(5) РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1979 |
|
SU842702A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающийся регулятор | 1979 |
|
SU847273A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Интегратор с управляемым ограничением выходного сигнала | 1986 |
|
SU1305724A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
Изобретение относится к автомати ческому регулированию технологических процессов, и в частности может &jTb использовано в адаптивных самонастраивающихся системах автоматического регулирования.
Известны регуляторы, содержащие последовательно соединенные сумматор и трехпозиционный нуль-орган, охваченные цепью отрицательной обратной ю связи, состоящей из инерционного звена, формирователя напряжения обратной связи и схемы для дистанционного дискретного и аналогового управления коэффициентом передачи, is
В этих устройствах дистанционное управление коэффициентом передачи осуществляется ступенями путем дискретного изменения номиналов резисторов 2° в цепи заряда инерционного звена и применением в качестве резистора в цепи заряда управляемых сопротивлений Г1 .
Недостатком таких регуляторов являются низкая надежность, обусловлен,ная применением фоторезисторов, и небольшой диапазон изменения коэффициента передачи из-за небольшого количества ступеней дискретного управ ления.
Наиболее близким к предлагаемому по технической сущности является ре гулятор, содержащий блок управления, содержащий операционный усилитель, нагрузочный элемент, первый ключ, второй ключ, последовательно соединенные инерционное звено, сумматор, подключенный вторым входом к первому входу регулятора, трехпозиционный. нуль-орган, подключенный выходом к выходу регулятора С2 1.
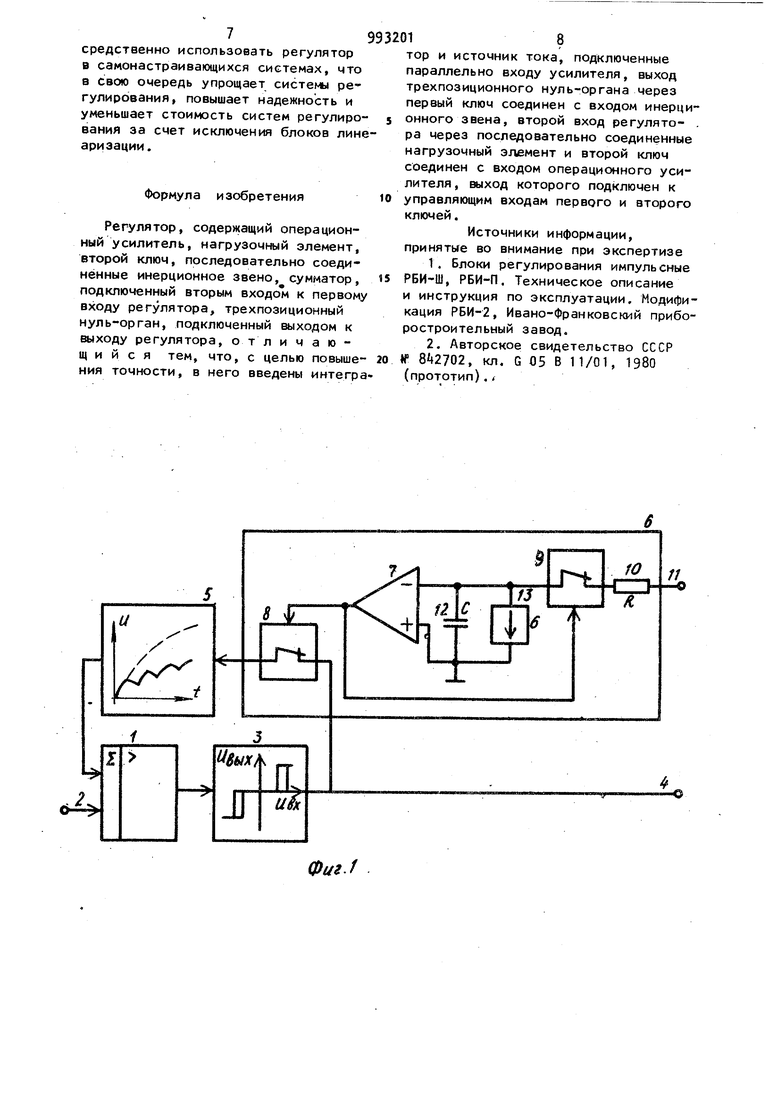
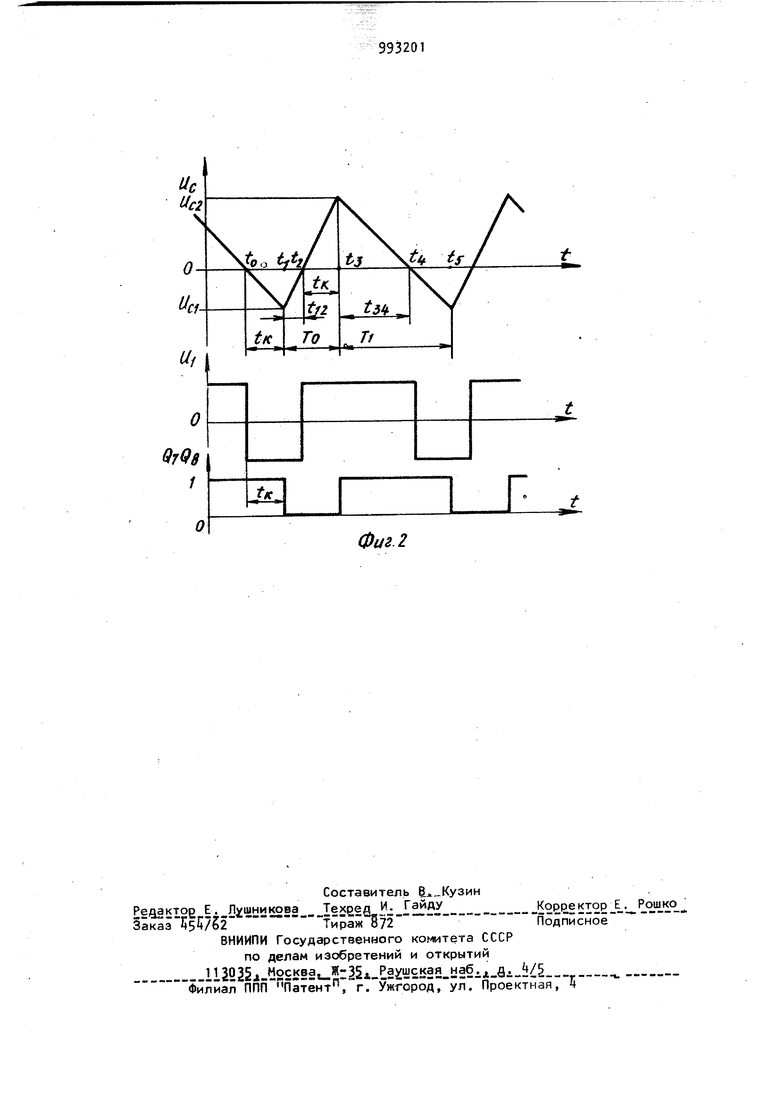
Недостатком этого регулятора является обратно пропорциональная зависимость между коэффициентом переда чи и сигналом управления, что существенно снижает точность установки коэффициента пропорциональности при уп399равляющем сигнале,близком к нулю. Кро ме того, регулятор невозможно использовать без дополнительнрго линеаризующего устройства в самонастраивающихся системах регулирования, в ко-торых, как правило, необходима прямопропорциональная зависимость коэффициента передачи от сигнала управления , Цель изобретения - повышение точности регулятора за счет обеспечения прямопропорциональной зависимости коэффициента передачи от сигнала управления во всем диапазоне изменения управляющего сигнала, что позволит использовать его в самонастраивающих ся системах. Поставленная цель достигается тем, что в регулятор, содержащий операционный усилитель, нагрузочный элемент, первый ключ, второй ключ, последовательно соединенные инерционное звено, сумма тор , подключенный вторым входом к пе вому входу регулятора, трехпозицион.ный нуль-орган, подключенный выходом к выходу регулятора, введены интегра тор и источник тока, подключенные па раллельно входу усилителя, выход- тре ПОЗИЦИОННОГО нуль-органа через первый ключ соединен с входом инерционного звена, второй вход регулятора через последовательно соединенные на грузочный элемент и второй ключ соединен с входом операционного усилителя, выход которого подключен к управляющим входам первого и второго ключей. На фиг, 1 приведена функциональная схема регулятора; на фиг. 2 