Изобретение относится к перерабогке длинномерных ролокнистых материалов, в частности к устройствам для их измельчения;
Известно устройство для резки волокнистых материалов, содержащее смонтированные в корпусе ножевую головку с приводом вращения, механизм подачи материала к ножевой головке, жестко закрепленный на держателе нож и средство для регулирования положения ножа относительно ножевой головки 1.
Однако данное устройство характеризуется небольшим сроком службы ножей и невысоким качеством резки материала, так как подвижные и неподвижные ножи при пусках и остановках устройств, а также при их холостой работе выкрашиваются и зазубриваются. Выкрашивание происходит в р езультате контактной холодной сварки режущих кромок подвижных и неподвижных ножей, контактирующих друг с , другом со значительными прижилгаыми
усилиями как статического, так и , динамического характера. В результате снижается не только качество резки материала, но и срок службы устройств в целом, так как возникающие
динамические нагрузки уменьшают срок службы всех основных узлов.
Целью изобретения является повышение срока службы ножей.
Поетавленная цель достигается тем,, что в устройстве для резки волокнистых материалов, содержащем основание и смонтирОванные на нем ножевую го10ловку с приводом вращения, механизм подачи материала к ножевой головке, жестко закрепленный на держателе нож и средство для регулирования положения ножа относительно ножевой головки, держатель ножа смонтирован
15 шарнирно на оси, параллельной оси .вращения ножевой головки и кинематически связан с приводом механизма подачи материала или с приводом вра-щения ножевой головки для его пово20рота вокруг оси.
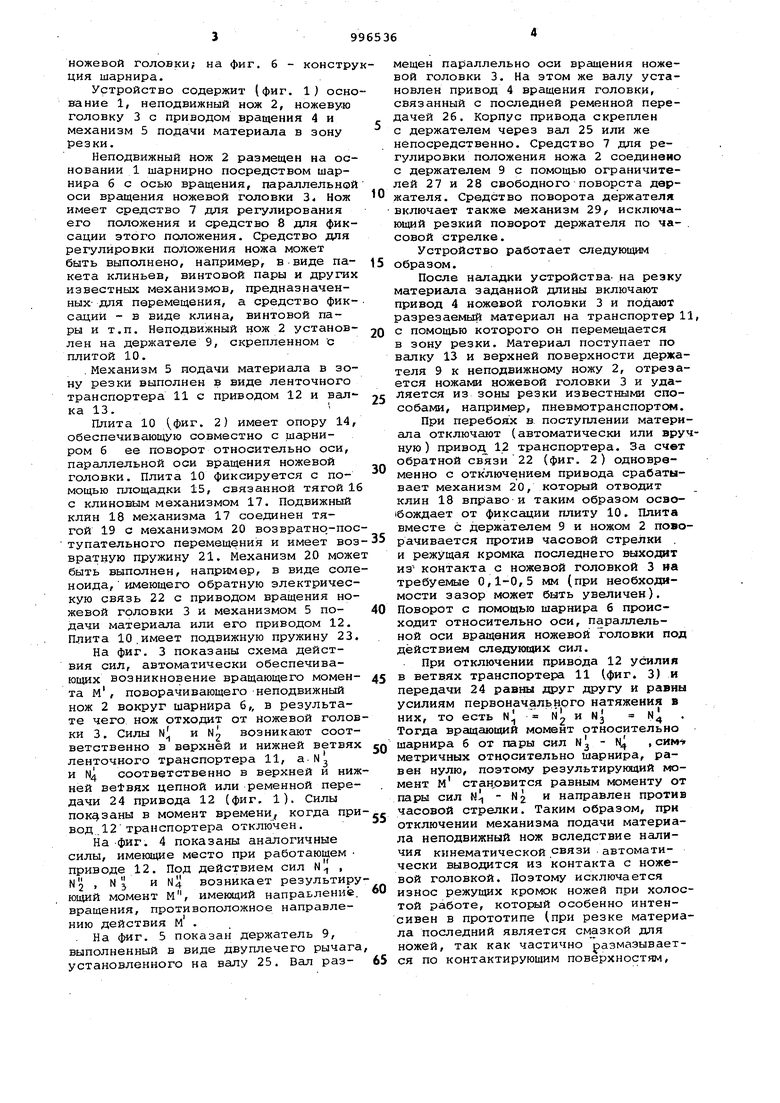
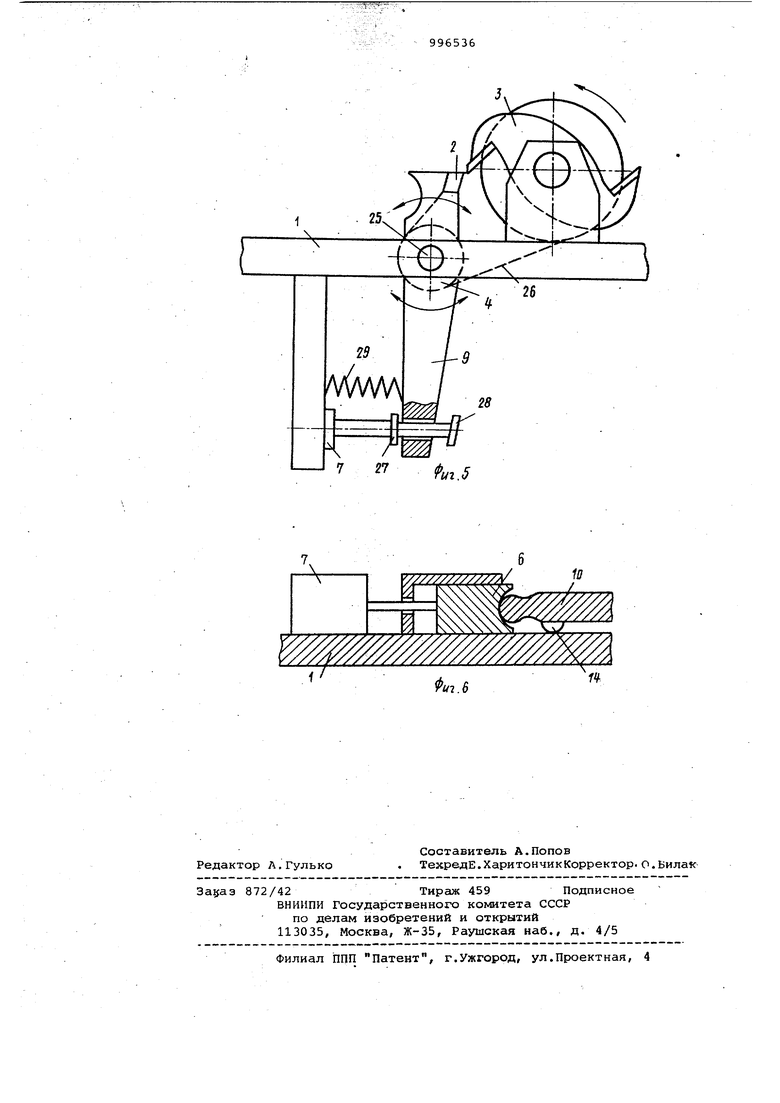
На фиг. 1 изображена схема устройства для резки материалов, продольный разрез; на фиг. 2 - вариант размещения неподвижного ножа на основа25нии; на фиг. 3 и 4 - схема варианта . кинематической связи неподвижного ножа с механизмом подачи материала соответственно при неработающем и работающем механизме подачи;на
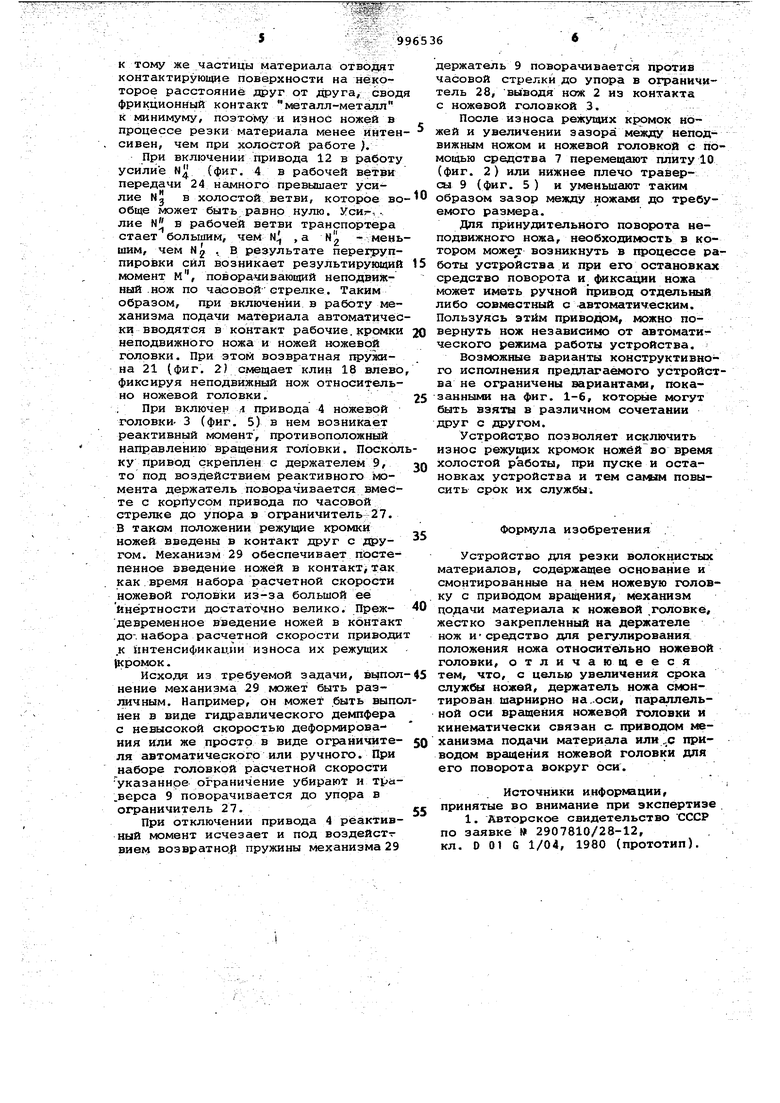
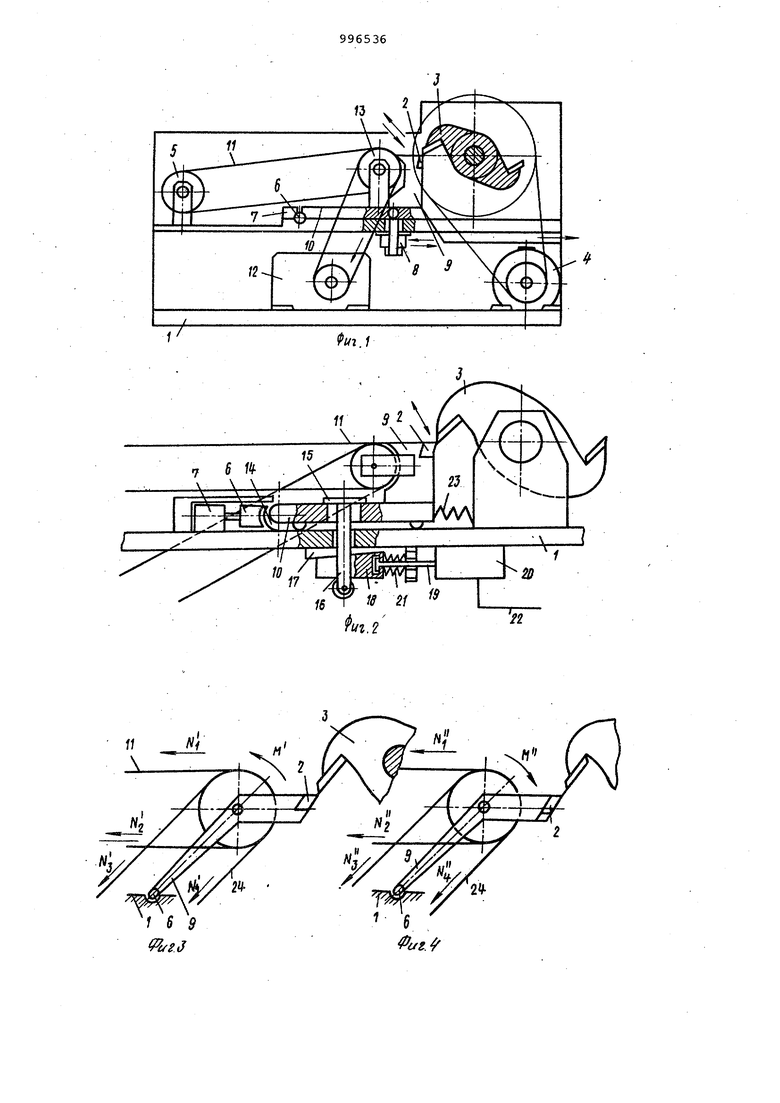
30 фиг. 5 - то же, с приводом вращения ножевой ГОЛОВКИ; на фиг. 6 - констру ция шарнира. Устройство содержит (фиг. 1) осно нание 1, неподвижный нож 2, ножевую головку 3 с приводом вращения 4 и механизм 5 подачи материала в зону резки. Неподвижный нож 2 размещен на основании 1 шарнирно посредством шарнира 6 с осью вращения, параллельной оси вращения ножевой головки 3. Нож имеет средство 7 для регулирования его положения и средство 8 для фиксации этого положения. Средство для регулировки положения ножа может быть выполнено, например, в виде пакета клиньев, винтовой пары и других известных механизмов, предназначенных- для перемещения, а средство фиксаций - в виде клина, винтовой пары и т.п. Неподвижный нож 2 установлен на держателе 9, скрепленном с плитой 10. . Механизм 5 подачи материала в зону резки выполнен в виде ленточного транспортера 11 с приводом 12 и вал ка 13. Плита 10 фиг. 2) имеет опору 14, обеспечивающую совместно с шарниром 6 ее поворот относительно оси, параллельной оси вращения ножевой головки. Плита 10 фиксируется с помощью площадки 15, связанной тягой 16 с клиновым механизмом 17. Подвижный клин 18 механизма 17 соединен тягой 19 с механизмом 20 возвратно-пос тупательного перемещения и имеет воз вратную пружину 21. Механизм 20 може быть выполнен, например, в виде соле ноида, имеющего обратную электрическую связь 22 с приводом вращения ножевой головки 3 и механизмом 5 подачи материала или его приводом 12. Плита 10.имеет подвижную пружину 23. На фиг. 3 показаны схема действия сил, автоматически обеспечивающих возникновение вращающего момента м , поворачивающего неподвижный нож 2 вокруг шарнира б,, в результате чего нож отходит от ножевой голов ки 3. Силы N и N2 возникают соответственно в верхней и нижней ветвях ленточного транспортера 11, а-N и N4 соответственно в верхней и ниж ней ветвях цепной или ременной передачи 24 привода 12 (фиг. 1). Силы показаны в момент времени, когда при вод 12транспортера отключен. На -фиг. 4 показаны аналогичные силы, имеющие место при работающем приводе 12. Под действием сил , N2 , N3 и N4 возникает результиру ющий момент М, имеющий направлений. вращения, противоположное направлению действия М . . На фиг. 5 показан держатель 9, выполненный в виде двуплечего рычага установленного на валу 25. Вал размещен параллельно оси вращения ножевой головки 3. На этом же валу установлен привод 4 вращения головки, связанный с последней ременной передачей 26. Корпус привода скреплен с держателем через вал 25 или же непосредственно. Средство 7 для регулировки положения ножа 2 соединено с держателем 9 с помощью ограничителей 27 и 28 свободного поворота держателя. Средство поворота держателя включает также механизм 29/ исключающий резкий поворот держателя по ча- . совой стрелке. Устройство работает следующим образом. После наладки устройства- на резку материала заданной длины включают привод 4 ножевой головки 3 и подают разрезаемый материал на транспортер 11, с помощью которого он перемещается в зону резки. Материал поступает по валку 13 и верхней поверхности держателя 9 к неподвижному ножу 2, отрезается ножами ножевой