Изобретение относится к нанесению покрытий на изделия и может найти широкое применение в различных отраслях промышленности, например, в гальванических цехах на гальванохимических многопроцессных линиях с управлением от ЭВМ.
Цель изобретения - повышение надежности работы автооператора для гальванохимических линий.
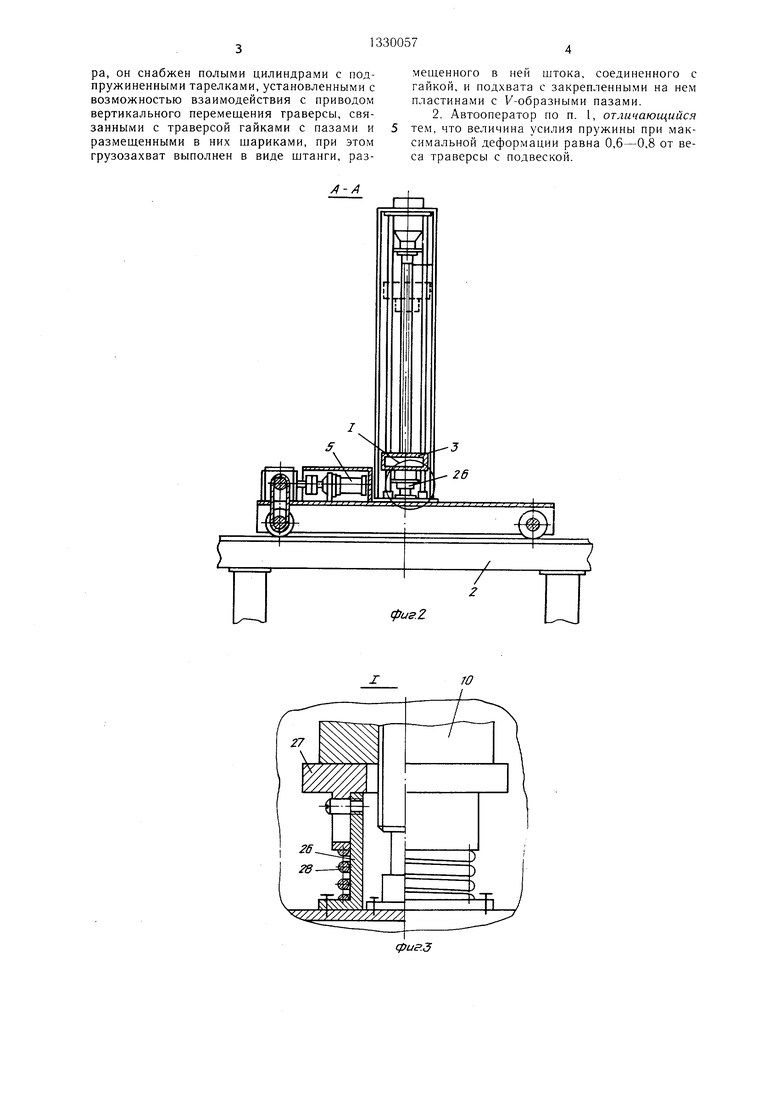
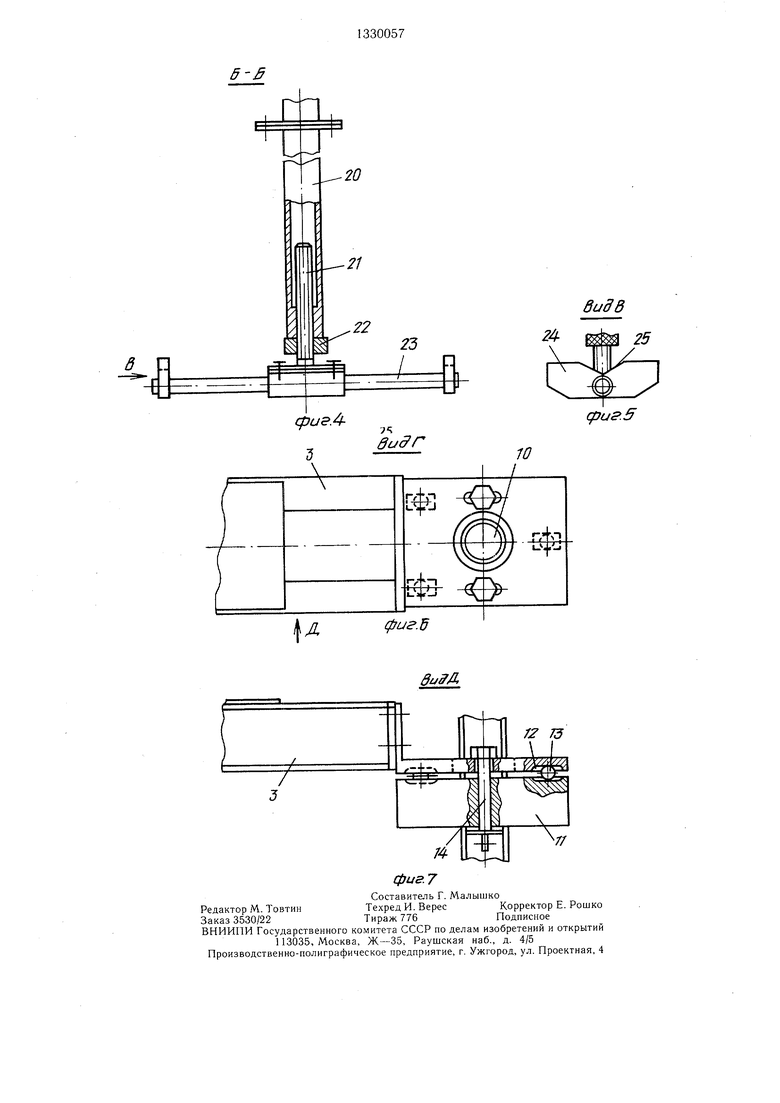
На фиг. 1 представлен автооператор, обший вид; на фиг. 2 - сечение А-А на фиг. 1, автооператор и привод продольного перемешения автооператора; на фиг. 3 - узел I на фиг. 2, корпус с подпружиненной тарелкой; на фиг. 4 - разрез Б-Б на фиг. 1, грузозахват; на фиг. 5 - вид В на фиг. 4, на пластину с 1/-образными пазами подхвата; на фиг. 6 - вид Г на фиг. 1; на фиг. 7 - вид Д на фиг. 6.
Автооператор состоит из несущей конструкции 1, выполненной в виде портала и установленной на рельсовом пути 2. Портал содержит траверсу 3 с кареткой 4, привод 5 продольного перемещения автооператора, привод 6 вертикального перемещения траверсы 3, выполненный из гидромотора 7, редукторов 8, соединенных с гидромотором 7 трансмиссией 9, ходовых винтов 10, связанных с гайками 11. Гайки 11 выполнены с пазами 12, в которых размещены шарики 13. При этом гайки 11 связаны с траверсой 3 посредством болтов 14. Привод 15 поперечного перемещения каретки 4 содержит гидромотор 16, соединенный с валом 17 и связанный с гайкой 18, расположенной на каретке 4. Грузозахват 19 также размещен на каретке 4 и выполнен в виде щтанги 20 с резьбовым отверстием, размещенного в ней штока 21, соединенного с гайкой 22 и подхвата 23 с закрепленными на нем пластинами 24 с V-образными пазами 25. К нижней части траверсы 3 под ходовыми винтами 10 закреплены полые цилиндры 26 и тарелки 27, которые подпружинены пружиной 28.
Величина усилия пружины 28 при максимальной деформации равна 0,6-0,8 от веса траверсы с грузом.
Подпружиненная тарелка 27 используется также в качестве нижнего упора для четкой фиксации положения подхвата 23, а также в качестве демпфера в аварийных ситуациях, при самопроизвольном падении траверсы. Г1одвеска с грузом обозначена позицией 29.
Автооператор работает следующим образом.
До начала работы траверса 3 с грузоза- хватом 19 без подвески 29 находится в нижнем положении. По команде с пульта управления включается привод 5 продольного перемещения автооператора. Автооператор подходит к позиции, откуда необходимо забрать подвеску 29. Привод 5 продольного перемещения автооператора выключается и останавливает автооператор. В зависимости от конструкции штанги 20, глубины ванны.