циклограмма его работы. Регулятор содержит последовательно соединенные сумматор 1, первый вход которого соединен с входом 2 регулятора и трехпозиционный нульорган 3 выход которого подкл эчен к выходу 4 регулятора, охваченные отрицательной обратной связью, состо ящей из инерционного звена 5 и блока 6 управления. Блок 6 управления включает в себя операционный усилитель 7, первый 8 и второй 9 ключи (например, бесконтактные ключи), входы управления которых соединены с выходом усилителя 7, один из выходов первого ключа-8 соединен с вы4одом трехпозиционного нуль-органа 3 ругой с входом усилителя 7, другой ерез нагрузочный элемент 10 подклюен к второму входу 11 регулятора. Параллельно входу усилителя 7 подоединены интегратор 12 и источик 13 тока. Регулятор работает следующим обазом. При отсутствии сигнала рассогласования между сигналами задания и параетра и отсутствии сигнала управленияа втором входе 11 регулятора, служаем для управления коэффициентом передачи, интегратор 12 заряжается от источника 13 тока и на выходе усилителя 7 появляется управляющий сигнал, замыкающий ключи 8 и 9, напряжение на выходе трехпозиционного нуль-органа 3 отсутствует. Поэтому сигнал на выходе 6 блока управления, а следовательно, и на входе и выходе инер144онного звена 5 отсутствуют. При подаче на второй вход 11 регулятора сигнала с полярностью, противоположной заряду интегратора 12, последний начинает перезаряжаться, при изменении полярности напряжения на интеграторе 12 в момент времени tg сигнал UT на выходе усилителя 7 из меняет полярность на противоположную и по истечении времени t, определяемого инерционностью ключей 8 и 9, последние в момент времени t размыкаются и начинается перезаряд интегратора 12 источником 13 тока от значения напряжения U , до которого интегратор 12 зарядился за время t. При изменении Полярности напряжение на интеграторе 12 в времени „ сигнал и- на выходе усилителя 7 скачком переходит в исходное состояние и по истечении времени i«,определяемом инерционностью ключей 8, 9, последние в момент времени .замыкзются и начинается перезаряд интегратора 12 от значения напряжения U до изменения полярности напряжения на интеграторе 12 в момент времени i . Далее цикл повторяется. Таким образом, блок управления при наличии сигнала управления на втором входе регуляторе 11 работает в автоколебательном режиме, периодически замыкая и размыкая ключи 8 и 9Относительное время нахождения ключей в замкнутом состоянии определ ется по формуле . 4 (j-o; к где Т - время нахождения ключей 8 и 9 в замкнутом состоянии; TQ - время нахождения ключей 8 и 9 в разомкнутом состоянии Лц - время задержки переключения ключей 8 и 9i С - емкость интегратора 12; R - сопротивление нагрузочного элемента (резистора ) в цепи второго входа И регулятора Jr - выходной ток источника тока 13; Эр - ток, протекающий через нагрузочный элемент в цепи вт рого входа 11 регулятора, После математических преобразоваНИИ формула и ) принимает видg::-qp.,JD но учитывая то, что Эд-ражение принимает вид К 0,1 где Ц - величина управляющего сигнала на втором входе 11 регулятора;К - коэффициент управления. Таким образом, блок управления при наличии сигнала управления на втором входе 11 регулятора работает в автоколебательном режиме, относительное время нахождения ключей 8 и 9 в замкнутом состоянии обратно-пропорциональ но сигналу управления на втором входе 11 регулятора. При подаче на первый вход 2 регуля тора сигнала, превышающего порог срабатывания трехпозиционного нуль-органа 3, происходит срабатывание трехпозиционного нуль-органа 3. На его выходе, являющемся Шходом k регулятора, появляется напряжение, которое через ключ 8, эпизодически )0щегося с скважностью , блока 6 управления поступает на вход инерциО1чного звена 5. Сигнал отрицательной обратной связи на выходе инерционного звена 5. а следовательно, и на входе R вы сумматора 1, начнет возрастать и компенсировать входной сигнал до порога отпускания трехпозиционного нуль-органа 3, после чего напряжение на выходе трехпозиционного нуль-органа 3 скамком исчезает, следовательно, исчезает и сигнал на выходе блока 6 управления. Сигнал на выходе инерционного звена 5 начинает плавно уменьшаться, а суммарный сигнал на входе трехпозиционного нуль-органа 3 возрастать до порога срабатывания,после чего происходит его срабатывание, и цикл повторяется. Коэффициент передачи регулятора можнр определить по формуле где Т , - постоянная времени инерционного звена 5 (с ); UQJV- величина среднего значения сигнала на входе инерционного звена 5 Щ процентах-от максимального значения (%}jt Среднее значение выходного сигнала на выходе блока 6 управления .соответственно и на входе инерционного звена 5. определяется формулой .У , (4) выходное напряжение трехпозиционного нуль-органа 3; - коэффициент нахождения в замкнутом состоянии ключа 8. одставляя в формулу ( 3 ) выражения и С), получаем rJ - 1ИХНЛ1( q ) OLf,- IT унт -- IV Э / n К - коэффициент передачи регуля постоянная времени инерционного звена 5; К - коэффициент управления, зависящий от величины сопротивления резистора, включенного в цепь второго входа 11 регулятора, и ,от величины тока источника 13 тока; UHQ- выходное напряжение трехпозиционного нуль-органа 3i - управляющий сигнал на втором входе 11 регулятора. спользование в предлагаемом регуре источника тока и конденсатоозволяет получить прямопропорциьыую зависимость изменения коэф ента передачи регулятора и непосредственно использовать регулятор в самонастраивающихся системах, что в свою очередь упрощает системы регулирования, повышает надежность и уменьшает стоимость систем регулирования за счет исключения блоков лине аризации. Формула изобретения Регулятор, содержащий операционный усилитель, нагрузочный элемент, второй ключ, последовательно соединённые инерционное звено, сумматор, подключенный вторым входом к первому входу регулятора, трехпозиционный нуль-орган, подключенный выходом к выходу регулятора, отличающ и и с я тем, что, с целью повышения точности, в него введены интегра
Фиг 1 18 тор и источник тока, подключенные параллельно входу усилителя, выход трехпозиционного нуль-органа через первый ключ соединен с входом инерционного звена, второй вход регулятора через последовательно соединенные нагрузочный элемент и второй ключ соединен с входом операционного усилителя, выход которого подключен к управляющим входам первого и второго ключей. Источники информации, принятые во внимание при экспертизе 1.БЛОКИ регулирования импульсные РБИ-Ш, РБИ-П, Техническое описание и инструкция по эксплуатации. Модификация РБИ-2, Ивано-Франковский приборостроительный завод. 2,Авторское свидетельство СССР f , кл, G 05 В 11/01, 1980 (прототип).
