Изобретение относится к машиностроению, а именно к манипуляторам для механизации и автоматизации процессов загрузки и выгрузки деталей при обслуживании технологического оборудЬя вания.
Известна рука манипулятора, содержащая основание, выдвижную штангу и установленную на ней захватную головку, имеющую, корпус, размещенные в нем перпендикулярно оси выдвижной штанги йаправляющие и по крайней мере два захвата 1.
Недостаток указанного устройства заключается в том, что оно не имеет возможности изменить взаимного-положения схватов относительно друг друга, что снижает его технологические возможности при механизёщии и автоматизации процессов загрузки и выгрузки деталей в технологическое оборудование с различным взаимным расположением посадочных мест.
Цель изобретения - расширение технологических возможностей за счет изменения взаимного положения захватов. .
Указанная цель .достигается.тем, что рука манипулятора снабжена подпружиненной вилкой и переключателем
имеющим и установленным на корпусе захватной головки с возможностью поворота вокруг оси, расположен ной перпендикулярно оси выдвижной штанги, при этом подпружиненная вилка шарнирно закреплена на основании руки и расположена с возможностью взаимодействия с упорами переключателя, причем захваты размещены на нап10равляющих и кинематически связаны с переключателем.
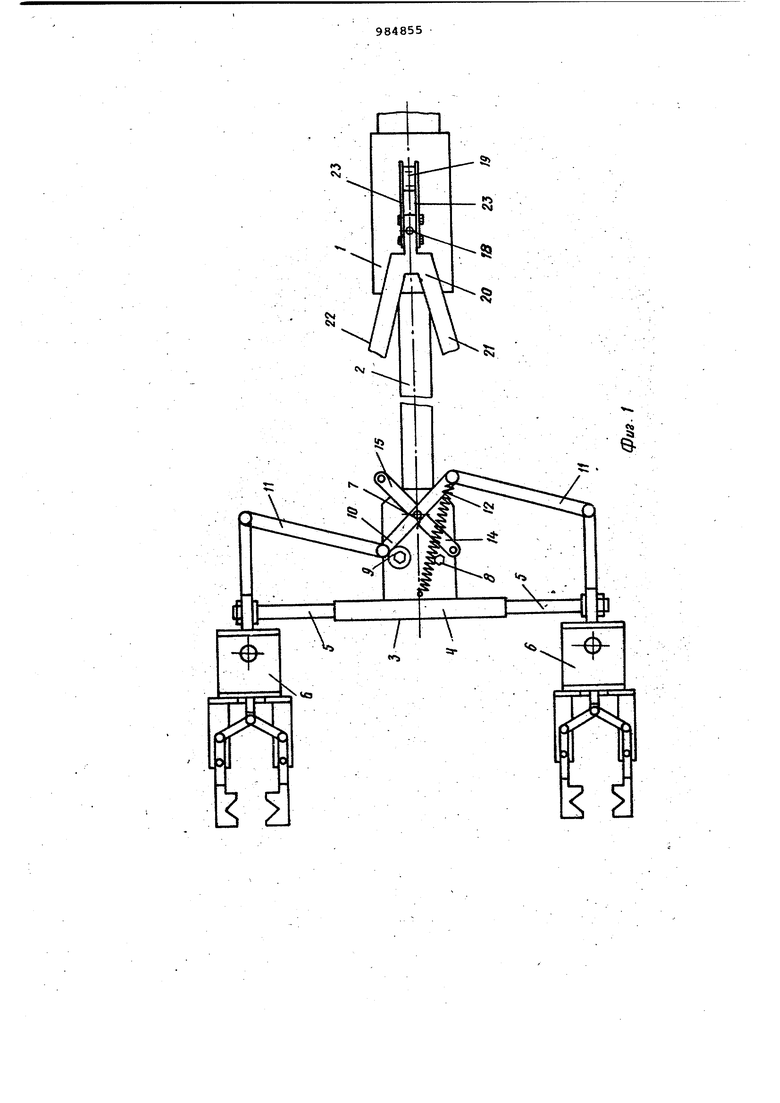
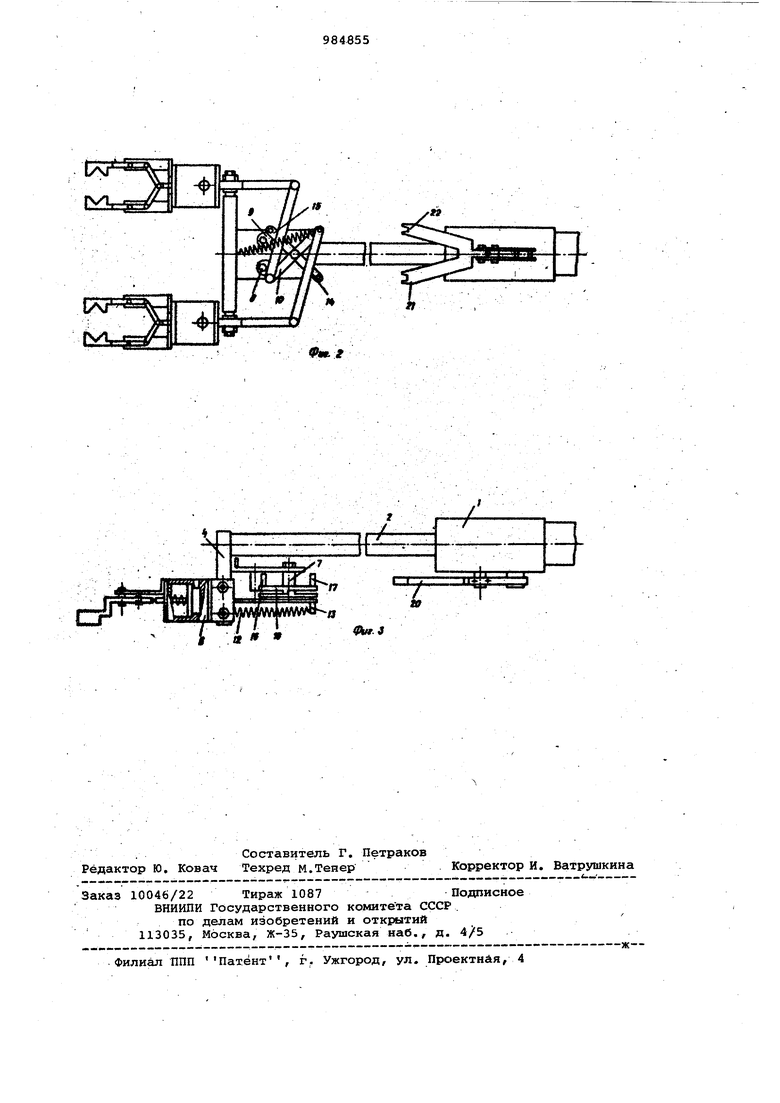
На фиг. 1 изображена рука манипулятора с раздвинутыми захватами; на фиг. 2 - то же, с вдвинутыми схвата15ми; на фиг. 3 - то же, вид сверху.
В основании 1 руки манипулятора расположена выдвижная штанга 2, на которой устаНовленна захватная головка 3, состоящая из корпуса 4, в кото20ром размещены перпендикулярно оси выдвижной штанги 2 направляющие 5, на которых закреплены захваты 6. На корпусе 4 установлена перпендикулярно направляющим 5 и выдвижной штан25ге 2 ось 7 и эксцентриковые упоры 8 и 9. На оси 7 установлен переключатель 10, который кинематически связан тягами 11 с захватами 6. Пружина 12 закреплена одним концом на кор
30 пусе 4, а другим - на оси 13, установленной на переключателе 10, и обеспечивает два фиксированных положения переключателя.10. В первом положении плечо 14 переключателя 10-i опирается -наэксцентриковый упор 8, во втором положении плечо 15 --переключателя 10 опирается на эксцентриковый упор 9, На плече 14 переключателя 10 закреплен упор 16, а на пле-че 15 - упор 17. На основании 1 руки манипулятора установлены ось 18 и фиксатор 19. На оси 18 установлена вилка 20 с пазами 21 и 22, удерживаемая от произвольного поворота вокруг оси 18 с помощью закрепленных на ней плоских пружин 23, взаимодействующих с фиксатором 19. .
