Изобретение относится к машиностроению и может быть использовано при создании промлшленных роботов и автооператоров .
Известна кисть манипулятора, содержащая корпус с осью качания, конический дифференциал, выходная шестерня которого установлена на корпусе силового цилиндра, кинематически связанного со схватом 1 .
В известной конструкции силовой цилиндр, схват, ось вращения, выходная шестерня дифференциала, расположенные по одну сторону от оси качания, во время работы вызывают повышенные динамические нагрузки на ось качания, что ведет к снижению долговечности опор оси качания, увеличению массы оси качания, а значит к снижению грузоподъемности руки манипулятора.
Цель изобретения - снижение динамических нагрузок на ось качания корпуса.
Поставленная цель достигается тем, что кисть манипулятора снабжена полым валом, установленным на оси качания корпуса с возможностью поворота относительно продольной оси силового цилиндра, при этом на одном конце полого вала смонтирован схват, а на другом - корпус силового цилиндра, причем шток силового цилиндра расположен в полом валу.
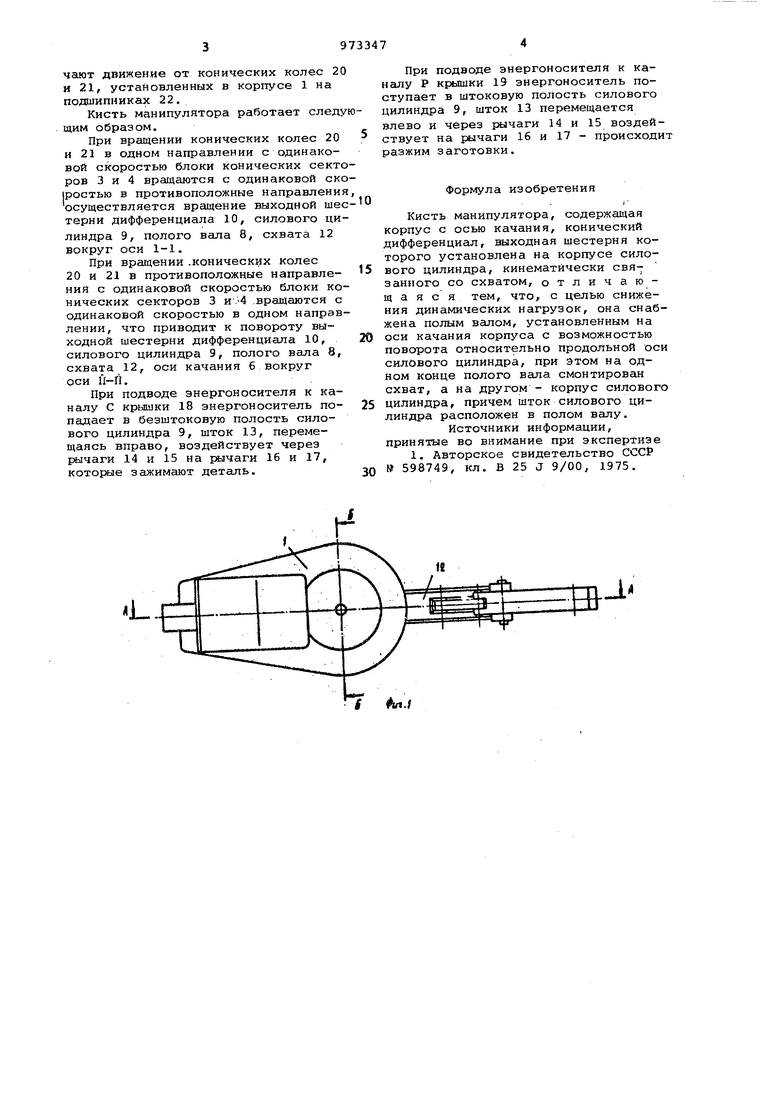
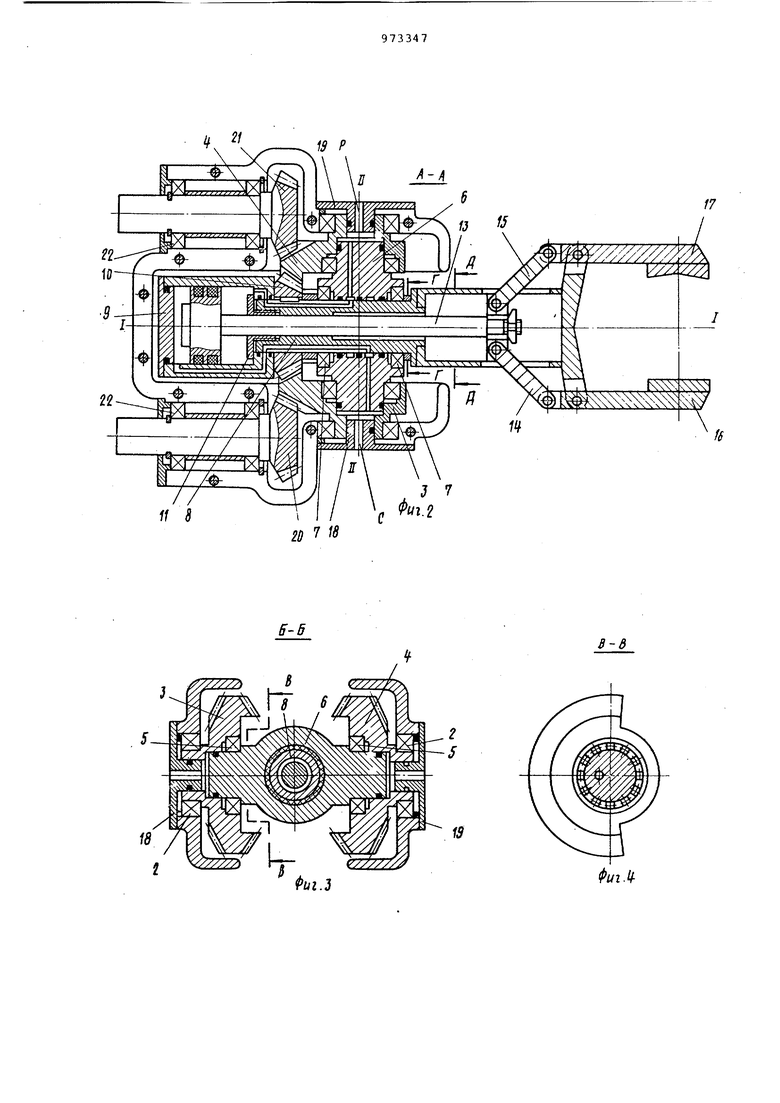
На фиг.1 представлена кисть, общий вид на фиг.2 - разрез А-А на
фиг.1; на фиг.З
сечение Б-Б на
фиг.1; на фиг.4 разрез В-В на
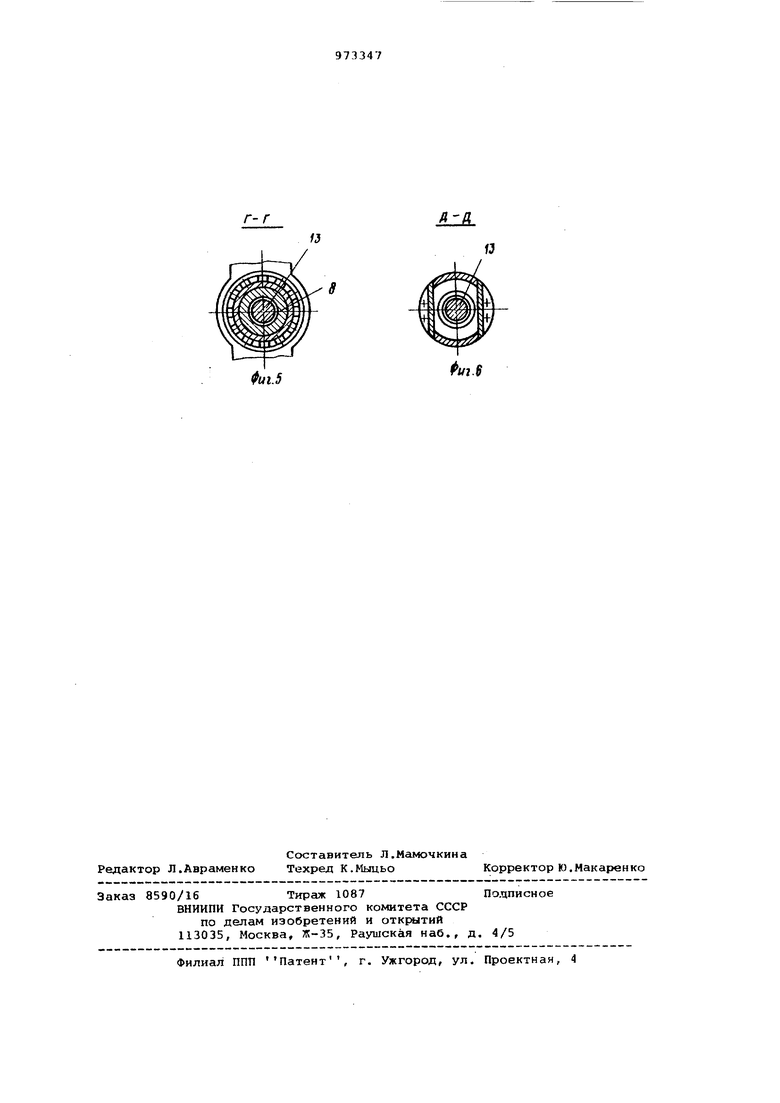
JO фиг.З; на фиг.5 разрез Г-Г на
фиг.2; на фиг.6 разрез Д-Д на
фиг.2.
Кисть манипулятора содержит разьемный корпус 1 с установленными в нем на подшипниках 2 блоками секто15ров 3 и 4. В указанных секторах на подшипниках 5 расположена ось качания 6, в которой на подшипниках 7 установлен полый вал 8. На одном конце полого вала 8 закреплены силовой
20 цилиндр 9 привода схвата и выходная шестерня дифференциала 10 посредством втулки 11. На другом конце полого вала в закреплен схват 12.
Силовой цилиндр 9 посредством
25 штока 13, рычагов 14 и 15 связан с рычагами 16 и 17, крышки 18 и 19, фиксирующие через подглипники 2, б.чо-ки секторов 3 и 4, подшипники 5 и ось качания б, жестко крепятся к Kof-30пусу 1. Блоки секторов 3 и 4 полуЧошзт движение от конических колес 20 и 21, установленных в корпусе 1 на подшипниках 22.
Кисть манипулятора работает следущим образом.
При вращении конических колес 20 и 21 в одном направлении с одинаковой скоростью блоки конических секторов 3 и 4 вращаются с одинаковой ско|ростью в противоположные направления осуществляется вращение выходной шес терни дифференциала 10, силового цилиндра Э, полого вала 8, схвата 12 вокруг оси 1-1.
При вращении .конических колес 20 и 21 в противоположные направлеимя с одинаковой скоростью блоки конических секторов 3 и .4 .вращаются с одинаковой скоростью в одном направлении, что приводит к повороту выходной шестерни дифференциала 10, силового цилиндра 9, полого вала 8, схвата 12, оси качания 6 вокруг оси Il-rt.
При подводе энергоносителя к каналу С крышки 18 энергоноситель попадает в безштоковую полость силового цилиндра 9, шток 13, перемещаясь вправо, воздействует через рычаги 14 и 15 на ялчаги 16 и 17, которые зажимают деталь.
При подводе энергоносителя к каналу Р крышки 19 энергоноситель поступает в штоковую полость силового цилиндра 9, шток 13 перемещается влево и через рычагк 14 и 15 воздействует на ричаги 16 и 17 - происходит разжим заготовки.
Формула изобретения
j
Кисть манипулятора, содержащая корпус с осью качания, конический дифференциал, выходная шестерня которого установлена на корпусе силового цилиндра, кинематически связанного со схватом, отличающаяся тем, что, с целью снижения динамических нагрузок, она снабжена полым валом, установленным на оси качания корпуса с возможностью поворота относительно продольной оси силового цилиндра, при этом на одном конце полого вала смонтирован схват, а на другом - корпус силового цилиндра, причем шток силового цилиндра расположен в полом валу.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство ССС 598749, кл. В 25 J 9/00, 1975.
20 7 18
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Кисть промышленного робота | 1977 |
|
SU621572A1 |
| Рука манипулятора /ее варианты/ | 1983 |
|
SU1199608A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Рука манипулятора | 1983 |
|
SU1151447A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| Манипулятор | 1979 |
|
SU814719A1 |
E-6
B-d
Г- Г
Фи1.5
ALfl.
