(54) УСТРОЙСТВО ДЛЯ ПОДКЛЮЧЕНИЯ ВЫВОДОВ ДАТЧИКОВ
К ИЗМЕРРГГЕЛЬНОМУ БЛОКУ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для сварки кольцевых швов | 1990 |
|
SU1766638A1 |
| Шаговый конвейер | 1982 |
|
SU1051002A1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ КОНФЕТ «ВПЕРЕКРУТКУ» | 1973 |
|
SU379462A1 |
| Полуавтомат герметизации полупроводниковых приборов контактной сваркой | 1986 |
|
SU1362597A1 |
| Устройство для навивки пружин | 1982 |
|
SU1087237A1 |
| Машина для разделки рыбы | 1984 |
|
SU1210766A1 |
| Устройство для кантования обрабатываемых деталей на конвейере | 1987 |
|
SU1537623A1 |
| Устройство для подачи заготовок в рабочую зону пресса | 1975 |
|
SU557929A1 |
| Устройство для дозированной подачи заготовок | 1985 |
|
SU1284909A1 |
| Кантователь | 1976 |
|
SU599873A2 |
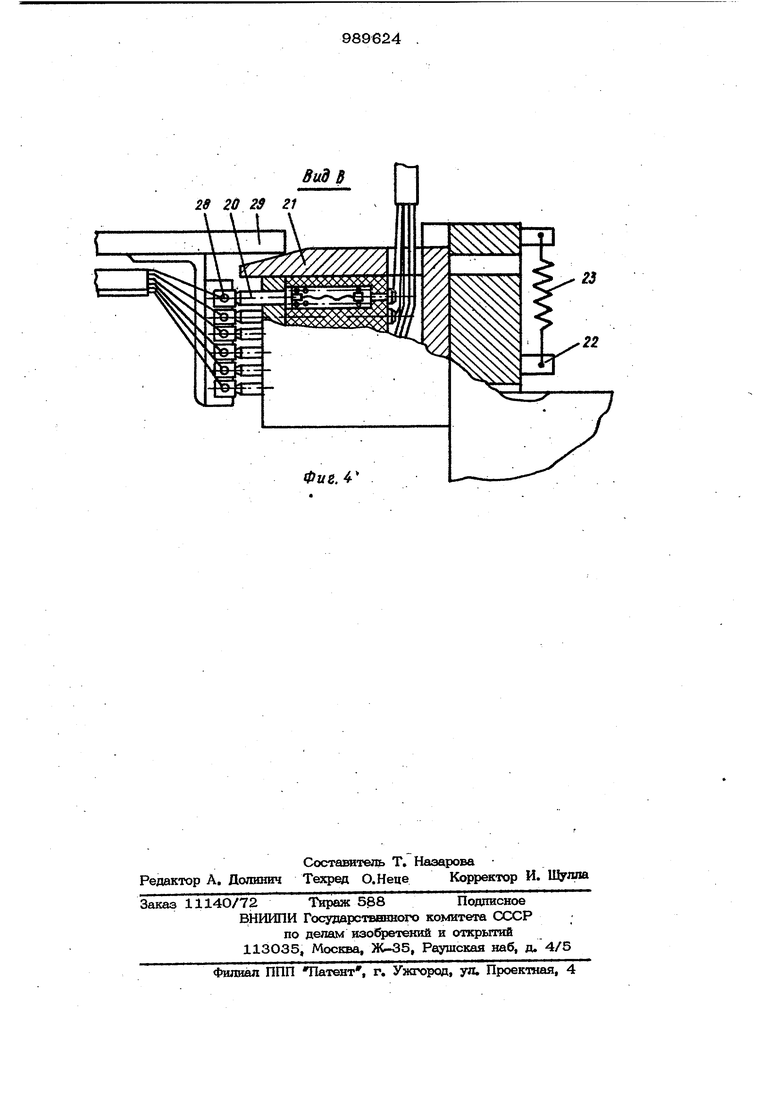
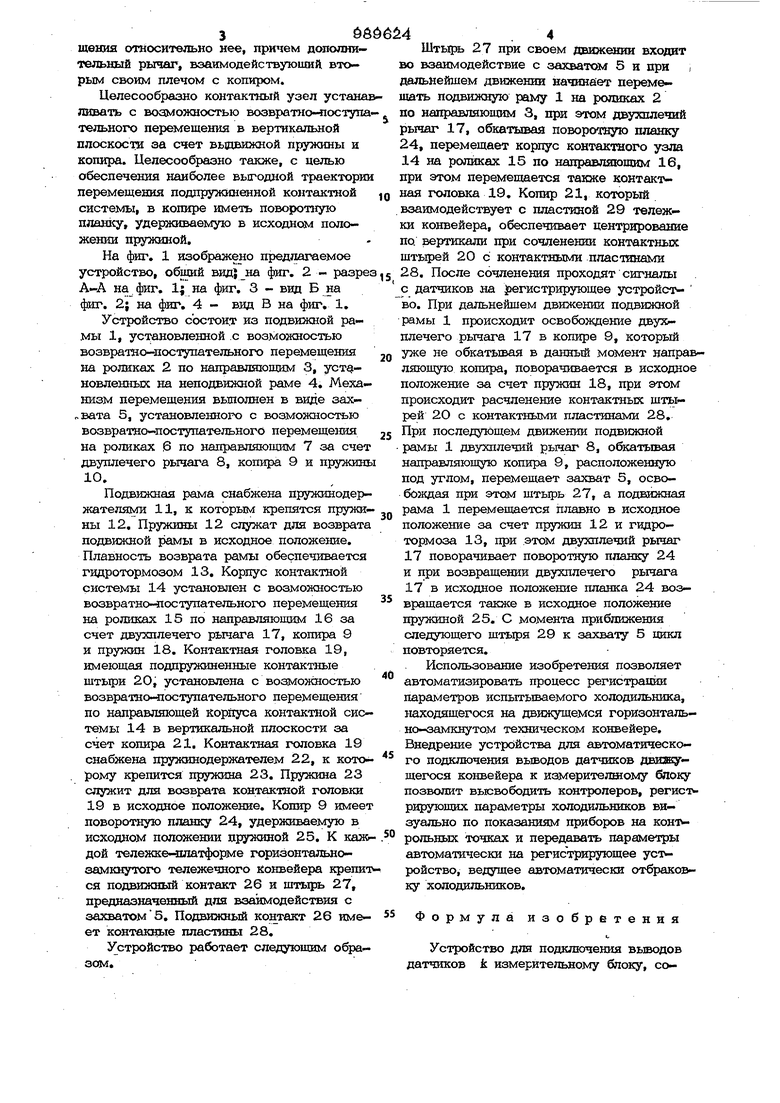
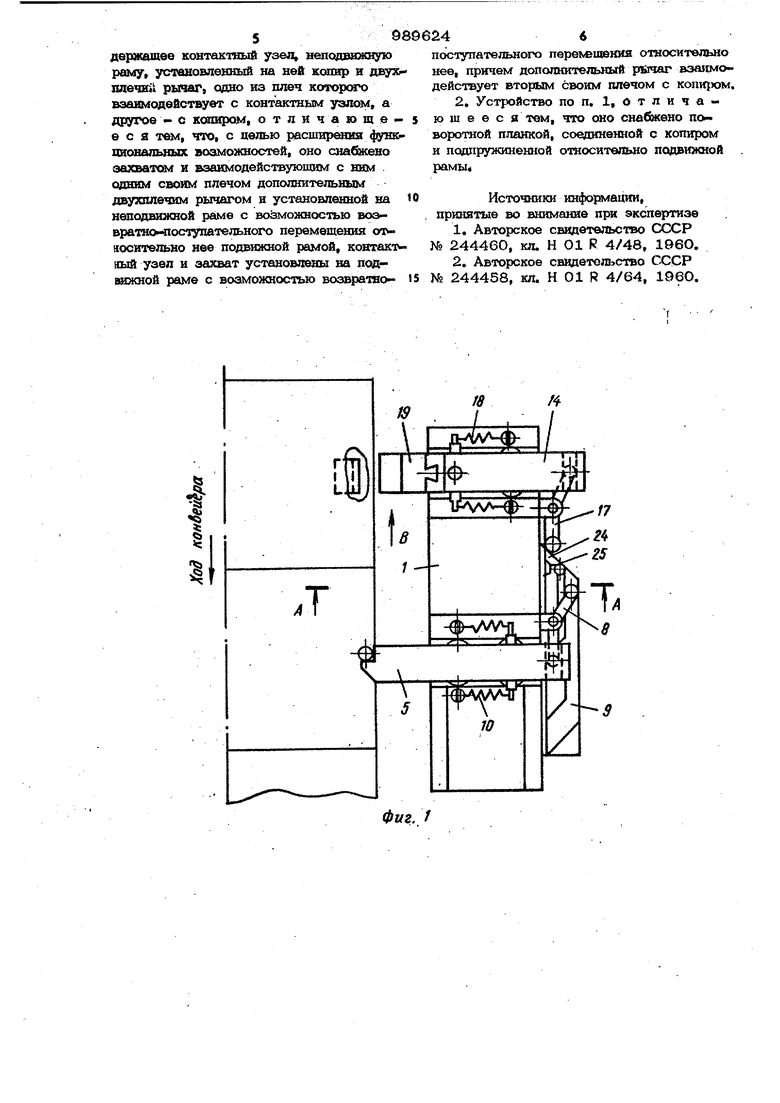
. .1 Изобретение относится к контактным устройствам для подключения вьюодов датчиков, установленных на движущемся испытательном конвейере к измерительному блоку для отбраковки изделий. Известно контактное устройство для подключения плоских керамических конденсаторов к блоку разбраковки, содержащее укрепленные на подпружиненных рычагах регулируемые контактные элементы и управляющий рычагами электромагнит til. Конструктивная особенность контактно ус ройства не позволяет производить УР браковку конденсаторов, находящихся на движущемся конвейере. Наиболее близким по технической суш ностга и достигаемому результату к предлагаемому устройству является устройство для подключения вьшодов к измерительному блоку и их отбраковки, содержащее контактный узел, неподвижную раму и установленный на ней копир и двуплечий рычаг, одно из плеч которого взаимодействует с контактным узлом, а другое - с копиром L 2 . Недостатком данного устройс-геа является невозможность производить отбраковку деталей, находящихся