Рука манипулятора работает следующим образом.
После схвата деталей захватами 6 дается команда на. вдвижение штанги 2, производится выгрузка деталей из технологического оборудования, в результате чего захватная головка 3 перемещается к основанию i руки манипулятора. Вилка 20 пйзом 22 начинает воздействовать на упор 17 плеча 15, переключатель 10 поворачивается против часовой стрелки вокруг оси 7, растягивая пружину 12. Вилка 20 при этом отклоняется от нейтрального положения в направлении по-часовой стрелке и упор 16 плеча 14 переключателя 10 огибает паз 21 вилки 20, не взаимодействуя с ней. После прохождения переключателем 10 нейтрального положения, при котором пружина 12 располагается параллельно оси выдвижной штанги 2 руки майипулятора, поворот переключателя 10 происходит за счет усилия пружин 12 и взаимодействия паза 22 вилки 20 с упором 17 плеча 15, причем контакт между ними сохраняется на протяжении .всего поворота переключа теля. Одновременно через тяги 11 движение от переключателя 10 передается захватами б, которые бла-; годаря вдвижению направляющих 5 в кррпус 4 будут сближаться до тех пор, пока плечо 15 переключателя 10 не достигнет эксцентрикового упора 9. В таком положении захватов 6 рука манипулятора, например, поворачивается к- технологическому оборудованию с другим расположением посадочных мест под детали. После чего штанга 2 выдвигается из основания 1 для выгрузки деталей, при этом вилка 20 под действием пружин 23 установится в нейтральное положение. После выгрузки деталей дается команда на втягивание штанги 2 Когда захватная головка 3 подойдет к основанию 1 руки манипулятора, вилка 20 пазом 21 воздействует на упор 1 плеча 14, Переключатель 10 при этом поворачивается -по часовой стрелке вокруг оси 7, пружина 12 растягивается и вилка 20 отклоняется от нейтрального положения в направлении против часовой стрелки. Одновременно через тяги 11 движение передается направляющим 5, которые выдвигаются из корпуса 4. При этом захваты 6 раздвигаются и занимают первоначальное раздвинутое положение. Регулирование расстояния между захватами б в сдви. нутом положении осуществляется вращением эксцентрикового упора 9, а в раздвинутом положении - вращ-ением упора 8.
Применение предлагаемой руки позволяет уменьшить габаритные размеры штампа.
Формула изобретения
Рука манипулятора, содержащая основание, выдвижную штангу и установленную на ней захватную головку,, имеющую корпус, размещенные в нем перпендикулярно оси выдвижной штанги направляющие и по крайней мере два захвата, отличающаяся тем что, с целью расширениятехнологических возможностей за счёт изменения взаимного положения захватов, она снабжена подпружиненной вилкой и переключателем, имеющим упоры и установленным на корпусе захватной головки с возможностью поворота вокруг оси, расположенной перпендикулярно оси выдвижной штанги, при этом подпружиненная вилка шарнирно закреплена на основании и расположена с возможностью взаимодействия с упорами переключателя, причем захваты размещены на направляющих и кинематически связаны с переключателем.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР .№ 623734, кл. в 25 J 15/00, 1977..
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЛАБОРАТИВНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ПЕРЕМЕЩЕНИЯ ПРОДУКЦИИ ПОДВЕСНОГО РАЗМЕЩЕНИЯ | 2024 |
|
RU2841086C1 |
| Устройство для подачи детали в зону контроля после шлифования | 1990 |
|
SU1763142A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| КАНТОВАТЕЛЬ-МАНИПУЛЯТОР | 1991 |
|
RU2063372C1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Манипулятор | 1986 |
|
SU1315228A1 |
| Захват-кантователь | 1984 |
|
SU1299939A1 |
| УСТРОЙСТВО ДЛЯ НИЖНЕГО СЛИВА ЖЕЛЕЗНОДОРОЖНЫХ ЦИСТЕРН "СЛИВ ВАГ" | 1993 |
|
RU2095306C1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |