(54) ЧЕТЫРЕХРОЛИКОВАЯ МАШИНА ДЛЯ ГИБКИ ПРОФИЛЕЙ


| название | год | авторы | номер документа |
|---|---|---|---|
| Съемник цилиндрических изделий | 1981 |
|
SU984560A1 |
| Четырехроликовая машина для гибки профилей | 1976 |
|
SU625807A1 |
| Четырехроликовая машина для гибки профилей | 1983 |
|
SU1109219A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Устройство для изготовления изделий из пруткового или полосового материала | 1978 |
|
SU718197A1 |
| Съемник цилиндрических изделий | 1978 |
|
SU766704A1 |
| АВТОМАТ ИЗГОТОВЛЕНИЯ ИЗ ПРУТКА, ПОСРЕДСТВОМ ДВУСТОРОННЕЙ ГИБКИ, ДЕТАЛЕЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ ТИПА КЛЕММ РЕЛЬСОВЫХ СКРЕПЛЕНИЙ | 2009 |
|
RU2412772C2 |
| Устройство для гибки обечаек из листовых заготовок | 1982 |
|
SU1061883A2 |
| СТАНОК ДЛЯ ГИБКИ ИЗДЕЛИЙПРОКАТА | 1971 |
|
SU320326A1 |
| Устройство для гибки обечаек из листовых заготовок | 1982 |
|
SU1074622A2 |


1
Изобретение относится к обработке металлов давлением, в частности к устройствам для гибки профилей в кольцо, например для получения ободьев колес.
Известно устройство для гибки, содержащее гибочные ролики, задающий и приемный рольганги, каждый из которых представляет собой раму с установленными на ней роликами, щарниряо связанную со станиной и снабженную приводом ее поворота Ц.
В таком устройстве задающий рольганг,
связанный со станиной, не может выполнять свои функции в гибочных мащинах с регулируемым нижним боковым роликом, так как мейяе ся уровень задачи.
Hai@CTRi тЕКже и четырёхроликошвя ы9шина Д(ЛЯ гибки лрофил@й, евд€ржащ1я емойтирвааййые йа етайий§ гибвчйы§ ролики, т которых йийсййй боковой ролик со стороны подачи заготовки смойтировая в корпусе регулируемой по веотикали, и задающие приводные ролики 2.
В такой мащине с подъемом нижнего бокового ролика, находящегося со стороны подачи заготовки, уменьшается радиус гиба, то так как при этом изменяется уроBeHjb задачи заготовки, то диапазон гиба малых радиусов ограничен, особенно при механизированной подаче, т. е. заготовка начинает упираться в верхний гибочный ролик, что приводит даже к изгибу заготовки в противоположную сторону.
Цель изобретения - расширение технологических возможностей за счет увеличения диапазона диаметров ободьев.
Поставленная цель достигается тем, что четырехроликовая машина для гибки про10филей, преимущественно ободьев колес, содержащая смонтированные на станине гибочные ролики, один из которых установлен в корпусе, регулируемом по вертикали, и задающие приводные ролики, снабжена 13 рамой, шарнирно установленной на корпуet е юшможйоетью поворота е.€ в плоское ти подачи, и В1аимод1йетвующим с йей ре гулируемым упором, а задающие приводкые ролики смонтированы йа этой раме.