0
вертикального хода автооператора щток 21 грузозахвата 19 устанавливают таким образом, чтобы пластины 24 с К-образными пазами подхвата 23 свободно можно было подвести под подвеску 29. Включается привод 6 вертикального перемещения траверсы 3. Движение от гидромотора 7 передается через редукторы 8, связанные трансмиссией 9, ходовым винтом 10 на гайки 11, и траверса 3 поднимается. Длина болтов 14 выбрана таким образом, чтобы не было жесткой связи траверсы 3 с гайками 11 и она могла бы перемещаться относительно гаек 11 по шарикам 13, что исключает заклинивание в паре винт-гайка из-за неточностей сборки и изго5 товления винтов.
Упругая сила пружины 28 сообщает через гайку 11 траверсе 3 начальный импульс, помогающий траверсе 3 преодолеть трение покоя. При подъеме траверсы 3 подвеска 29 укладывается в V-образные пазы пластин 24
0 грузозахвата 19 и вместе с траверсой 3 перемещается в верхнее положение.
Для передачи штанги 20 с подвеской 29 из одного ряда ванн в другой включается привод 15 поперечного перемещения. От гидс ромотора 16 вращение через вал 17 передается на гайку 18 и каретка 4 со штангой 20 п подвеской 29 приходит в движение. Так как гайка 18 выполнена из капролона, то нет необходимости в смазке, что исключает попадание масла в ванны. После передачи подвески 29 в другой ряд ванн привод 15 поперечного перемещения каретки выключается и включается привод 6 вертикального перемещения траверсы 3, которая вместе с.подвеской 29 опускается в нижнее положение. При этом тра5 верса 3 опускается на подпружиненные тарелки 27, вес траверсы, преодолевая усилие пружины 28, сжимает ее, тарелки 27 опускаются и упираются в полый цилиндр 26. Привод 6 отключается и траверса 3 останавливается, при этом пластины 24 грузо захвата 19 выходят из зацепления со штангой 20 и автооператор готов к перемещению на другую позицию.
Автооператор для гальванохимических линий имеет высокую надежность работы,
г позволяет упростить наладочные операции, облегчить условия работы при подъеме и опускании траверсы и повысить качество покрытия.
0
50
Формула изобретения
1. Автооператор для гальванохимических линий, включающий несущую конструкцию, размещенные на ней траверсу с кареткой и грузозахватом, привод продольного перемещения автооператора, привод вертикаль- ного перемещения траверсы и привод поперечного перемещения каретки с грузозахватом, отличающийся тем, что, с целью повышения надежности работы автооператоpa, он снабжен полыми цилиндрами с подпружиненными тарелками, установленными с возможностью взаимодействия с приводом вертикального перемещения траверсы, связанными с траверсой гайками с пазами и размещенными в них щариками, при этом грузозахват выполнен в виде щтанги, размещенного в ней штока, соединенного с гайкой, и подхвата с закрепленными на нем пластинами с 1/-образными пазами.
