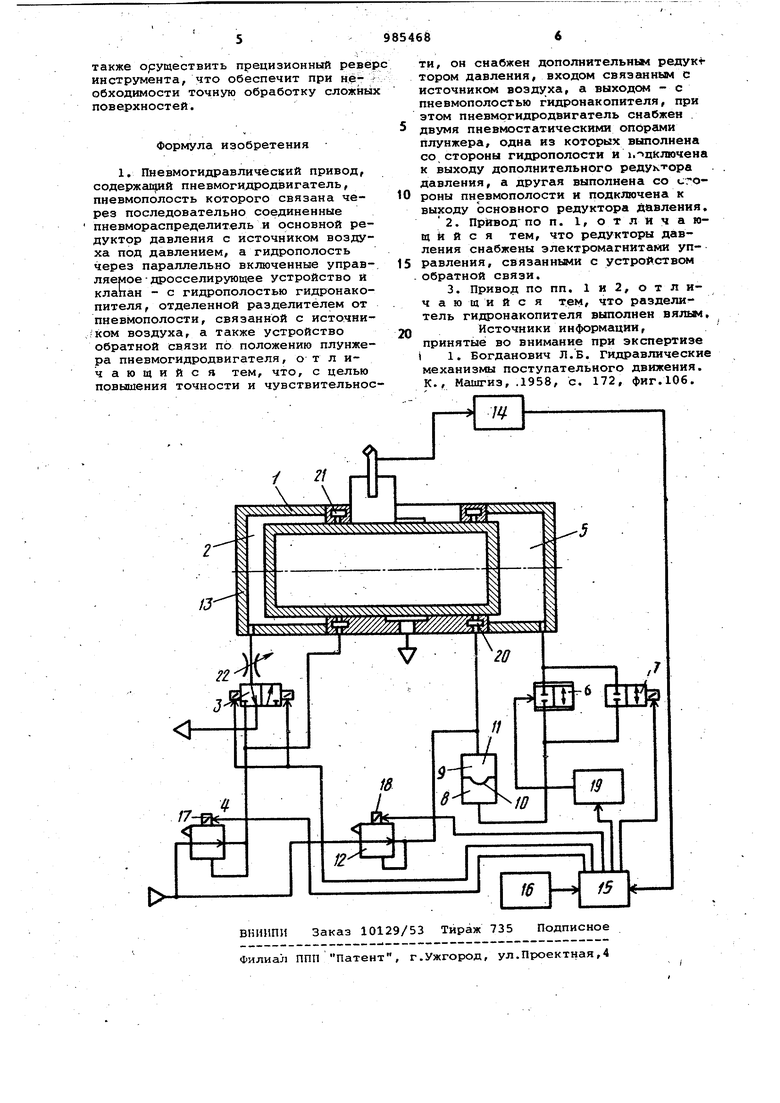
7 - с гидрополостьЮ 8 гидронакопите ля 9, отделенной вялым разделителем 10 от пневмополости 11 гидронакопителя, связанной через дополнительны редуктор 12 давления с источником воздуха, а т&кже устройство обратно связи по положению плУнжера 13 пневмогидродвигателя 1, вьтолненное в виде датчика 14, связанного с одним из входов блока 15 управления, другой вход которого соединен с программным блоком 16,. а выходы - с электромагнитами 17 и 18, редукторо 4 и 12 давления, соответственно, с пневмораспределителем 3, клапаном 7 и через электромеханический преобразоватвль 19 с дросселирующим устройством. 6. При этом пневмогидродвигатель 1 снабжен кольцевыми пнёвмостатическими опорами 20 и 21 плунжера 13, причем опора 20, выполненная со сто роны гидрополости 5, подключена к выходу редуктора 12, а опора 21, вы полненная со стороны пневмополости 2 - к выходу редуктора 4, связанного с пневмополостью 2 через дроссель 22. Пневмогидравлический, привод работает следующим образом. Сжатый воздух от источника возду ха под давлением через редуктор 4 давления поступает к пневмораспределителю 3 и пневмостатической опор 2i, а через редуктор 12 давления в пневмополость 11 гидронакопителя 9 и к пневмостатической опоре 20, По команде от блока 15 управления сжатый воздух поступает через дроссель 22 в пневмополость 2 пневмогидродвигателя 1 и создает движущее усилие, которое перемещает плунжер 13 (по черте ку вправо) , что соответ ствует прямому ходу. Если управляющим сигналом из блока 15 управления включен клапан 7, то жидкость, вытесняемая плунжером 13, поступает в гидронакопитель 9, а настройка дрос селя 22 определяет скорость быстрог перемещения плунжера 13. В случае, если клапан 7 перекрыт, жидкость пе ретекает через устройство б. Блок 1 управления в соответствии с результатами сравнения сигналов от программного блока 16 и датчика 14 обрат ной связи формирует закон, по которому электромеханический преобразователь 19 управляет устройством б, а следовательно, расходом жидкости и скоростью прецизионного перемещения- плунжера 13. Одновременно блок 15 управления воздействует на элект ромагниты 17 и 18 редукторов 4 и 12 изменяя по программе их выходные давления, разность которых определяет величину и знак перепада давле .на устройстве б и тем самым ско рость и направление движения плунжера 13, а также влияет на качественные характеристики привода, например его жесткость и быстродействие. Если давление воздуха на выходе редуктора 4 больше давления на выходе редуктора 12, то работа привода происходит как описано выше. При обратном соотношении жидкость перетекает из гидронакопителя 9 в гидрополость 5 пневмогидродвигателя 1 . через