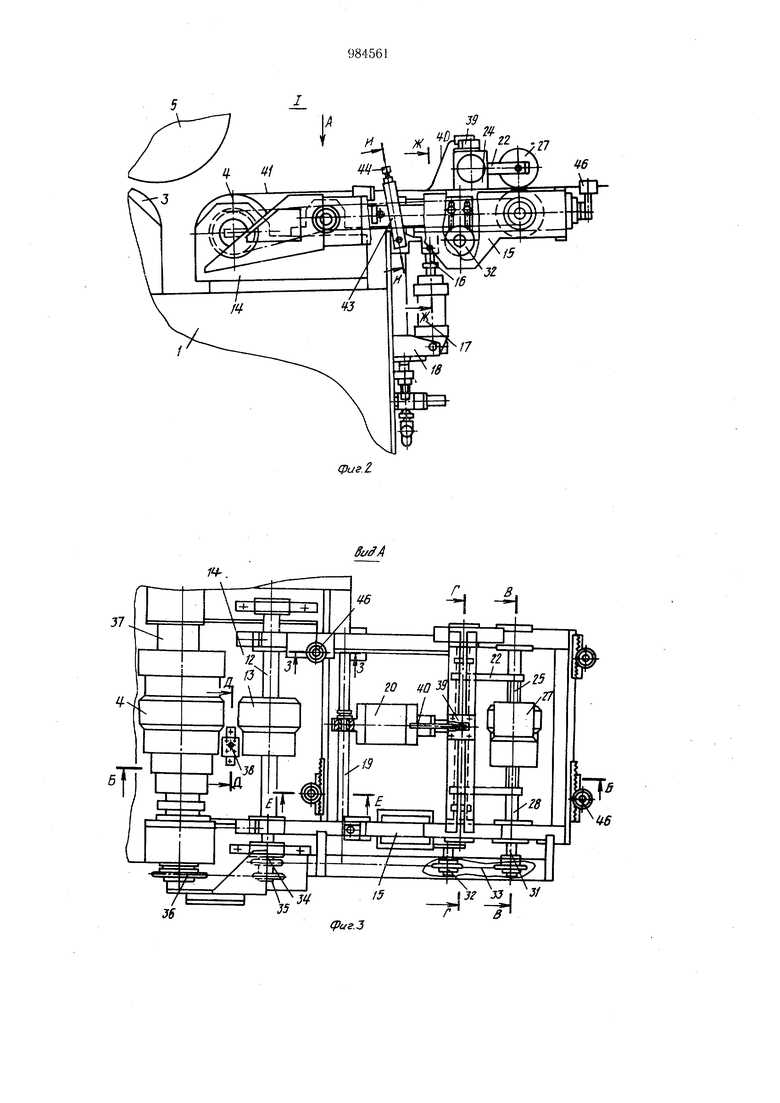
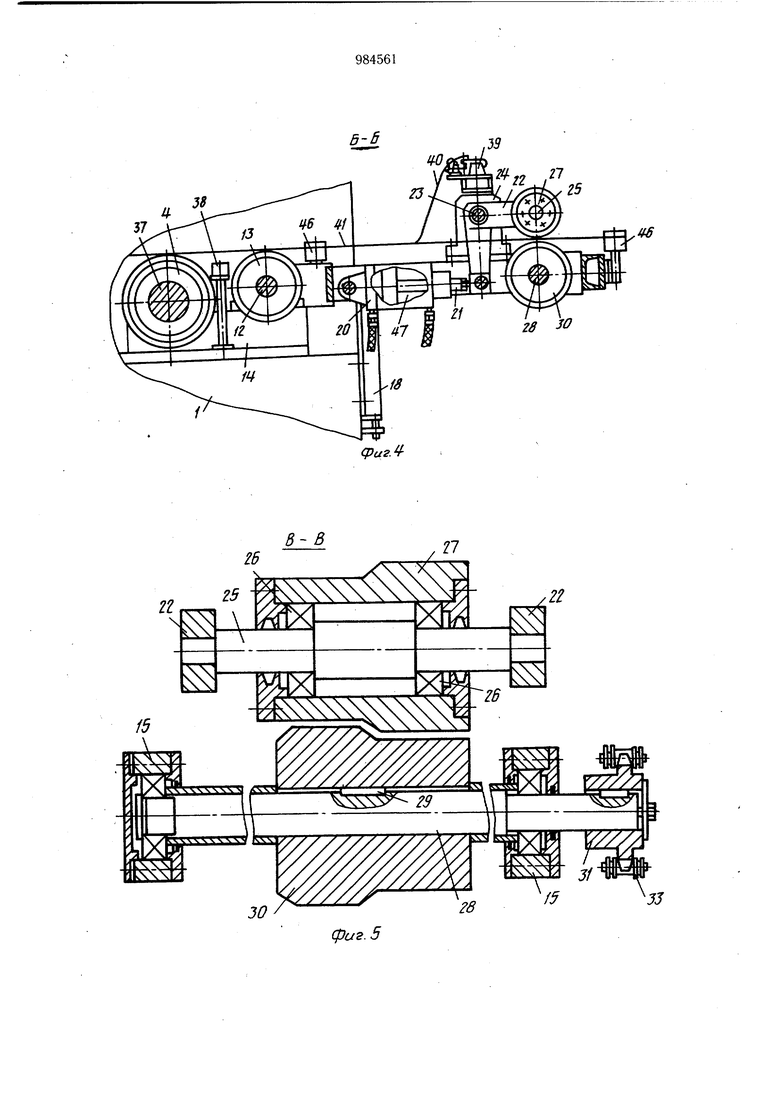
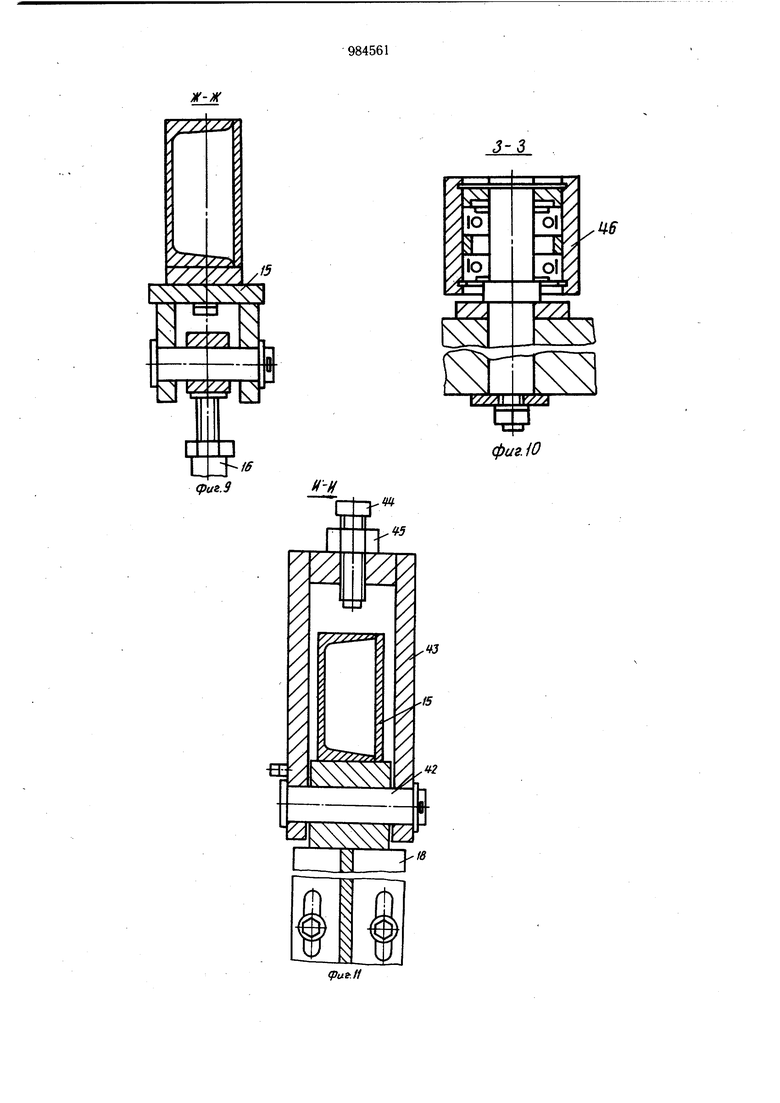
На фиг. I показана четырехроликовая
20 машина, общий вид с частичным разрезом; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 3; на фиг. 5 - сечение В-В на фиг. 3; на фиг. 6 - сечение Г-Г на фиг. 3; на фиг. 7 - сечеНие Д-Д на фиг. 3; на фиг. 8 - сечение Е-Е на фиг. 3; на фиг. 9 - сечение Ж-Ж на фиг. 2; на фиг. 10 - сечение 3-3 на фиг. 3; на фиг. 11 - сечение И-И на фиг. 2; на фиг. 12 показана схема нормальной гибки заготовки (когда задающие ролики направляют заготовку под углом), а на фиг. 13 - то же, (когда заготовка из задающих роликов направлена по прямой, т. е. без наклона к горизонтальной плоскости и в этом случае возможен обратный гиб). Четырехроликовая мащина для гибки профилей содержит станину 1, на которой смонтированы боковые 2 и 3 нижний 4 и верхний 5 гибочные ролики. Боковой 2 гибочный ролик не приводной, остальные приводные. Верхний 5 гибочный ролик смонтирован в корпусе 6, подвещенном к станине на оси 7. Корпус 6 через рычаги 8 н 9 связан с силовым цилиндром 10, установленным в станине 1, и взаимодействует с регулируемым упором, 11. На валу 12 поддерживающего ролика 13, установленного на регулируемом по вертикали корпусе 14 нижнего 4 гибочного ролика, щарнирно установлена одним концом рама 15, выполненная в форме рычага. Средняя часть рамы 15 шарнирно соединена со щтоком 16 силового цилиндра 17, установленного с возмо нностью горизонтального качания на кронштейне 18 станины 17. Внутри рамы 15 на оси 19 установлен дополнительный силовой цилиндр 20, соединенный штоком 21 с одним из плеч двуплечего рычага 22,. в свою очередь, установленного на оси 23 стойки 24 рамы 15. Двуплечий рычаг 22 вторым плечом соединен с осью 25, на подшипниках 26 которой установлен задающий йрижимной ролик 27. Ниже прижимного ролика на приводном валу 28, смонтированного в корпусах подшипников рамы 15, на шпонке 29 установлен