на движущемся конвейере. Цель устройства - расщирение функциональных возможностей, что выражает ся в обеспечении возможности передачи выходного сигнала с датчика контролируемого изделия, находящегося на движущег ся конвейере, на регистрирующее устроит, ство, находящееся вне зоны конвейера и повышение надежности ксжтактирования. Поставленная цель достигается тем, что устройство снабжено захватом и взаимодействующим с ним одним своим плечом допошштельным двухплечим рычагом и установленной на неподвижной раме с возможностью возвратно- юсоупательно- го перемещения отаюситель;яо нее подвю1{ ной рамой, контактный узел и захват установлены на неподвижной раме с возмож ностъю возвратно-лоступательного переме- шения отмоситвльно нее, причем дополнительный рычаг, вэаимодействуюишй вторым своим плечом с копиром. Целесообразно контактный узел устанав ливать с возможностью возвратио-лоступа тельного перемещения в вертикальной плоскости за счет выдвижной пружины и копира. Целесообразно также, с целью обеспечения наиболее выгодной траектории перемещения подпружиненной контактной системы, в копире иметь поворотную планку, удерживаемую в исходном положении пружиной. На фиг. 1 изображено предлагаемое устройство, общий фиг. 2 - разре А-А на фиг. 1{ на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - ввд В на фиг. 1. Устройство состоит из подвижной рамы 1, установленной .с возможностью возвратно-поступательного перемещения на роликах 2 по направлшощюут 3, установленных на неподвижной раме 4. Механизм перемещения вьшоянен в виде зах„вата 5, установленного с возможностью возвратно-поступательного перемещения на роликах ,6 по направляющим 7 за счет двушгечего рычага 8, копира 9 и пружины 10. Подвижная рама снабжена пружшюдержателями 11, к которым крепятся пружи- ны 12. Пружины 12 служат для возврата подвижной рамы в исходное положение. Плавность возврата рамы обеспечивается гидротормозом 13. Корпус контактной системы 