2. Автооператор по п. 1, отличающийся тем, что величина усилия пружины при максимальной деформации равна 0,6-0,8 от веса траверсы с подвеской.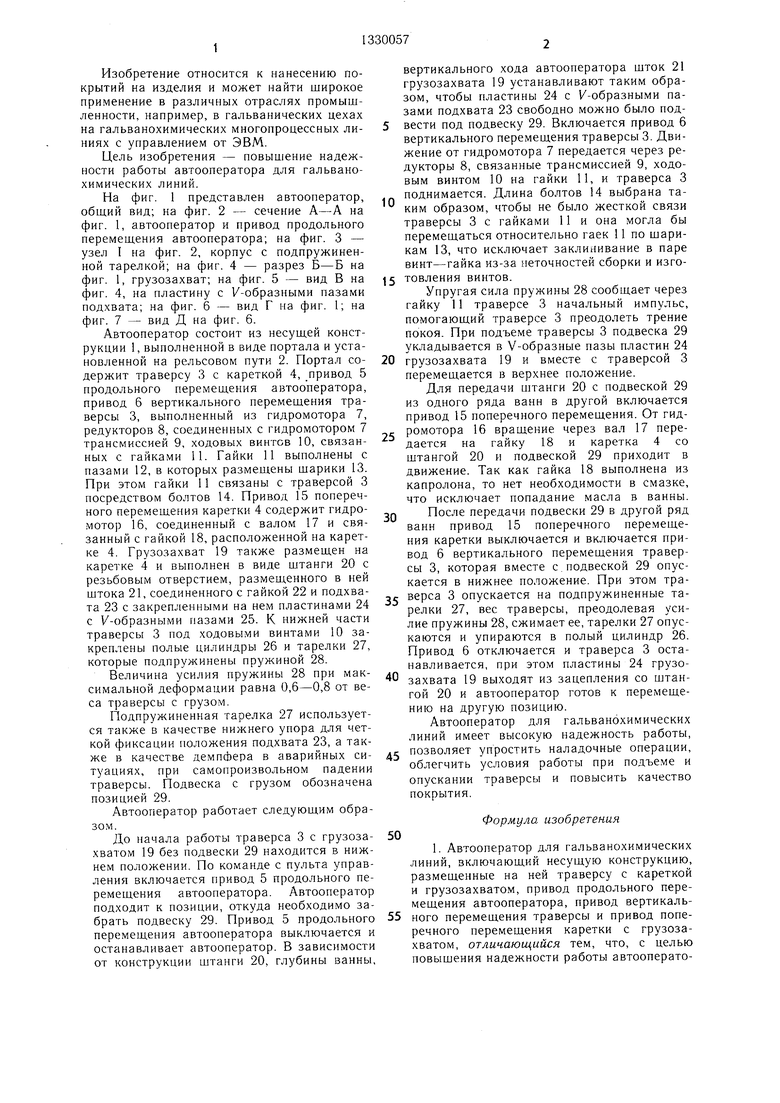
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для гальванических и химических линий | 1981 |
|
SU981463A1 |
| Автоматическая линия для гальванической и химической обработки деталей | 1985 |
|
SU1300042A1 |
| Установка для гальванической обработки деталей | 1981 |
|
SU996527A1 |
| Автоматическая линия для гальванохимической обработки крупногабаритных листовых изделий | 1983 |
|
SU1084342A1 |
| Подвесной конвейер | 1959 |
|
SU122067A1 |
| Гибкая автоматическая гальваническая линия | 1991 |
|
SU1787177A3 |
| Автооператор линий гальванической и химической обработки | 1985 |
|
SU1306986A1 |
| АВТООПЕРАТОРНАЯ ГАЛЬВАНИЧЕСКАЯ ЛИНИЯ | 1989 |
|
RU1816003C |
| Автооператор | 1979 |
|
SU837755A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНОАВТОМАТОВ | 1968 |
|
SU211259A1 |
Изобретение относится к области нанесения покрытий на изделия и позволяет повысить надежность автооператора. Он включает несущую конструкцию 1, размещенные на ней траверсу (Т) 3 с кареткой 4 и грузо- захватом (ГЗ) 19, привод продольного перемещения автооператора, привод 6 вертикального перемещения Т 3, привод 15 поперечного перемещения каретки 4 с ГЗ 19 и полые цилиндры с подпружиненными тарелками. Тарелки установлены с возможностью взаимодействия с приводом 6 и связаны с Т 3 гайками с пазами и размещенными в пазах щариками. Величина усилия пружины тарелки при макс, деформации равна 0,6-0,8 от массы Т 3 с подвеской (П) 29. Причем ГЗ 19 выполнен в виде щтанги, размещенного в ней штока, соединенного с гайкой, и подхвата с закрепленными на нем пластинами с К-образными пазами. Автооператор подходит к позициии, откуда необходимо забрать П 29. Шток ГЗ 19 устанавливают т. обр., чтобы пластины ГЗ 19 можно было подвести под П 29. Включается привод 6, Т 3 поднимается, а П 29 укладывается в V-образные пазы пластин ГЗ 19, и вместе с Т 3 перемещается в верхнее положение. После подачи П 29 в другой ряд ванн с помощью привода 15 включается привод 6 и Т 3 вместе с П 29 опускается на подпружиненные тарелки. Они опускаются на полый цилиндр и привод 6 отключается. 1 з.п.ф-лы, 7 ил. S (Л фивЛ
виде
25
фиг.д
Г2 73
74//
фие.Т
Составитель Г. Малышко
Редактор М. ТовтинТехред И. ВересКорректор Е. Рошко
Заказ 3530/22Тираж 776Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Автооператор для гальванических линий | 1980 |
|
SU901370A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНОАВТОМАТОВ | 0 |
|
SU211259A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
