(5t) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ОТНОСИТЕЛЬНОГО ОБЖАТИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования относительного обжатия | 1983 |
|
SU1119749A2 |
| Способ регулирования относительного обжатия полосы | 1984 |
|
SU1194524A1 |
| Система автоматического управления относительным обжатием прокатываемой полосы | 1987 |
|
SU1502147A1 |
| Способ дрессировки холоднокатаной металлической полосы | 1987 |
|
SU1560337A1 |
| Устройство для регулирования скорости движения стальной полосы | 1982 |
|
SU1053071A1 |
| Устройство для стабилизации положения передних концов полос при прокатке | 1980 |
|
SU944695A1 |
| Способ регулирования скоростей главных электроприводов реверсивной универсальной клети и устройство для его осуществления | 1985 |
|
SU1310053A1 |
| Регулятор относительного обжатия прокатываемой полосы | 1981 |
|
SU944696A1 |
| Устройство для подъема съемной тележки моталки | 1981 |
|
SU988403A1 |
| Устройство для управления агрегатом перемотки рулонов | 1989 |
|
SU1622049A2 |
1
Изобретение относится к средствам технологической автоматики прокатных станов и предназначено для использования в системах автоматического регулирования величин относительного обжатия на дрессировочных станах.
Дрессировочные станы предназначены для холодной или теплой прокатки листов и полос малыми обжатиями, не превышающими 5% обычно менее 1.
Известна система регулирования величины относительного обжатия, которая предназначена для стабилизации величины обжатия на заданном уровне, постоянном по всей длине полосы l .
При этом не учитывается неодноро ;нос1ь структурыи механических свойств по длине полосы в рулоне и, вследствие этого , не используются возмож ности процесса дрессировки для улучшения качества металла.
Наиболее близким к предлагаемому по технической сущности и достига емомр результату является регуля тор относительного обжатия прокатываемой полосы, который содержит из5 меритель относительного обжатия, датчики скорости полосы, датчик скорости и интегратор пути нажимных винтов, узел сравнения и задания (вход Задание) величин требуемого отно10сительного обжатия полосы, релейный усилитель с зоной нечувствительности, выход которого соединен с входом системы управления электроприводом нажимнь|Х винтов 1,2,
15
Недостатком этого устройства является то, что оно не обеспечивает качество дрес 51руемого металла.
Цель изобретения - улучшение каче2д ства дрессируемого металла.
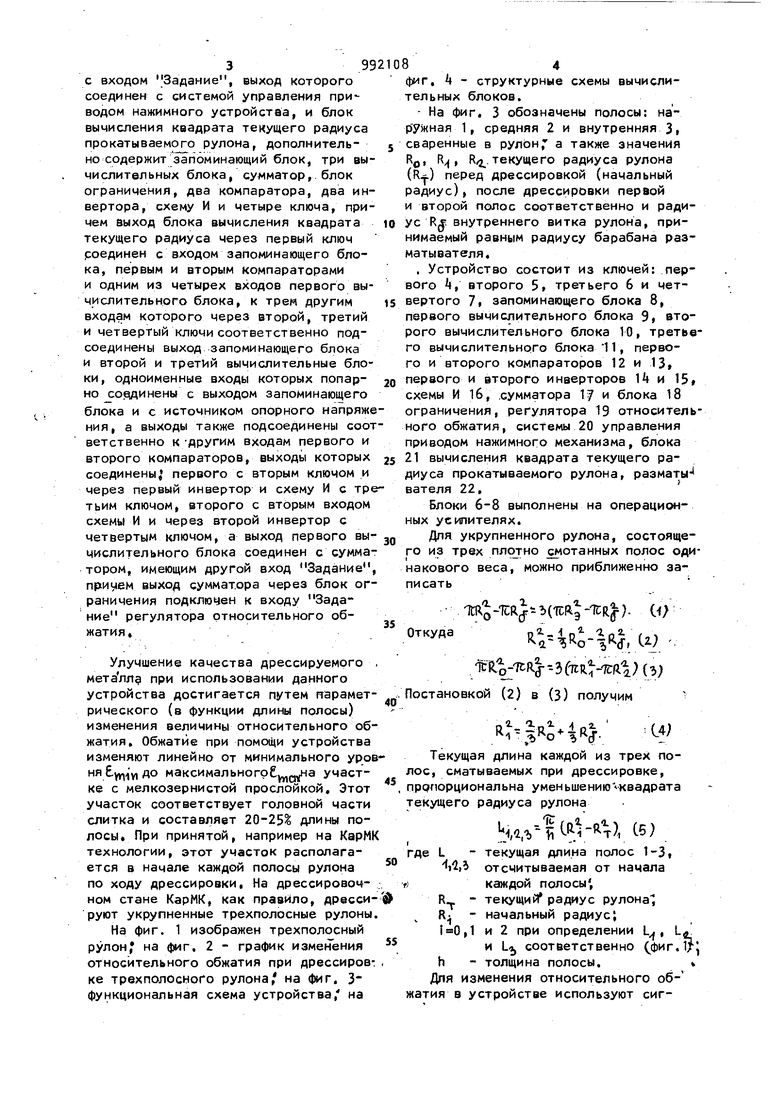
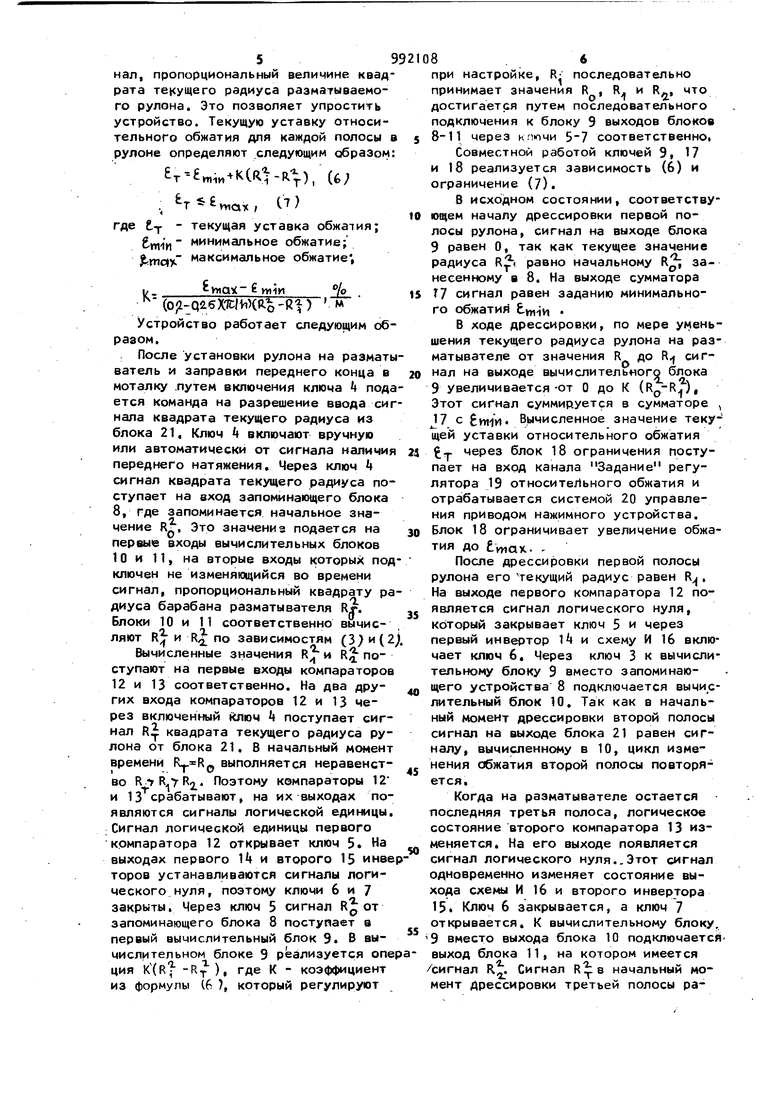
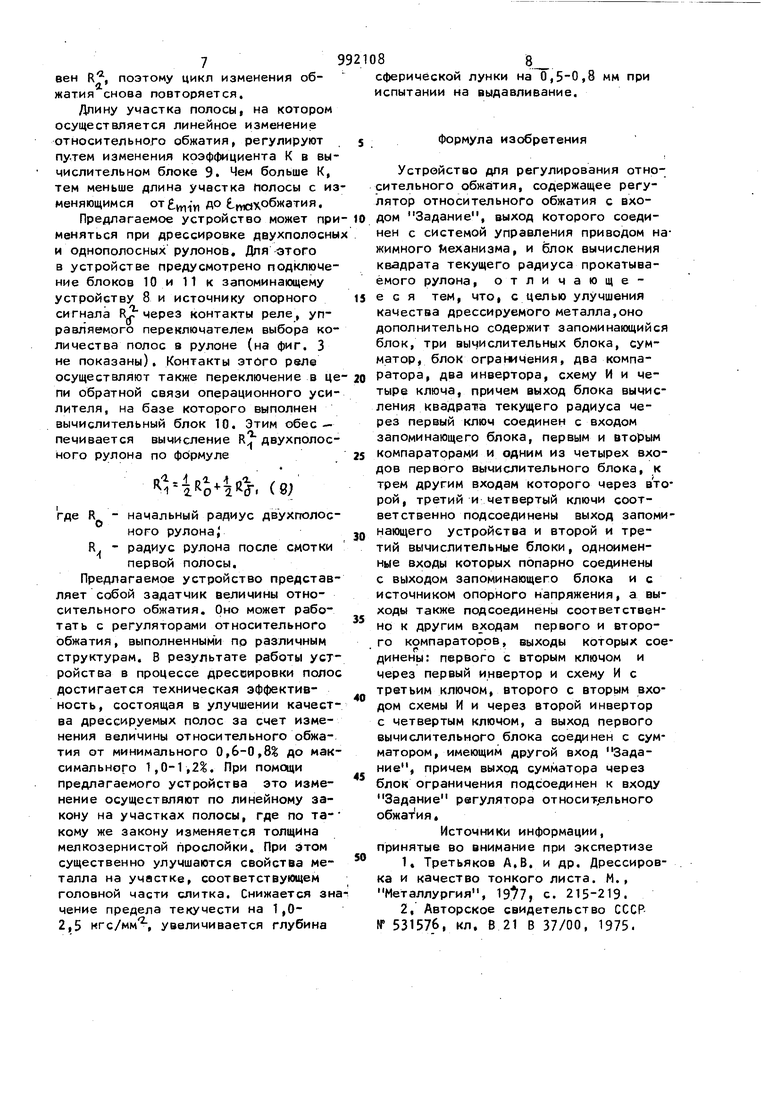
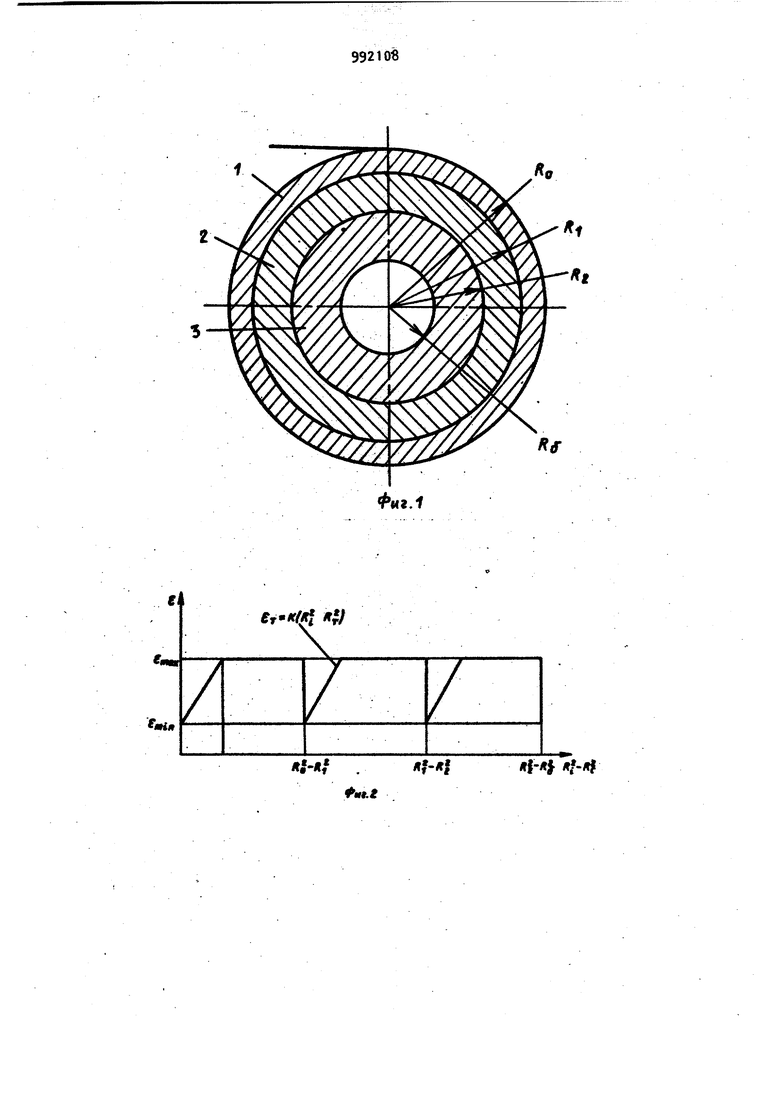
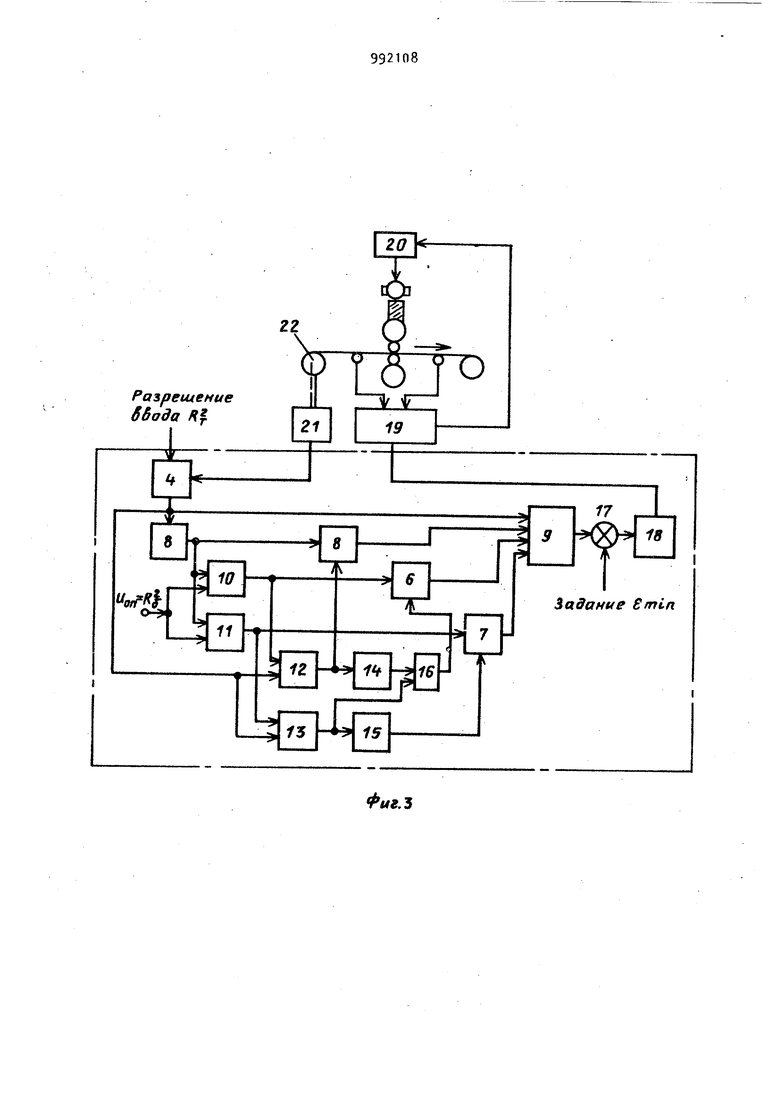
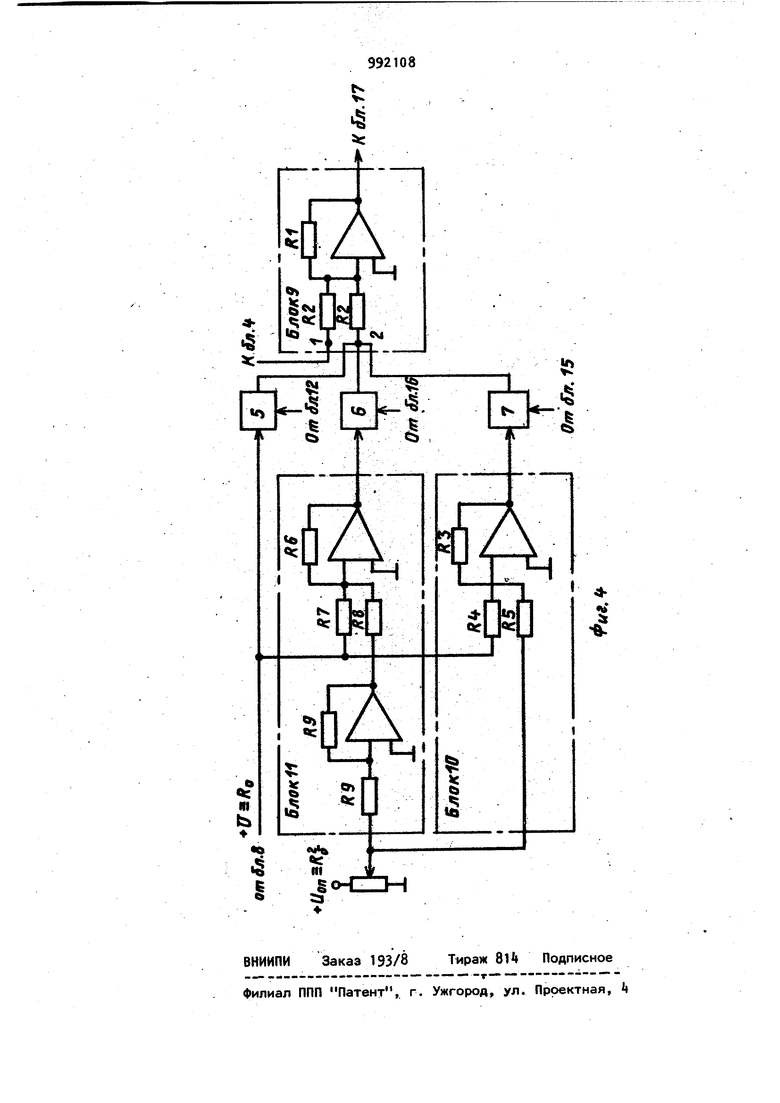
Поставленная цель достигается тем, что устройство для регулирования относительного обжатия, содержащее регулятор относительного обжатия соединен с системой управления приводом нажимного устройства, и блок вычисления квадрата текущего радиуса прокатываемого рулона, дополнительно содержит запоминающий блок, три вычислительных блока, сумматор, блок ограничения, два компаратора, два инвертора, схему И и четыре ключа, причем выход блока вычисления квадрата текущего радиуса через первый ключ роединен с входом запоминающего блока, первым и вторым компараторами и одним из четырех входов первого вычислительного блока, к трем другим входам которого через второй, третий и четвертый ключи соответственно подсоединены выход запоминающего блока и второй и третий вычислительные блоки, одноименные входы которых попарно соединены с выходом запоминающего блока и с источником опорного напряже ния, а выходы также подсоединены соот ветственно к-другим входам первого и второго компараторов, выходь которых соединены первого с вторым ключом и через первый инвертор и схему И с тре тьим ключом, второго с вторым входом схемы И и через второй инвертор с четвертым ключом, а выход первого вычислительного блока соединен с сумматором, имеющим другой вход Задание, приуем выход сумматора через блок ограничения подключен к входу Задание регулятора относительного обжатия. Улучшение качества дрессируемого металлд при использовании данного устройства достигается путем парамет(V В функции длины полосы; изменения величины относительного обжатия. Обжатие при помощи устройства изменяют линейно от минимального максимального д а участке с мелкозернистой прослойкой. Этот участок соответствует головной части слитка и составляет 20-25 длины полосы. При принятой, например на КарМК технологии, этот участок располагается в начале каждой полосы рулона по ходу дрессировки. На дрессировочном стане КарМК, как правило, дрессируют укрупненные трехполосные рулоны На фиг. 1 изображен трехполосный рулон, на фиг, 2 - график изменения относительного обжатия при дрессиров: ке трехполосного рулона, на фиг, 3 функциональная схема устройства, на тельных блоков. - На фиг. 3 обозначены полосы: наружная 1 , средняя 2 и внутренняя 3| сваренные в рулон, а также значения RO 4 . текущего радиуса рулона (R) перед дрессировкой (начальный радиус), после дрессировки первой и второй полос соответственно и радиус Rg. внутреннего витка рулона, принимаемый равным радиусу барабана разматы ват ел я, . Устройство состоит из ключей: первого , второго 5 третьего 6 и четвертого 7| запоминающего блока 8, первого вычислительного блока 9, второго вычислительного блока 10, третьего вычислительного блока 11, первого и второго компараторов 12 и 13, первого и второго инверторов 14 и 15, схемы И 1б, .сумматора 17 и блока 18 ограничения, регулятора 19 относительного обжатия, системы 20 управления приводом нажимного механизма, блока 21 вычисления квадрата текущего радиуса прокатываемого рулона, разматы- вателя 22, Блоки 6-8 выполнены на операционных усилителях. Для укрупненного рулона, состоящего из трех плотно умотанных полос одинакового веса, можно приближенно записать(). (О .