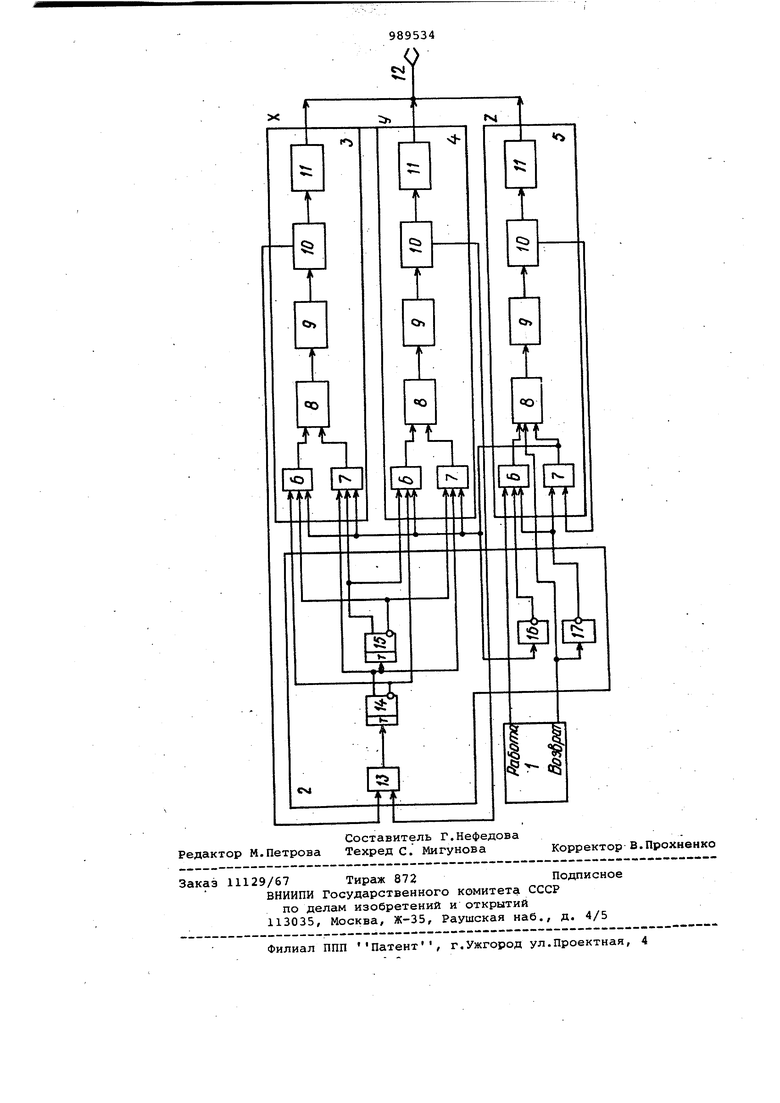
Изобретение относится к робототех нике и может быть использовано для создания роботов; осуществляющих сбо ку деталей типа вал-втулка. Известно устройство дпя управле ния сборочным роботом, содерж кее блок управления, ко11а утатор, блок за мен программы и по каждой регулируемой координате сумматор, управляемый ключ,регистр, цифро-аналоговый преобразователь, усилитель, двигатель, исполнительный механизм и датчик положения 1 . Однако данное устройство имеет ни кую надежность сборки детгшей типа вал-отверстие. Наиболее близким к изобретению яв ляется устройство, содержащее пульт управления и по каждой координате Х,Ч,Z первый элемент И и последоват;ельно соединенные вторе И, усилитель и двигатель, связантлЛ через датчик момента с исполиительиым механизмом, причем второй вход усилителя подключен к выходу первого элемента И 2. Недостатками этого устройства являются сложные алгоритм работы и тех ническая реализация. Цель изобретения - упрощение устройства. Поставленная цель Достигается теМг что устройство содержит первый и второй элементы НЕ и последовательно соединенные элемент ИЛИ, первый триггер и второй триггер, первый выход которого подключен к первому входу второго элемента И координаты X и первого элемента И координаты Y, а второй выход - к первому входу перЕюго элемента И координаты X и второго элемента И- координаты Y, первый выход первого триггера соединен с вторым входсм второго элемента И коорди ват Х и V, а второй выход - с вторым входом первого элемента И координат X и Y, первый и второй входы элемента ИЛИ подключены к выходу датчика момента координат }( и Y первый клход пульта управления соединен с первым входом первого элемента .И коорд:щиаты 2, а второй выход - с третьим входом усилителя координаты Z и с входом второго элемента НЕ, выходом подключенного к второму входу первого элемента И координаты гик первому входу второго элемента И координаты Z, второй вход которого соединен с выходом датчика момента координаты 2, а выход - с третьим входо первого и второго элемента И коорди нат X и Y и с входом первого элемен та НЕ, выходом подключенного к трет ему входу первого элемента И коорди наты 2 .На чертеже представлена функциональная схема .устройства, Устройство содержит пульт 1 упра ления, логический блок 2, координаты X , Уи23, 4и5 соответственно, первые элементы И 6, вторые элементы И 7, усилители 8, двигатели 9, датчики 10 момента, исполнительные механизмы 11, схват 12, элемент ИЛИ 1 первый и второй триггеры 14 и 15 со ответственно, первый и второй элеме ты НЕ 16И 17 соответственно. Устройство работает следующим образом, . При подаче сигнала с пульту упра ления -Работа через элемент И 6 начинает движение координата 2 5 в прямом направлении. При контакте детаЛей сигнал с датчика 1.0 момента через элемент И 7 обеспечивает обработку приводом координаты Z 5 заданного сборочного усилия через элемент И 7. Этот же сигнал включает в работу через элементы И 6 и 7 координаты X 3 и 4. Исходя из исходной схемы, начинает движение канал X 3 в прямом направлении. При фиксации останова координаты ХЗ сигнал с датчика 10 момента через элемент ИЛИ 13 перебросит триггеры 14 и 15 в другое состояние. Сигнал с их прямых выходов через элемент И 7 приводит в движение координату X 3 в обратном направлении. При следующем упоре любой из датчиков 10 момента координат X 3 и Y 4 перебросит через элемент ИЛИ 13 триггер 14 в нулевое состояние. Это обеспечивает