(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический клещевой захват для штучных грузов | 1980 |
|
SU874573A1 |
| Грузозахватное устройство | 1983 |
|
SU1118600A1 |
| Захват-кантователь | 1979 |
|
SU823260A1 |
| Механизм фиксации грузозахватного устройства | 1982 |
|
SU1093676A1 |
| Автоматический захват | 1981 |
|
SU1009963A1 |
| Автоматический захват для штучных грузов | 1982 |
|
SU1062167A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Грузозахватное устройство | 1983 |
|
SU1105441A1 |
| Захватное устройство для изделий с центральным отверстием | 1988 |
|
SU1557059A2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ | 2015 |
|
RU2595204C1 |

Изобретение относился к подъемно-транспортному оборудованию, в частности к грузозахватньгм устройствам.
Известно грузозахватное устройство, содержащее шарнирно соединенные между собой посредством оси и шарнирно связанные посредством верхних и нижних тяг с серьгой дляhнавешивания на крюк грузоподъемной машины захватные двуплечие , взаимодействующие с нижними тягами, и механизм фиксации захватных рычагов в раскрытом положении, включающий в себя прикрепленные по одному к каждой нижней тяге крюки 13.
Однако известное устройство не удобно в эксплуатации из-за больших габаритов его в раскрытом состоянии, вследствие чего затруднена его работа в ограниченном пространстве.
Цель изобретения - повышение удобства в эксплуатации.
Цель достигается тем, что нижние тяги смонтированы на оси захватных рычагов, а механизм фиксации снабжен свободно установленными на той же оси храповыми колесами, взаимодей|ствующими с каждым из них подпружиненными собачками, одна из которых
смонтирована на нижней тяге, а другая - на нижнем плече соответствую ющего захватного рычага,закрепленными Ма храповых колесах кулачками и смонтированными на нижних тягах подпружиненными штырями, взаимодей- . ствующими одними своими концами с кулачками, а другими - с крюками с возможностью поворота, при этом
10 захватные рычаги и храповые колеса расположены на оси с противоположных сторон относительно нижних тяг.
Такое выполнение устройства повышает удобство его в эксплуатации
15 за счет возможности работы в ограниченном прюстранстве.
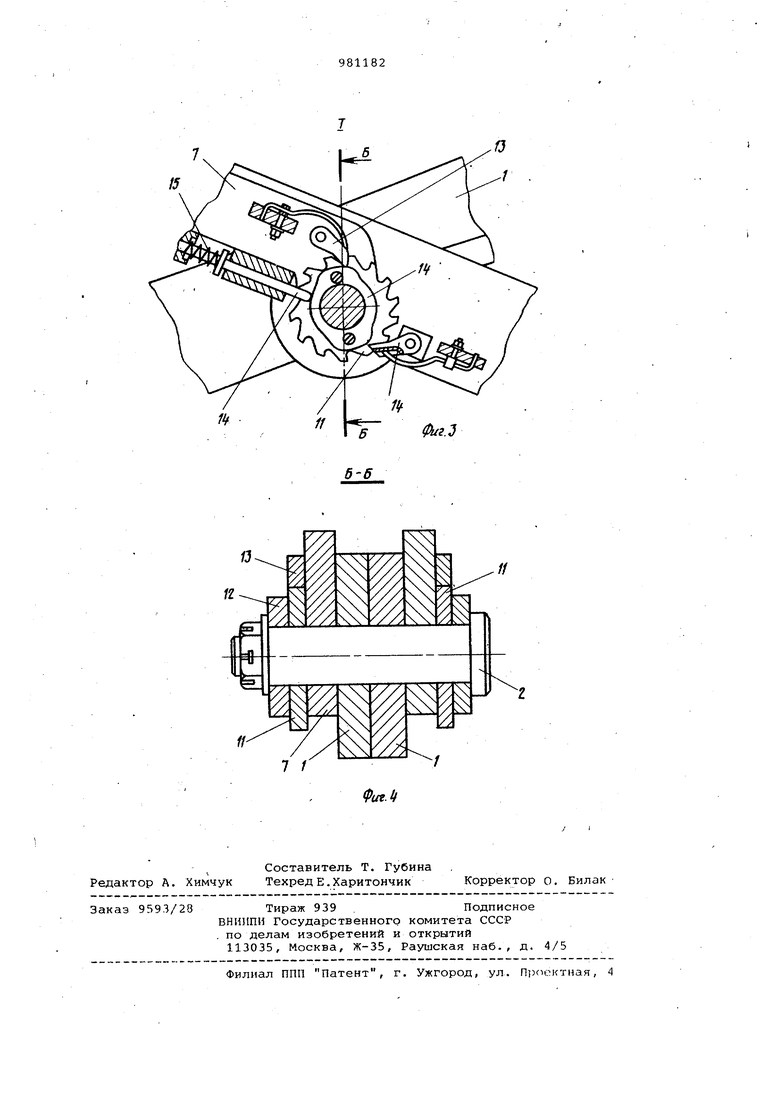
На фиг. 1 схематически изображено предлагаемое захватное устройство в закрытом положении, общий вид;
20 на фиг. 2 - вид А ни фиг. 1; на фиг. 3 - узел 1 на фиг. 1; на фиг. 4сечение Б-Б на фиг. 3.