(2.) Откуда 1tR.VTtRj--3fTtR rR ;(3; Постановкой (2) в (З) получим J o4RjТекущая длина каждой из трех полос, сматываемых при дрессировке, пррпорциональна уменьшению квадрата текущего радиуса рулона Ча,),С5} где L - текущая длина полос 1-3, Д отсчитываемая от начала каждой полосы, R. - текущий радиус рулона R - начальный радиус; ,1 и 2 при определении Ц, . и Ц соответственно (фиг. h - толщина полосы, Для изменения относительного обжатия в устройстве используют сигнал, пропорциональный величине квадрата текущего радиуса разматываемого рулона. Это позволяет упростить устройство. Текущую уставку относительного обжатия для каждой полосы рулоне определяют следующим образом т-еи,)/(б; , ,ax, О) текущая уставка обжатия; где &т минимальное обжатие; максимальное обжатие; niax )п1и (OJl-Q XKlViKR -R) Устройство работает следующим об разом. После установки рулона на разматы ватель и заправки переднего конца в моталку .путем включения ключа под ется команда на разрешение ввода си нала квадрата текущего радиуса из блока 21, Ключ Ц включают вручную или автоматически от сигнала наличия переднего натяжения. Через ключ k сигнал квадрата текущего радиуса поступает на вход запоминающего блока 8, где запоминается начальное значение Rp, Это значениз подается на первые входы вычислительных блоков 10 и 11, на вторые входы которых под ключен не изменяющийся во времени сигнал, пропорциональный квадрату ра диуса барабана разметывателя R. Блоки 10 и 11 соответственно вычисляют R и R по зависимостям (З; и(2 Вычисленные значения R и R поступают на первые входы компараторов 12 и 13 соответственно. На два других входа компараторов 12 и 13 через включенный йлюч k поступает сигнал R квадрата текущего радиуса рулона от блока 21. В начальный момент времени выполняется неравенство R-rR- R. Поэтому компараторы 12 и 13 срабатывают, на их выходах появляются сигналы логической единицы Сигнал логической единицы первого компаратора 