клапан 7 (быстрый обратный ход) или через устройство 6 (прецизионный обратный ход). При равенстве давлений на выходе редукторов 12 и 4 перепад давления на устройстве б равен нулю и движение отсутствует, так и в том случае, когда перекрыто устройство б и выключен клапан 7. Блок 15 управления осуществляет при необходимости прецизионное реверсирование плунжера 13 путем плавного изменения знака разности выходных давлений редукторов 4 и 12 на противоположный. После окончания рабочего цикла блок 15 управления переключает пневмораспределитель 3, который отделяет пневмополость 2 пневмогидродвигателя 1 от редуктора 4 давления и соединяет ее с атмосферой, в результате чего плунжер 13 выходит из рабочей зоны на повышенной скорости, определяемой настройкой дросселя 22. При этом давление в пнемостатических опорах 20 и 21 всегда меньше давления соответственнр воздуха и жидкости в полостях 2 и 5 пневмогидродвигателя 1. Это определяет однозначное направление утечек воздуха и жидкости, а именно из полостей 2 и 5 пневмогидродвигателя 1 в атмосферу, что, препятствует проникновению воздуха в жидкость из пневмостатической опоры 20 в гидрополость 5 пневмогидродвигателя 1. Кроме того, наличие давления в посадочных зазорах плунжера 13 уменьшает величину утечек сжатого воздуха и жидкости из полостей 2 и 5 пневмогидродвигателя 1, что совместно с эффектом разделения движущихся поверхностей пневмостатическим смазочным слоем повышает чувствительность и точность перемещения плунжера 13. Использование предлагаемого пневмогидравлического привода в гидросистемах станков с числовым программным управлением позволит получить чрезвычайно малые скорости перемещения (менее 0,5-1 мм/мин) благодаря отсутствию прерывистого трения в подвижных частях, демпфированию вибраций воздушной смазкой, пониженным утечкам жидкости и тонкой настройке перепада давления на дросселирующем устройстве б. Последнее no BOJmr

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический позицион-Ный пРиВОд | 1979 |
|
SU795870A1 |
| Система синхронизации скорости поршней силовых цилиндров | 1979 |
|
SU770741A1 |
| ПНЕВМОГИДРАВЛИЧЕСКИЙ ПОЗИЦИОННЫЙ ПОДАЧИ ИНЕРЦИОННЫХ ОБЪЕКТОВПРИВОД | 1973 |
|
SU418639A1 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| Установка для формования полых оболочек (ее варианты) | 1982 |
|
SU1101312A1 |
| Пневмогидравлический привод | 1981 |
|
SU950964A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906664A1 |
| Пневмогидравлический привод многоместных зажимных приспособлений технологического оборудования | 1977 |
|
SU1022801A2 |
| Пневмогидравлический цифровой позиционный привод | 1981 |
|
SU1021827A1 |
| Пневмогидравлический позиционныйпРиВОд | 1979 |
|
SU795869A1 |