головки 3 и удаляется из зоны резки известными способами, например, пневмотранспортом. При перебоях в поступлении материала отключают (автоматически или вручную) привод 12 транспортера. За счет обратной связи 22 (фиг. 2) одновременно с отключением привода срабатывает механизм 20, который отводит клин 18 вправо и таким образом освобождает от фиксации плиту 10. Плита вместе с держателем 9 и ножом 2 поворачивается против часовой стрелки . и режущая кромка последнего выходят из контакта с ножевой головкой 3 иа требуемые 0,1-0,5 мм (при необходимости зазор может быть увеличен). Поворот с помощью шарнира 6 происходит относительно оси, параллельной оси вращения ножевой головки под действием следующих сил. При отключении привода 12 усилия в ветвях транспортера 11 (фиг. 3) и передачи 24 равны друг другу и равны усилиям первоначального натяжения в них, то есть N N2 и Nj N Тогда вращающий момент относительно шарнира 6 от пары сил N - N , симтг матричных относительно шарнира, равен нулю, поэтому результирующий момент м становится равным моменту от пары сил N, - N2 и направлен против часовой стрелки. Таким образом, при отключении механизма подачи материала неподвижный нож вследствие наличия кинематической . . автоматически выводится из контакта с ножевой головкой. Поэтому исключается износ режущих кромок ножей при холостой работе, который особенно интенсивен в прототипе (при резке материала последний является смазкой для ножей, так как частично размазывается по контактирующим поверхностям,
к тому же частицы материала отводят контактирующие поверхности на некоторое расстояние друг от друга, свод фрикционный контакт металл-металл к минимуму, поэтому и износ ножей в процессе резки материала менее йнтенсивен, чем при холостой работе).
