1
Изобретение огносигся к усгройсгвам для нанесения гальванических и химических покрытий и можег быть использовано в любой отрасли гальванических произволе гв.
Известны авгооперагоры портального гипа для обслуживания гальванических и химических линий, содержащие вергика ьную и горизонтальную направляющие, тележки для горизонтального и вертикального перемаиения с приводами и механизм прижима подвески 3
Этот автооператор предназначен для обслужичанйя только одного типа линий с определенной шириной подкранового пути.
Конструкция подхвата не обеспечивает надежности захвата штанги в случае смещения ее ог продольной оси линии расположения ванн. Не исключена возможность столкновения подхвата с кронштейнами штанги.
Наиболее близким к предлагаемому изобретению является устройство для
перемещения изделий через ванны гальванической линии, включа1сяцее- корпус с вертикальными направляющими, в которых размацен подъемно-опускной орган с усгаиовленными на нем ведущей и ведомой звездочками и перекинутой через них цепью, привод 2 .
Указанное устройство не может быть использовано для обслуживания линий, отличающихся шириной колеи подкранового пути. Подхваты имеют сложную конструкцию, не исключена возможность столкновения с кронштейнами штанги, чго снижает надежность работы устройства. Цель изобретения - повышение универсальности автооператороЬ для гальванических и химических линий посредством обеспечения воиуложности обслуживания линий с разной шириной подкранового пугн и 20 повышения надежносгн.
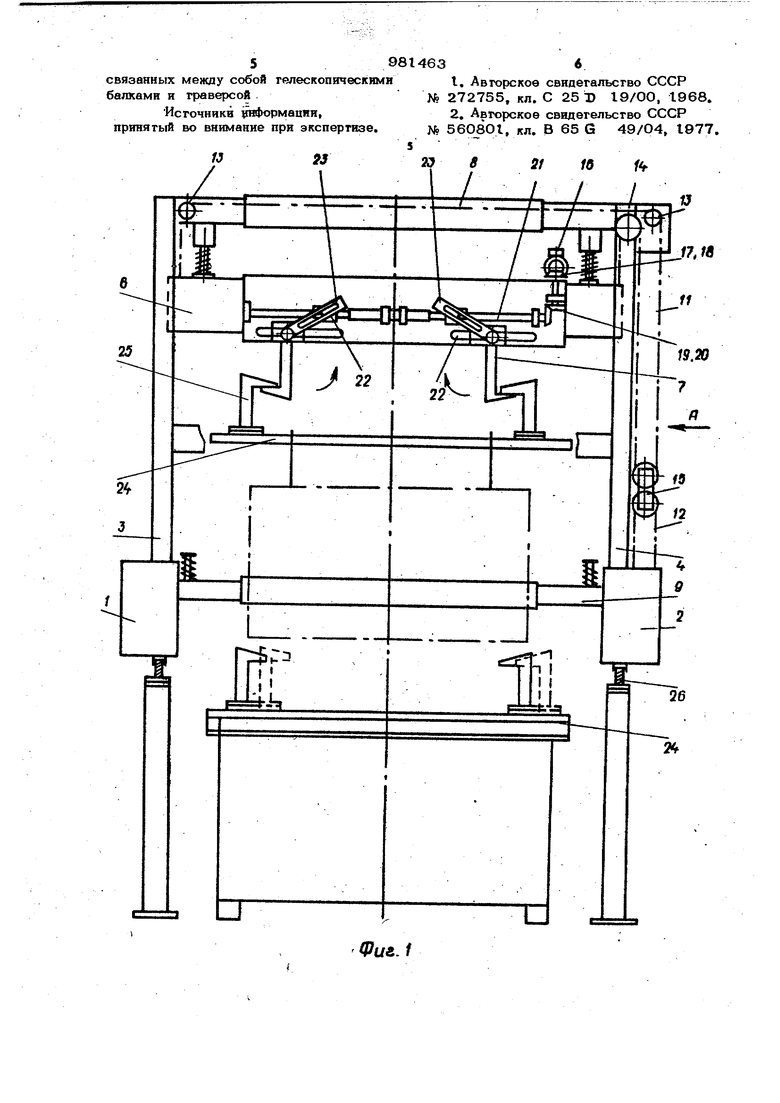
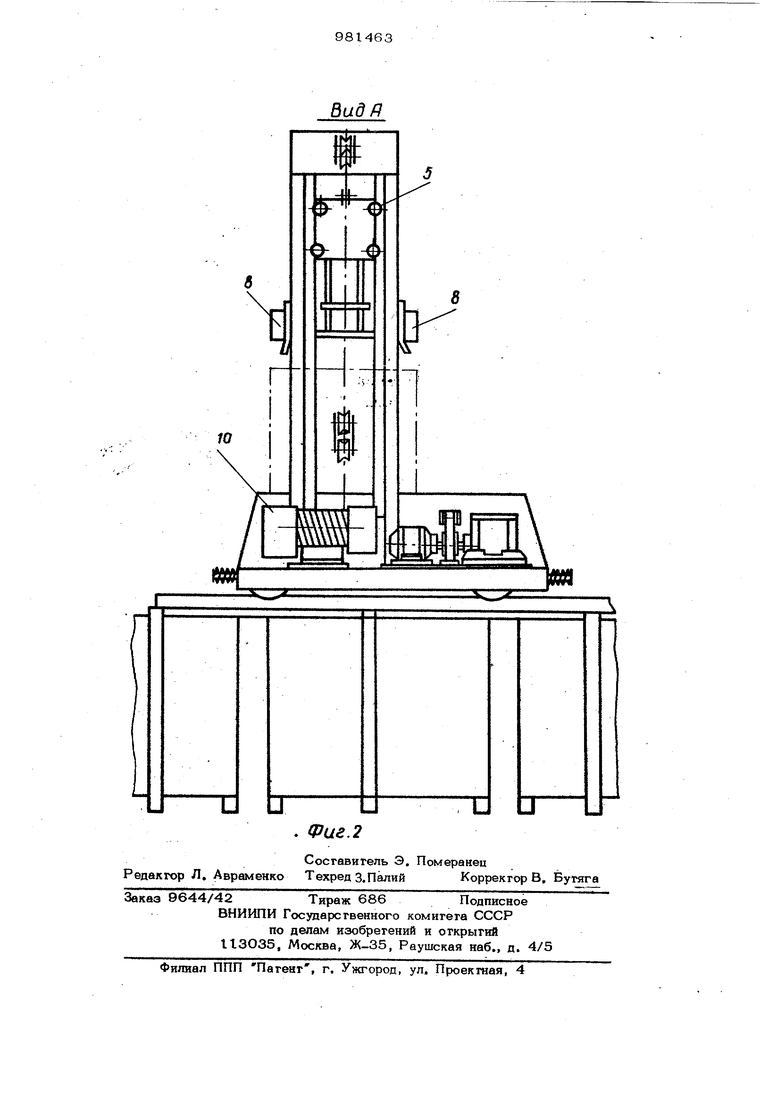
Поставленная цель достигается тем, что автооператор для гальванических я химических линий, содержащий приводные платформы с расположенными на них вертикальными направляющими, выполнен в виде двух приводных плагформ и вер гикальных направляющих, связанных между собой телескопическими балками и траверсой, . На фиг. I показан автооператор, вид спереди на фиг. 2 - вид по стрелке А. Автооперагор в виде двух приводных платформ i и 2 для горизонтального перемещения, на которых размешены вертикальные направляющие 3 и 4, по которым пера ещается с помощью роликов 5 телескопическая траверса 6 с поворотными грузозахватами 7. Приводные платформы I и 2 и вертикальные направляющие 3 и 4, по которым перемеш ется с помощью роликов 5 телескопическа