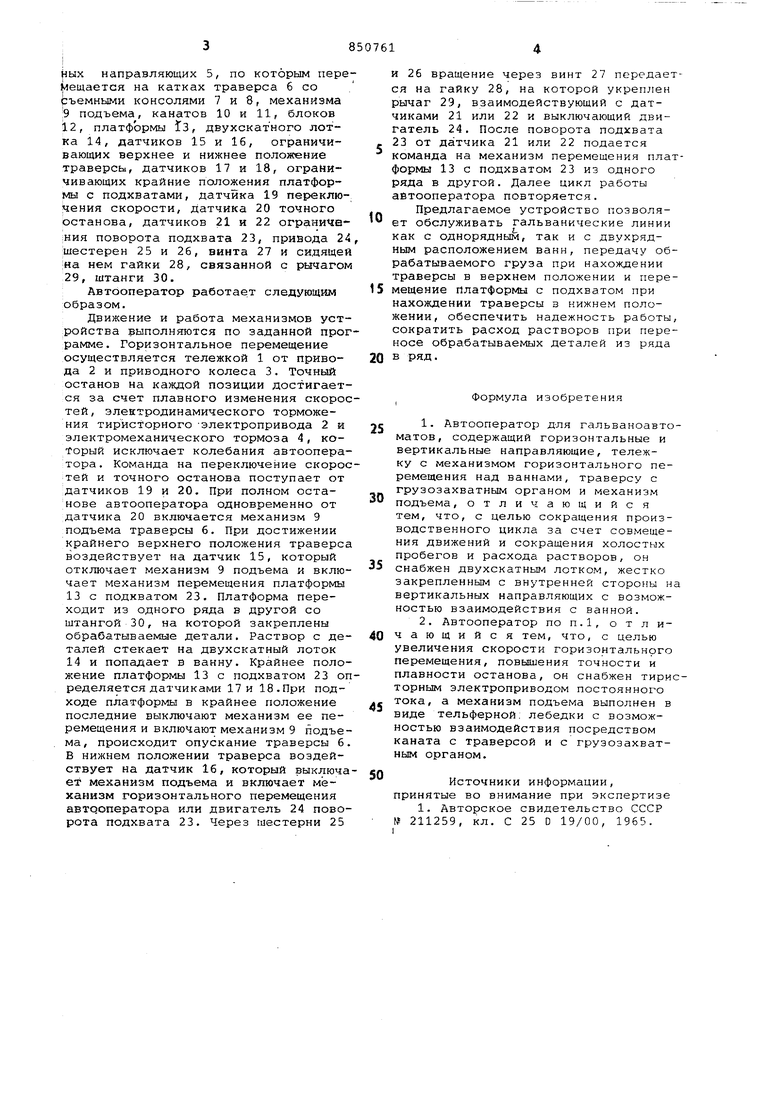
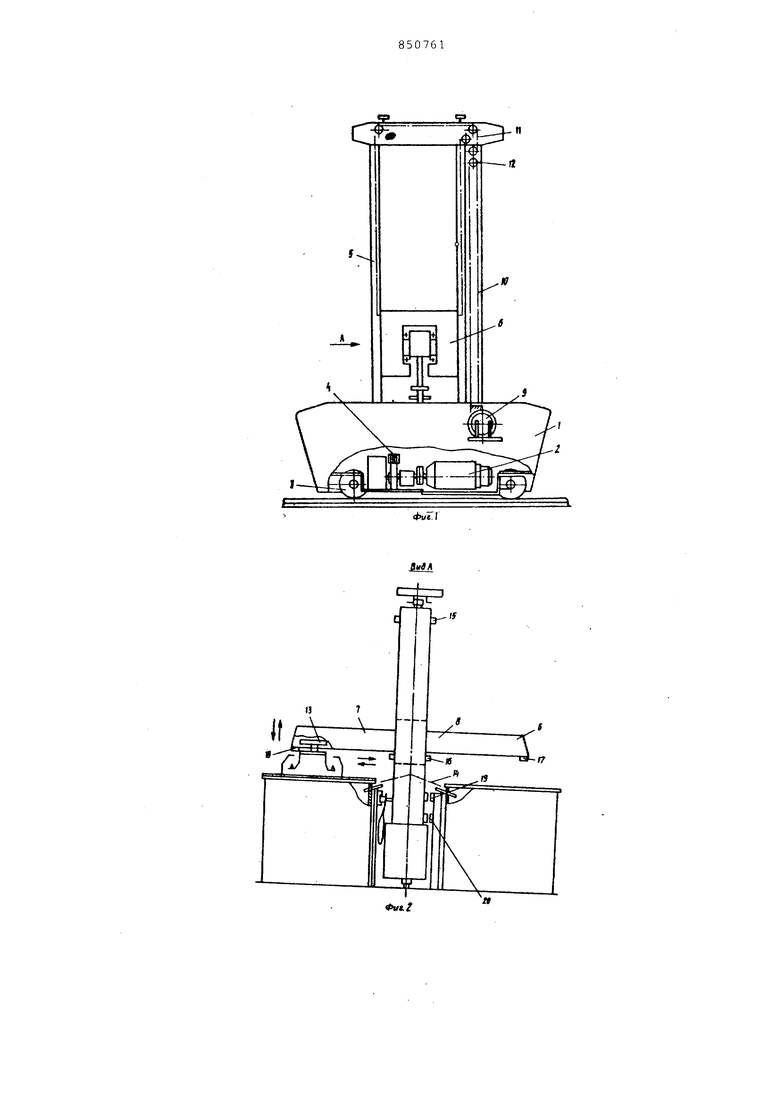
(54) АВТООПЕРАТОР ДЛЯ ГАЛЬВАНОЙВТОМАТОВ Изобретение относится к гальванотехнике, в частности к устройствам, применяемым для транспортировки дета лей при нанесении гальванических и химических покрытий. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является автооператор, применяемый для обслуживания многорядных гальванических линий, со тоящий из продольной тележки, травер сы, связанной с продольной тележкой посредством штанг-реек, тележки с подхватом, стационарного привода для горизонтального перемещения авто оператора 13Однако известный автооператор имеет сложную конструкцию механизма подъема, где траверса поднимается че тырьмя штанг-рейками, установленными жестко на продольной тележке, что вызывает трудности при изготовлении монтаже и эксплуатации. Кроме того, подхват штанги по четырем отверстиям ненадежен. Цель изобретения - сокращение пр изводственного цикла за счет совмещения движений и сокращения холосты пробегов и расхода растворов. Поставленная цель достигается автооператор, содержащий горизонтальные и вертикальные направляющие тележку с механизмом горизонтального перемещения над ваннами, траверсу с грузозахватным органом и механизм подъема, снабжен двухскатным лотком, жестко закрепленным с внутренней стороны на вертикальных направляющих с возможностью взаимодействия с ванной. С целью увеличения скорости горизонтального перемещения, повышения. точности и плавности останова автооператор снабжен тиристорным электроприводом постоянного тока, а механизм подъема выполнен в виде тельферной лебедки с возможностью взаимодействия посредством каната с траверсой и с грузозахватным органом. На фиг.1 изображено предлагаемое устройство, общий вид/ на фиг.2 вид А на фиг.1; на фиг.З - поворотный подхват. Автооператор состоит из тележки 1 с приводом 2, предназначенным для горизонтального перемещения автооператора, приводного колеса 3, электромеханического тормоза 4, вертикальНых направляющих 5, по которым перемещается на катках траверса 6 со :ъемными консолями 7 и 8, механизма :9 подъема, канатов 10 и 11, блоков 12, платформы 1з, двухскатного лотка 14, датчиков 15 и 16, ограничивающих верхнее и нижнее положение траверсы, датчиков 17 и 18, ограничивающих крайние положения платформы с подхватами, датчика 19 переклю-. чения скорости, датчика 20 точного останова, датчиков 21 и 22 ограничв:ния поворота подхвата 23, привода 24 шестерен 25 и 26, винта 27 и сидящей на нем гайки 28, связанной с рычагом 29, штанги 30.
Автооператор работает следующим образом.
Движение и работа механизмов устройства выполняются по заданной программе. Горизонтальное перемещение осуществляется тележкой 1 от привода 2 и приводного колеса 3. Точный останов на каждой позиции достигается за счет плавного изменения скоростей, электродинамического торможения тиристорного -электропривода 2 и электромеханического тормоза 4, который исключает колебания автооператора. Команда на переключение скоростей и точного останова поступает от датчиков 19 и 20. При полном останове автооператора одновременно от датчика 20 включается механизм 9 подъема траверсы 6. При достижении крайнего верхнего положения траверса воздействует на датчик 15, который отключает механизм 9 подъема и включает механизм перемещения платформы
13с подхватом 23. Платформа переходит из одного ряда в другой со штангой 30, на которой закреплены обрабатываемые детали. Раствор с деталей стекает на двухскатный лоток
14и попадает в ванну. Крайнее положение платформы 13 с подхватом 23 определяется датчиками 17 и 18 .При подходе платформы в крайнее положение последние выключают механизм ее перемещения и включают механизм 9 подъема, происходит опускание траверсы 6. В нижнем положении траверса воздействует на датчик 16, который выключает механизм подъема и включает механизм горизонтального перемещения автооператора или двигатель 24 поворота подхвата 23. Через шестерни 25
и 26 вращение через винт 27 передается на гайку 28, на которой укреплен рычаг 29, взаимодействующий с датчиками 21 или 22 и выключающий двигатель 24. После поворота подхвата 23 от датчика 21 или 22 подается команда на механизм перемещения платформы 13 с подхватом 23 из одного ряда в другой. Далее цикл работы aBToonepatopa повторяется.
