при движении цепи оставались неподвиж- до нымио Уровень подъемных роликов 1, находящихся на краях выступа, должеи быть несколько ниже уровня роликов 8, находящихся в середине тягового органа 3, но выше уров- 5
ня направляющих 1. I
Конвейер работает следующим обг
разом.
Штучные грузы 2 располагаются на несущих направляющих 1. Цепь 50 приводится в движение приводной звездочкой по направлени19, показанному стрелкой б на фиг 1. Тяговый орган 3 из роликов 8 и Т при движении цепи k перемещается катками 9 и 15 55 по рельсам 13 в ту же сторону (по стрелке б). Поскольку катки 9 и 15 и толкающие ролики 8 и 14-соответ354
ственно находятся в контакте, вращение катков 9 и 15 при движении цепи передается роликам 8 и 14. Линейная скорость на поверхности несущих роликов 8, находящихся над катками 9 равна
V V (-Л V тз )
где V. - скорость движения цепи (выЦ
ступа);
D - диаметр большой ступени ка ка 9,
D - диаметр меньшей ступени гл - катка 9
V - скорость перемещения грузо на роликах 8 направлена в сторону, противоположную направлению движения цепи (по стрелке а на фиг. 1). Дляподъемных роликбв 1Ц, опирающихся на катки 15, получае что jj(1-1) 0, т.е. грузы являются неподвижными при движении цепи с любой скоростью
При встрече с грузом 2 движущиеся подъемные ролики }k на катках 15 поднимают край груза 2, не сдвигая его с места. Затем груз перехо дит на толкающие ролики 8, на которых он перемещается с заданной скоростью V относительно неподвижных направляющих в сторону по стрелке а на фиг. 1, переходит на подъемные ролики 1 и сходит с роликовой секции на освободившееся перед этим место на несущих направляющих 1, и так далее до конца конвейера. Количество тяговых органов 3 из секций роликов на цепи может быть любым, это зависит от требуемой производительности конвейера.
Эффективность предлагаемого изобретения заключается в том, что он позволяет перемещать тяжеловесные штучные грузы поштучно, что обеспечивает многократное уменьшение потребляемой мощности привода конвейера и снижения толкающего усилия.
Формула изобретения
5981135
соответствувдцим ступенчатым катком,каждого дополнительного катка равен
отличаю щ-ийся тем, что,диаметру срответствующего подъемнос целью расширения технологическихго ролика,
возможностей, он снабжен установленным вдоль конвейера настилом и раз- 5 iИсточники информации, мещенными по обе стороны каждой сек- принятые во внимание при экспертизе ции подъемными приспособ41ениями, каждое из которых выполнено в виде подъ- 1, Авторское свидетельство СССР емных роликов и закрепленных на це- . № 6Q6k, кл. В 65 G 13/07 . пи с возможностью взаимодействия с ними дополнительных катков. 2. Авторское свидетельство СССР
чающийся тем, что диаметр29.07.80 (прототип).