траверса 6 с поворотными грузозахвагами 7. Приводные платформы I и 2 я вертикал ные направляющие 3 и 4 соединены меж собой телескопическими балками 8 и 9. Телескопическая TjiaBepca 6 по верти кальным направляющим 3 и 4 перемешается механизмом подъема 10 с помощью тросов II и 12, перекинутьтх через блоки 13,14. и 15. Поворотные грузозахваты 7 поворачиваются механизмом поворота 16 посредством конических шестерен 17, 18,19 и 2О и винта 21 по которому перемоцаются маточные гайки 22, соединенные цапфами с рычагами 23 грузозахватов 7. Грузозахваты 7 захватывают при подъеме щтангу 24 кронштейны 25. Автооператор установле на подкрановом пути 26. Работает автооператор следукмиим образом. Приводные платформы I и 2 вместе с вертикальными направляющими 3 и 4 установлены на подкрановом пути 26 и по ширине колеи выставляются- телескопическими балками 8 и 9 и траверсой 6 и фиксируются болтами. По кронштейнам 25 штанги 24 устанавливаются оси грузозахватов 7 и закрепляются бол тами. Автооператор работает по заданной программе. Исходное положение автоопе рагора на познции,загрузки. Траверса 6 находится в нижнем крайнем положении, Грузозахваты 7 раскрыты. . При нажатии кнопки Пуск включает ся механизм подъема Ю. Телескопичес кая траверса 6 поднимается вверх, а грузозахвагы 7 подхватывают шгангу 24. При полном подъеме телескопической траверсы 6 в верхнее крайнее положение срабатывает датчик, который выключает механизм подъема 10 и включает приВОДЫ платформ I и 2. Автооператор пере- . мешается к заданной позиции, при подходе к ней срабатывает датчик переключения скоростей, автооператор на малой скорости подходит к заданной позиции. При дальнейшем его движении считывающая линейки на позиции и датчик точного останова на автооператоре срабатывают и выключают приводы платформ I и 2 горизонтального перемещения. Автооператор останавливается и от датчика.полного останова включается привод механизма подъема 10, а раздвижная траверса 6 опускается в нижнее .крайнее положение. В нижнем крайнем положении раздвижная траверса 6 воздействует на датчик, который одновременно выключает механизм подъема Ю и включает механизм поворота 16 грузозахватов 7. Поворот грузозахвагов 7 передается от двигателя механизма пово- рота 16 через конические шестерни 17,18, 19 и 2О и винт 21, по которому перемацаются маточные гайки 22 с