Предлагаемое устройство позволяет обслуживать гальванические линии как с однорядным, так и с двухрядным расположением ванн, передачу обрабатываемого груза при нахождении траверсы в верхнем положении и перемещение Платфор1«йл с подхватом при нахождении траверсы з нижнем положении, обеспечить надежность работы, сократить расход растворов при переносе обрабатываемых деталей из ряда
0 в ряд.
Формула изобретения
1- Автооператор для гальваноавтоматов, содержащий горизонтальные и вертикальные направляющие, тележку с механизмом горизонтального перемещения над ваннами, траверсу с
грузозахватным органом и механизм
подъема, отличающийся
тем, что, с целью сокращения производственного цикла за счет совмещения движений и сокращения холостых пробегов и расхода растворов, он
снабжен двухскатным лотком, жестко закрепленным с внутренней стороны на вертикальных направляющих с возможностью взаимодействия с ванной.
2. Автооператор по п.1, о т л ичающийся тем, что, с целью увеличения скорости горизонтального перемещения, повышения точности и плавности останова, он снабжен тиристорным злектроприводом постоянного тока, а механизм подъема выполнен в виде тельферной: лебедки с возможностью взаимодействия посредством каната с траверсой и с грузозахватным органом.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 211259, кл. С 25 D 19/00, 1965.
СЖ: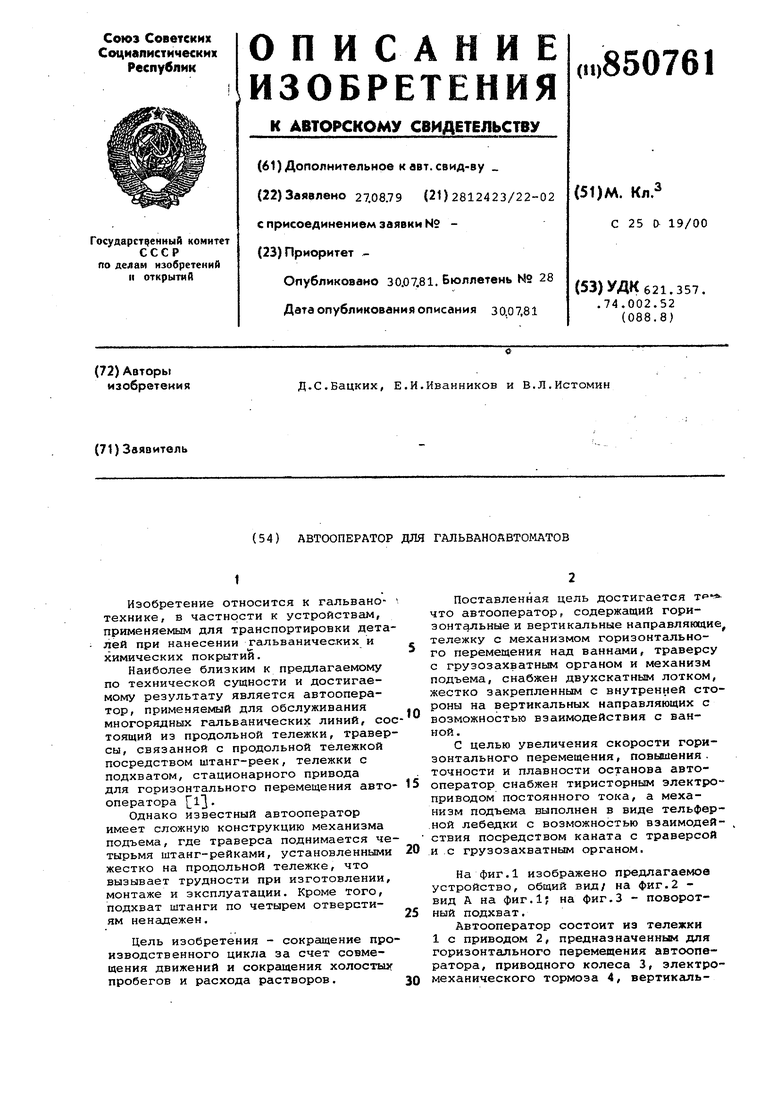
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для гальванических и химических линий | 1981 |
|
SU981463A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ХИМИЧЕСКИХ И ГАЛЬВАНИЧЕСКИХ ПОКРЫТИЙ | 2008 |
|
RU2379382C2 |
| Эстакадный гальванический автооператор | 1971 |
|
SU472890A1 |
| Автооператор для гальванохимических линий | 1985 |
|
SU1330057A1 |
| Линия для химического фрезерования крупногабаритных изделий | 1987 |
|
SU1497278A1 |
| Автооператор линий гальванической и химической обработки | 1985 |
|
SU1306986A1 |
| Автооператор | 1971 |
|
SU481524A1 |
| Автоматическая линия для гальванохимической обработки деталей | 1987 |
|
SU1497294A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНОАВТОМАТОВ | 1968 |
|
SU211259A1 |
If
.Z