задающий приводной ролик 30. На одном из концов приводного вала 28 установлена звездочка 31, соединенная через натяжную звездочку 32 цепью 33 со звездочкой 34 вала 12, поддерживаюш,его ролика 13. Рядом со звездочкой 34 на валу 12 установлена звездочка 35, соединенная со звездочкой 36, установленной на конце приводного вала 37 нижнего ГИ бочного ролика. Между поддерживающим роликом 13 и нижним 4 гибочным роликом на корпусе 14 последнего установлен индукционный датчик 38. В верхней части ст ойки 24 рамы 15 установлен индукционный датчик 39 с рычагом 40, имеющим возможность соприкосновения с заготовкой 41. Кронштейн 18 станины 1 щарнирно через ось 42 соединен с регулируемым упором, выполненным в виде скобы 43 с регулировочным винтом 44 и гайкой 45. Рама 15 снабжена четырьмя ограничительными роликами 46, три из которых регулируемые в горизонтальной плоскости. Позицией 47 обозначена штоковая полость дополнительного силового цилиндра 20. Работа четырехроликовой машины осуществляется следующим образом. В исходном положении приводные гибочные ролики 3-5 вращаются. Заготовка подается в задающие ролики 27 и 30 известными средствами, например рольгангом с прижимным роликом (не показан). При этом задающий прижимной ролик 27 находится в верхнем положении, т. е. не прижат к заготовке и через нее к задающему приводному ролику 30. При достижении заготовки 41 рычаг, последний отклоняется и своим флажком (не показан) глубже заходит в прорезь индукционного датчика 39. С дат импульс подается на электромагнит распределителя энергоносителя и с последнего энергоноситель подается в штоковую 47 полость дополнительного силового цилиндра 20. Под действием энергоносителя шток 21 через двуплечий рычаг 22, ось 25 прижимает задающий прижимной ролик 27 к заготовке и задающему приводному ролику 30. Заготовка будет с большим усилием продвигаться в гибочные ролики. При достижении заготовки индукционного датчика 36 -с него подается импульс на электромагнит распределителя