Грузозахватное устройство содержит двуплечие захватные рычаги 1, 25 шарнирно соединенные между собой посредством оси 2, к которым жестко прикреплены сдвоенные 3 с запрессованными осями 4 и захватные элементы 5. Захватные рычаги шарнир30 ио связаны посредством верхниз б и смонтированных на оси 2 захватных рычагов нижних тяг 7 с серьгой 8 для навешивания на крюк грузоподъем ной машины. Верхние плечи захватных рычагов имеют упоры 9 для взаимодействия с нижними тягами 7.. Механизм фиксации захватных рычагов в раскрытом положении содержит прикрепленные по одному к верхнему концу каждой нижней тяги крюки 10, взаимодействующие с осями 4 захватных рычагов свободно установленные на оси 2 храповые колеса 11 с жестко закрепленными на них кулачками 12, подпружиненные собачки 13 и 14, смонтированные на нижних тягах штыри 15 поджатые в сторону кулачков пружин ми 16 и взаимодействующие одними св ими концами с кулачками, а другими - с крюками. Подпружиненные собачки 13 установлены на нижних тягах 7, а собачки 14 смонтированы на нижних плечах захватных рычагов Устройство работает следующим образом. , в раскрытом положении захватные рычаги 1 зафиксированы крюками 10, взаимодействующими с осями 4. При опускании крюка грузоподъемной машины вниз серьга 8 с тягами б и 7 опускается вниз. При этом собачки 13 свободно скользят по зубьям хра повых колес 11. При подъеме серьги 8 вверх нижние тяги 7, поднимаясь вверх поворачивают храповые колеса 11 на угол 90°, а вместе с ними и кулачки 12, взаимодействующие со штырями 15, которые поворачивают кр ки 10, освобождающие захватные рычаги 1. При дальнейшем подъеме сер ги 8 нижние тяги 7 взаимодействуют с упорами 9 захватных рычагов 1, поворачивая последние. Происходит захват груза. При повторном опускании серьги тяги 6 и 7 опустятся вниз не поворачивая храповые колеса 11 за сч того, что собачки 13 свободно скол зят по зубьям колес. При последующем подъеме храповы колеса с кулачками на угол 90°, освобождая крюки 10, которые поворачиваются и замыкают захватные рычаги 1, фиксируя их в раскрытом положении. Затем цикл работы повторяется. Предлагаемая конструкция грузозахватного устройства более удоб(а в эксплуатации по сравнению с извест-ной эа счет обеспечения возможности его работы в ограниченном пространстве. Формула изобретения Грузозахватное устройство, содержащее шарнирно соединенные между собой посредством оси и шарнирно связанные посредством верхних и нижних тяг с серьгой для навешивания на крюк грузоподъемной машины захватные двуплечие рычаги, взаимодействующие с нижними тягами, и механизм фиксации рычагов в раскрытом положении, включающий в себя прикрепленные по одному к каждой нижней тяге крюки, отличающееся тем, что, с целью повышения удобства в эксплуатации, нижние тяги смонтированы на оси захватных рычагов, а механизм фиксации снабжен свободно установленными на той же оси храповыми колесами, взаимодействующими с каждым из них с подпружиненными собачками, одна из которых смонтирована на нижней тяге, а другая - на нижнем плече соответствующего захватного рычага, закрепленными на храповых колесах кулачками и смонтированными на нижних тягах подпружиненными штырями, взаимодействующими одними своими концами с кулачками, а другими - с крюками, закрепп ленными на нижних тягах с возможностью поворота, при этом захватные рычаги и храповые колеса расположены на оси с противоположных сторон относи,тельно нижних тяг. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 213313, кл. В 66 С 1/38, 1967. i o
15
Ik
13
П
ff
Фиг.:5
ff
