(54) ШАГАЮЩИЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Эксцентриковый механизм подъема-опускания подвижной рамы шагающего конвейера | 1990 |
|
SU1795953A3 |
| Шагающий конвейер БНЧ-2 | 1982 |
|
SU1090638A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2024423C1 |
| Шагающий конвейер | 1977 |
|
SU716920A1 |
| Шаговый конвейер | 1981 |
|
SU967905A1 |
| Шагающий конвейер | 1983 |
|
SU1094816A1 |
| Шагающий конвейер | 1980 |
|
SU905165A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| СПОСОБ РАСФАСОВКИ СТАЛЬНЫХ ГВОЗДЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2111907C1 |
| Шаговый конвейер-накопитель | 1977 |
|
SU716921A1 |

1
Изобретение относится к шагающим конвейерам и предназначено преимущественно для многоярусных гидропонных установок для выращивания зеленого корма.
Известен шагающий конвейер с приводом, выполненным в виде вертикальных домкратов 1.
Однако этот конвейер характеризуется значительными габаритами привода и наличием боковых направляющих роликов для подвижной рамы, которые должны быть установлены на неподвижной раме по обе стороны, что усложняет конструкцию конвейера и требует точности изготовления подвижной рамы. Кроме того, этот конвейер неприемлем в многоярусной гидропонной установке, где требуется в межъярусном пространстве размещение аппаратуры для освещения и увлажнения выращиваемого зеленого корма, а также сточных систем.
Наиболее близким к изобретению по технической сущности и достигаемому результату является шагающий конвейер, включающий неподвижную и подвижную рамы, механизм горизонтального перемег щения подвижной рамы и механизм ее подъема с клиньями, установленными на направляющих роликах с возможностью взаимодействия с катками и связанными с силовым цилиндром. При этом имеется копир горизонтального перемещения, который 5 выполнен в виде стационарного корпуса с замкнутым прямоугольным пазом, в котором размещен один из катков 2.
Недостаток известного конвейера заключается в том, что величина вертикального перемещения зависит от диаметра
10 катка и конструктивно возможной толщины перемычки паза, консольно выполненной в копире. В результате высота конвейера достаточно велика.
Целью изобретения является уменьшение габарита конвейера по высоте.
15
Указанная цель достигается тем, что в шагающем конвейере, включающем неподвижную и подвижную рамы, механизм горизонтального перемещения подвижной рамы и механизм ее подъема с клиньями, 20 установленными на направляющих роликах с возможностью взаимодействия с катками и связанными с силовым цилиндром, механизм подъема выполнен в виде расположенных в два ряда направляющих и установленных в них-. с возможностью
перемещения плунжеров,. каждый из которых имеет опорный каток в верхней части и у которых в нижней части закреплен каток, при этом подвижная рама установлена
на опорных катках.
Опорные катки одного ряда выполнены с направляющими буртами.
На фиг. 1 изображена подвижная рама, в исходном положении; на фиг. 2 - то же, в рабочем положении; на фиг. 3 - щагающий конвейер; вид сверху; на фиг. 4 вариант исполнения механизма подъема.
Шагающий конвейер включает неподвижную раму 1, в частности стеллажную металлоконструкцию гидропонной установки, подвижную раму 2, автономные механизмы подъема 3 и горизонтального возвратно-поступательного перемещения 4.