энергоносителя (не показан). С распределителя энергоноситель поступает в поршневую полость (не показан) силового цилиндра 17. Под действием энергоносителя шток 16 воздействует на раму 15, т. е. приподнимает ее. Так как рама 15 смонтирована на валу 12 с возможностью поворота, то она при этом повернется вокруг вала 12 на какой-то заданный угол, Заданный угол поворота рамы 15 вокруг вала 12 осуществляется регулируемым упором, т. е. отвинчивается гайка 45 и регулировочным винтом 44, ввинчивая или вывинчивая его, устанавливается необходимая величина подъема рамы, а с этим и величина поворота ее на необходимый угол. После установки необходимой величины подъема рамы винт 44 контрится гайкой 45. Заготовка 4, получив необходимое направление, захватывается верхним 5 и средним 3 гибочным роликами. Происходит завивка заготовки в кольцо. Перед окончанием завивки кольца с датчика, установленного на съемнике (не показано), подается импульс на электромагнит распределителя энергоносителя (не показан). С распределителя энергоноситель подается в штоковую полость (не показана) силового цилиндра 10. Силовой цилиндр через рычаги 8 и 9 поворачивает корпус 6 верхнего 5 гибочного ролика относительно станины 1 вокруг оси 7 по дуге вверх на определенный угол съема изделия. В момент съема изделия с датчика на съемнике (не показан) подаётся импульс на электромагнит распределителя энергоносителя. С распределителя энергоноситель поступает в поршневую полость (не показана) силового цилиндра 10. Силовой цилиндр через рычаги 8 и 9 поворачивает корпус 6 верхнего 5 гибочного ролика в обрат-ном направлении, т. е. в исходное положение для следующего цикла завивки и съема изделия. С окончанием завивки индукционный датчик 38 подает импульс на электромагнит распределителя энергоносителя (не показан) и через последний с поршневой полости силового цилиндра 17 энергоноситель выбрасывается в атмосферу (на слив). Рама 15 опускается вниз. После пропуска заготбвки из-под рычага 