12 открывает ключ 5. На выходах первого k и второго 15 инве торов устанавливаются сигналы логического нуля, поэтому ключи 6 и 7 закрыты Через ключ 5 сигнал RJ от запоминающего блока В поступает а первый вычислительный блок 9. В вычислительном блоке 9 реализуется опе ция КХк| -RT), где К - коэффициент из формулы (б ), который регулируют при настройке, R- последовательно 1 V принимает значения R достигается путем последовательного подключения к блоку 9 выходов блоков 8-11 через клочи Б соответственно, Совместной работой ключей 9, 17 и 18 реализуется зависимость (6) и ограничение (7). В исходном состоянии, соответствующем началу дрессировки первой полосы рулона, сигнал на выходе блока 9 равен О, так как текущее значение радиуса R3« равно начальному R занесенному в 8. На выходе сумматора 17 сигнал равен заданию минимального обжатия &vniH В ходе дрессировки, по мере уменьшения текущего радиуса рулона на разматывателе от значения R до R сигнал на выходе вычислительного блока 9 увеличивается-от О до К ()i Этот сигнал суммируется в сумматоре 17 с raitl Вычисленное значение текущей уставки относительного обжатия -т- через блок 18 ограничения поступает на вход канала Задание регулятора 19 относительного обжатия и отрабатывается системой 20 управления приводом нажимного устройства. Блок 18 ограничивает увеличение обжатия до екиах.. После дрессировки первой полосы рулона его текущий радиус равен R , На выходе первого компаратора 12 появляется сигнал логического нуля, который закрывает ключ 5 и через первый инвертор 1 и схему И 16 включает ключ 6. Через ключ 3 к вычислительному блоку 9 вместо запоминающего устройства 8 подключается вычислительный блок 10, Так как в начальный момент дрессировки второй полосы сигнал на выходе блока 21 равен сигналу, вычисленному в 10, цикл изменения обжатия второй полосы повторяется. Когда на разматывателе остается последняя третья полоса, логическое состояние второго компаратора 13 изменяется. На его выходе появляется сигнал логического нуля..