цапфами, которые соединены с рычагами 23 грузозахватов 7. -. При дальнейшем повороте рычагов 23 грузозахваты прижимаются к нижней плите раздвижной траверсы 6. Датчик, контролирующий положение грузозахвата 7, выключает . механизм поворота 16. Автооператор готов к движению к следующей позиции. В дальнейшем цикл работы повторяется в той же послед ова тельное ти. Автооператор быстро выставляется по ширине колеи подкранового пути, а телескопические балки обеспечивают надежную жесткость связи приводных плагформ и вертикальных направляющих. Телескопическая траверса с поворотными грузозахватами под нагрузкой обладает достаточной жесткостью и свободно перемешается по вертикальным направляющим. Привод поворота обеспечивает быстрый поворот грузозахватов, а Грузозахваты надежно захватывают при переносе штангу с изделиями. Формула изобретения Автооператор для гальванических и химических линий, содержащий приводные платформы с расположенными на них вертикальными направляющими, траверсу с грузозахвагами и механизм подъема, отличающийся тетл, что, с целью повышения его универсальности посредством обеспечения возможности обслуживания лииий с разной шириной подкранового пути и повышения надежности, он вьшолнен в виде двух приводных платформ и верШкальных направляющих.
5981463
связанных между собой телескопическимиI. Авторское свндегальсгво СССР
балками и граверсой№ 272755, кп. С 25 D 19/00.1968,
Источники 1|йв|юрмации,2, Авторское свидетельство СССР
принятый во внимание при экспертизе.№ , кл. В 65 G 49/О4, 1977.
s X 8
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для гальваноавто-MATOB | 1979 |
|
SU850761A1 |
| Гибкая автоматическая гальваническая линия | 1991 |
|
SU1787177A3 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| Автооператор для гальванохимических линий | 1985 |
|
SU1330057A1 |
| Автооператор линий гальванической и химической обработки | 1985 |
|
SU1306986A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ХИМИЧЕСКИХ И ГАЛЬВАНИЧЕСКИХ ПОКРЫТИЙ | 2008 |
|
RU2379382C2 |
| Автоматическая линия для гальванической и химической обработки деталей | 1985 |
|
SU1300042A1 |
| Автооператорная гальваническая линия | 1984 |
|
SU1219680A2 |
| Линия для химического фрезерования крупногабаритных изделий | 1987 |
|
SU1497278A1 |
| Устройство для загрузки станков | 1978 |
|
SU1040713A1 |
Фи&.1