40 последний опускается вниз и флажок его выходит из прорези индукционного датчика 39. С датчика импульс поступает на электромагнит распределителя энергоносителя и через последний энергоноситель выбрасывается из штоковой полости в атмосферу (на слив). Задающий прижимной ролик 27 при этом отжимается. Устройство готово для подачи и завивки следующих заготовок. .Ролики 30 служат для ограничения бокового отклонения заготовки 41 при подаче последней в гибочные ролики. Благодаря предлагаемому устройству появилась возможность путем изменения угла задачи заготовки в гибочные ролики расширить технологические возможности, т. е. расширить диапазон диаметров изготовляемых изделий.. Подача заготовки с регулируемым углом задачи в гибочные ролики позволяет значительно снизить усилие заталкивания и отказаться от громоздких и сложных дополнительных задающих устройств. Вследствие этого увеличилась производительность в 1,5-2 раза по сравнению с прототипом. По предварительным подсчетам экономический эффект от внедрения предлагаемого изобретения составит около 1200 2000 руб. в год от одной машины. Формула изобретения Четырехроликовая машина для гибки профилей, преимущественно ободьев колес, содержащая смонтированные на станине гибочные ролики, один из которых установлен в корпусе, регулируемом по вертикали, и задающие приводные ролики, отличающаяся тем, что, с целью расширения технологических возможностей за счет увеличения диапазона диаметров ободьев, она снабжена рамой, шарнирно установленной на корпусе с возможностью поворота ее в плоскости подачи, и взаимодействующим с ней регулируемым упором, а задающие приводные ролики смонтированы на этой раме. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 516451, кл. В 21 D 5/06, 1975. 2.Рабочие чертежи чётырехроликовой машины для гибки № К05-400-51-001C Б, ВЗК ПО им. Калинина, 1978 (прототип). фиг.З зг 331 -7 -r 3f
В- В
26
25
г
ш г Л. X X
фаг. 5
сриг.
11
/
22
S
,
X rфиг.6
Л38
V
фиг.7
W
01
ш
9uz.8 r
фиг.12