движение координаты 4 в прямом направлении Следующий упор - движение в обратном направлении. Если совмещение образую 14их отверстия втулки и вала не произошло, поисковые шаги координат ХЗ и Y4 повторяются. Если совмещение произошло, сигнала с элемента И 7 не будет, Это иcJ лючaeт движение координат ХЗ и 4 и обеспечивает через элемент НЕ 16 и элемент И 6 движение координаты Z 5 до полного сопряжения деталей, которое обеспечит выключение сигнала Работа (например, контактный датчик). Сигнал Возврат возвращает схват 12 по координате Z 5 в.исходную для сбо ки позицию, В это время элемент НЕ 1 исключает движение координаты Z 5 в прямом направлении и обработку усиПредлагаемая схема не требует пи. стройки после каждой сборочной опер.ации, она работоспособна с любого момента времени, причем, даже если произошло заклинивание деталей в зоне сопряжения, устройство позволяет путем последовательных движений каналов продолжить сопряжение деталей или возвратить в исходное состояние. Применение изобретения позволяет (Значительно упростить устройство и за счет этого повысить его производительность. Формула изобретения Устройство для управления сборочным роботом, содержащее пульт управления и по каждой координате X , Y , Н первый элемент И и последовательно соединенные второй элемент И, усилитель и двигатель, связанный через датчик момента с исполнительным механизмом, причем второй вход усилителя подключен к выходу первого элемента И, отличающееся тем, что, с целью упрощения устройства, оно содер жит первый и второй элементы НЕ и последовательно соединенные элемент ИЛИ, первыйтриггер и второй триггер, первый выход которого подключен к первому входу второго элемента И координаты X и первого элемента И координаты Y,а второй выходк первому входу первого элемента И координаты X и второго элемента И координаты Y,первый выход первого триггера соединен с вторым входом второго элемента И координат X и Y,a второй выход - с вторым входом первого элемента И координат X и Y,первый и второй входы элемента ИЛИ подключены к выходу датчика момента координат Х и Y, первый выход пульта управления соединен с первым . первого элемента И координаты Z,a второй выход - с третьим входом усилителя координаты Z и с входом второго элемента НЕ,выходом подключенного к второму входу первого элемента И координаты Z и к первому входу второго элемента И координаты Z, второй вход которого соединен с выходом датчика момента координаты 7, а выход - с третьим входом. первого и второго элемента И координат X и Y и с входом первого элемента НЕ, выходом подключенного к третьему входу первого элемента И координаты Z, Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР 620368, кл, В 25 J 9/00, 1978. 2,Авторское свидетельство СССР по заявке 2884957,кл. G 05 В 11/00, 19.80 (прототип) . .

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сборочным роботом | 1980 |
|
SU875331A1 |
| Устройство для управления сборочным роботом | 1980 |
|
SU1075233A1 |
| Устройство для управления сборочным роботом | 1985 |
|
SU1247839A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления сборочным роботом | 1988 |
|
SU1650429A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1414624A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1315297A1 |
| Устройство управления самоходным средством | 1988 |
|
SU1689921A1 |
| Функциональный интерполятор | 1985 |
|
SU1272311A1 |
| Устройство для управления сборочным роботом | 1983 |
|
SU1091115A1 |