Этот сигнал одновременно изменяет состояние выхода схемы И 16 и второго инвертора 15. Ключ 6 закрывается, а ключ 7 открывается, К вычислительному блоку. 9 вместо выхода блока 10 подключаете выход блока 11, на котором имеется Сигнал начальный мосигнал R мент Дрессировки третьей полосы равен R, поэтому цикл изменения обжатия снова повторяется. Длину участка полосы, на котором осуществляется линейное изменение относительного обжатия, регулируют путем изменения коэффициента К в вы числительном блоке 9. Чем больше К, тем меньше длина участка полосы с и меняющимся от.-у, до ,у,охобжатия. Предлагаемое устройство может пр меняться при дрессировке двухполосны и однополосных рулонов. Для этого в устройстве предусмотрено подключе ние блоков 10 и 11 к запоминающему устройству 8 и источнику опорного сигнала R. п через контакты реле, управляемого переключателем выбора ко личества полос в рулоне (на фиг. 3 не показаны). Контакты этйго реле осуществляют также переключение в ц пи обратной связи операционного уси лителя, на базе которого выполнен вычислительный блок 10. Этим обес- печивается вычисление R двухполос ного рулона по фбрмуле . in-i (б; где R - начальный радиус двухполос ного рулона радиус рулона после смотки первой полосы. Предлагаемое устройство представ ляет собой задатчик величины относительного обжатия. Оно может работать с регуляторами относительного обжатия, выполненными пр различным структурам. В результате работы уст ройства в процессе дрессировки поло достигается техническая эффективность, состоящая в улучшении качест ва дрессируемых полос за счет изменения величины относительного обжатия от минимального 0,6-0,8% до мак симального 1,0-1,2%. При помощи предлагаемого устройства это изменение осуществляют по линейному закону на участках полосы, где по такому же закону изменяется толщина мелкозернистой прослойки. При этом существенно