14 установлен с возможностью возвратно-поступательного перемещения на роликах 15 по направляющим 16 за счет двухплечехч) рычага 17, копира 9 и пружин 18. Контактная головка 19, имеющая подпружиненные контактные щтыри 20, установлена с возможностью возвратно-поступательного перемещения по направляющей корпуса контактной системы 14 в вертикальной плоскости за счет копира 21. Контактная головка 19 снабжена пружинодержателем 22, к котк рому крепится пружина 23. Пружина 23 служит для возврата контактной головки 19 в исходное положение. Копир 9 имеет поворотную планку 24, удерживаемую в исходном положении пружиной 25. К кажг дои тележке- шатформе горизонтальнозамкнутого тележечного Конвейера крепит ся подвижный контакт 26 и штырь 27, предназначенный для взаимодействия с захватом 5. Подвижный контакт 26 имеет контакные пластины 28. Устройство работает следующим обра- зом. 66 4 Штырь 27 при своем движении входит во взаимодействие с захватом 5 и при , дальнейшем движении начинйет перемещать подвижную раму 1 на роликах 2 по направляющим 3, при этом двузсЕлечий рычаг 17, обкатывая поворотную планку 24, перемещает корпус контактаюго узла 14 на роликах 15 по натфавляющим 16, при этом перемещается также контак-рная головка 19. Копир 21, который взаимодействует с пластиной 29 тележки конвейера, обеспечивает центрирование по вертикали при сочленении контактных щтырей 20 с контактными пластанами 28. После сочленения проходят сигналы С датчиков на югистрирующее устройство. При дальнейшем движении подвижной рамы 1 происходит освобождение двухплечего рычага 17 в копире 9, который уже не обкатывая в данный момент направляющую копира, поворачивается в исходное положение за счет пружин 18, при этом происходит расчленение контактных щть1рей 2О с контактными пластинами 28. При последующем движении подвижной рамы 1 двухплечий рьяаг 8, обкатывая направляющую копира 9, расположенную под углом, перемещает захват 5, освобозкдая