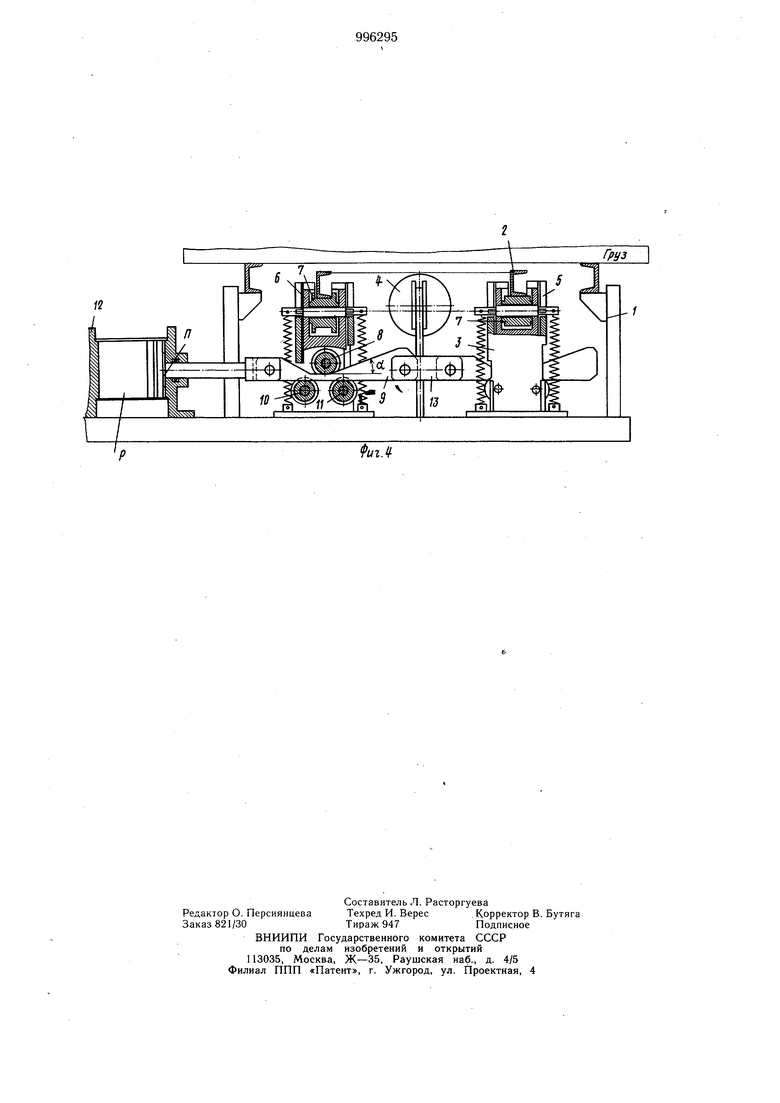
Механизм подъема 3 выполнен в виде расположенных в два ряда направляющих 5 и установленных в них с возможностью перемещения плунжеров 6. Плунжер 6 в верхней части имеет опорный каток 7 для подвижной рамы 2, а в нижней - каток 8, взаимодействующий с клином 9. Клин 9 опирается на направляющие ролики 10 и II и связан со штоком пневмоцилиндра 12 двухстороннего действия. На фиг. 1 и 2 приведен вариант исполнения I, когда пневмоцилиндр 12 выполнен сдвоенным и расположен между параллельно уста1|овленными механизмами подъема.
В исполнении II (фиг. 4) пневмоцилиндр 12 вынесен за пределы неподвижной рамы, и клинья 9 симметрично расположены между собой серьгой 13.
Для направления перемещения подвижной рамы 2 достаточно выполнить катки 7 с буртами только в одном ряду. В другом ряду опорные катки 7 могут быть выполнены с гладкой поверхностью, что конструктивно упрощает подвижную 2 и неподвижную 1 рамы и не требует точности изготовления подвижной рамы 2.
Работа механизма подъема подвижной рамы конвейера осуществляется следующим образом.
При нодаче рабочей среды в полость II пневмоцилиндра 12 клин 9, перемещаясь, поднимает в направляющих 5 плунжер 6 и опирающуюся на катки 7 подвижную раму 2. Подъем рамы 2 осуществляется строго вертикально, что способствует легкому подъему лотков (груза), установленных на конических пальцах. После съема лотков с неподвижной рамы1 включается механизм возвратно-поступательного перемещения 4, и лотки (груз) переносятся на один щаг. Затем рабочая среда подается в полость Р пневмоцилиндра 12, щток пневмоцилиндра 12 с клином 9 втягивается, и плунжер 6 под действием веса рамы ( а в
исполнении II - фиг. 4 - и под действием пружин) опускается. Механизмом 4 подвижная ра.ма 2 возвращается в исходное положение.
Предложенная конструкция компактна, что позволяет экономить производственные площади. В особенности, предложенная конструкция приемлема для многоярусной гидропонной установки.
Формула изобретения
клиньями, установленными на направляющих роликах с возможностью взаимодействия с катками и связанными с силовым цилиндром, отличающийся тем, что, с целью уменьщения габарита конвейера по высоте, механизм подъема выполнен в виде расположенных в два ряда направляющих и установленных в них с возможностью перемещения плунжеров, каждый из которых имеет опорный каток в верхней части и у которых в нижней части закреплен каток, при этом подвижная рама установлена на
опорных катках,
Источники информации, принятые во внимание при экспертизе 1. Плавинский В. И. Мащины непрерывного транспорта. М., «Машиностроение 1969, с. 330-333.
f
«
1
12 J.