улучшаются свойства металла на участке, соответствующем головной части слитка. Снижается зн чение предела текучести на 1,02,5 кгс/мм, увеличивается глубина 9921088 сферической лунки на 0,,8 мм при испытании на выдавливание. формула изобретения Устройство для регулирования относительного обжатия, содержащее регулятор относительного обжатия с входом Задание, выход которого соединен с системой управления приводом нажимного Механизма, и блок вычисления квадрата текущего радиуса прокатываемого рулона, отличающееся тем, что, с целью улучшения качества дрессируемого металла,оно дополнительно содержит запоминающийся блок, три вычислительных блока, сумматор, блок ограничения, два компаратора, два инвертора, схему И и четыре ключа, причем выход блока вa 4иcления квадрата текущего радиуса через первый ключ соединен с входом запоминающего блока, первым и вторым компараторами и одним из четырех входов первого вычислительного блока, к трем другим входам которого через второй, третий и четвертый ключи соответственно подсоединены выход запоминающего устройства и второй и третий вычислительные блоки, одноименные входы которых попарно соединены с выходом запоминающего блока и с источником опорного напряжения, а выходы также подсоединены соответственно к другим входам первого и второго компараторов, выходы которых соединены: первого с вторым ключом и через первый инвертор и схему И с третьим ключом, второго с вторым входом схемы И и через второй инвертор с четвертым ключом, а выход первого вычислительного блока соединен с сумматором, имеющим другой вход Задание, причем выход сумматора через блок ограничения подсоединен к входу Задание регулятора относит ельного обжаУия, Источники информации, принятые во внимание при экспертизе 1,Третьяков А,В. и др. Дрессировка и качество тонкого листа. М., Металлургия, , с. 215-219. 2,Авторское свидетельство СССР № 531576, кл, В 21 В 37/00, 1975.
ЛП7
л;-я/ .
Лг.г
Разреиление бВода R
Фиг.Ъ