при этом щтырь 27, а подвижная рама 1 перемещается плавно в исходное положение за счет пружин 12 и гидротормоза 13, при этом двухплечий рычаг 17 поворачивает поворотную планку 24 и при возвращении двухплечего рычага 17 в исходное положение планка 24 возвращается также в исходное положение пружиной 25. С момента приближения следующего штыря 29 к захвату 5 цикл повторяется. Использование изобретения позволяет автоматизировать процесс регистрации параметров испытываемого холодильника, находящегося на движущемся горизонтально-замкнутом техническом конвейере. Внедрение устройства для автоматического подключения выводов датчиков движущегося конвейера к иэмерителшому блоку позволит вьювободить контролеров, perncTv рирующих параметры холодильников визуально по показаниям приборов на конт рольных точках и передавать параметры автоматически на регистрирующее уст ройство, ведущее автоматически отбраковку холодильников. Формула изобретения Устройство для подключения вьтодов датчиков k измерительному блоку, содержащее контактный узел, неподшокную рему, установленный на ней копир и двухр плечим рьпаг, одно из плеч которсячэ взаимодействует с контактны) узлом, а дргугое - с хошфоМ| отличающее с а тем, что, с целью расшнршош функциональных возможностей, оно снабжено эахвакял и взаимодействующим с нкм сщним своим плечом дополнительным двуяшечим рычагом и установленной на неподвижной раме с возможносшю воэвратнонпоступательного перемещения ат иосительно нее подвижной рамой, KOHraKtv. иый узел и захват установлены на ПОАшокной раме с возможноспаю возвра-гаопоступательного перемещения относитвлыю нее, причем дополюггелышй psraar взаимодействует вторым своим плечом с KOIIHJXJM
2, Устройство по п. 1, о т л и ч а ю ш е е с а тем, что оно снабжено по воротной планкой, соединенной с копиром и подпружиненной относительно подвижной рамы
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СХЮР № 244460, кл. Н 01 R 4/48, I960.