При включении привода 12 в работу усилие Njjl (фиг. 4 в рабочей ветви передачи 24 намного превышает усилие Nj в холостой ветви, которое вообще может быть равно нулю. . .. лие N в рабочей ветви транспортера стает большим, чем Ц ,а н - меньшим, чем . В результате перегруппировки сил возникает результирующий момент м, поворачивающий неподвижный .нож по часовой стрелке. Таким образом, при включении в работу механизма подачи материала автоматически вводятся в контакт рабочие. кромки неподвижного ножа и ножей ьюжевой головки. При этой возвратная пружина 21 (фиг. 2) смещает клин 18 влево фиксируя неподвижный нож относительно ножевой головки.
При включен л привода 4 ножевой головки- 3 (фиг. 5) в нем возникает реактивный момент, противоположный направлению вращения головки. Посколку привод скреплен с держателем 9, то под воздействием реактивного момента держатель поворачивается вместе с корпусом привода по часовой стрелке до упора в ограничитель 27. В таком положении режущие кромки ножей введены в контракт друг с другом. Механизм 29 обеспечивает пйртепенное введение ножей в контакт так как.время набора расчетной скорости ножевой головки из-за большой ее инертности достаточно велико. Преждевременное введение ножей в контакт до-набора расчетной скорости приводи к интенсификации износа их режущих (кромок.
Исходя из требуемой задачи, вь1Пол некие механизма 29 может быть раззшчаым. Например, он может быть выпонен в виде гидравлического демпфера с невысокой скоростью деформирования или же просто в виде ограничителя автоматического или ручного. При наборе головкой ра;счетной скорости Оказанное ограничение убирают и тра.верса 9 поворачивается до упора в ограничитель 27.
При отключении привода 4 реактивный момент исчезает и под воздейстт вием возвратно.р пружины механизма 29
держатель 9 поворачивается против часовой стрелки до упора в ограничитель 28, выводя нож 2 из контакта с ножевой головкой 3.
После износа режущих кромок ноже и и у величении зазора между неподвижным ножом и ножевой головкой с помощью средства 7 перемещают плиту 10 (фиг. 2) или нижнее плечо траверсы 9 (фиг. 5 ) и уменьшают таким образом зазор между ножами до требуемого размера.
Для принудительного поворота неподвижного ножа, необходимость в котором может возникнуть в процессе работы устройства и при его остановках средство поворота и |в1ксации ножа может иметь ручной тривод отдельный либо совместный с автоматическим. Пользуясь этим приводом, можно повернуть нож независимо от автомати ческого режима работы устройства.
Возможные варианты конструктивного исполнения предлагаемого устройства не ограничены вариантами, показанньзми на фиг. 1-6, которые могут быть взяты в различном сочетании друг с другом.
Устройст.во позволяет исключить износ режущих кромок ножей во время холостой работы, при пуске и остановках устройства и тем самым повысить срок их службы.
Формула изобретения
Устройство для резки волокнистых материалов, содержащее основание и смонтированные на нем ножевую головку с приводом вращения, механизм подачи материала к ножевой головке, жестко закрепленный на держателе нож и-средство для регулирования положения ножа относительно ножевой головки, отличающееся тем, что, с целью увеличения срока служ&л ножей, держатель ножа смонтирован шарнирно на ..оси, параллельной оси вращения ножевой головки и кинематически связан с. приводом механизма подачи материала или ..с приводом вращения ножевой головки для его поворота вокруг оси.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке 2907810/28-12, кл. О 01 G 1/04, 1980 (прототип).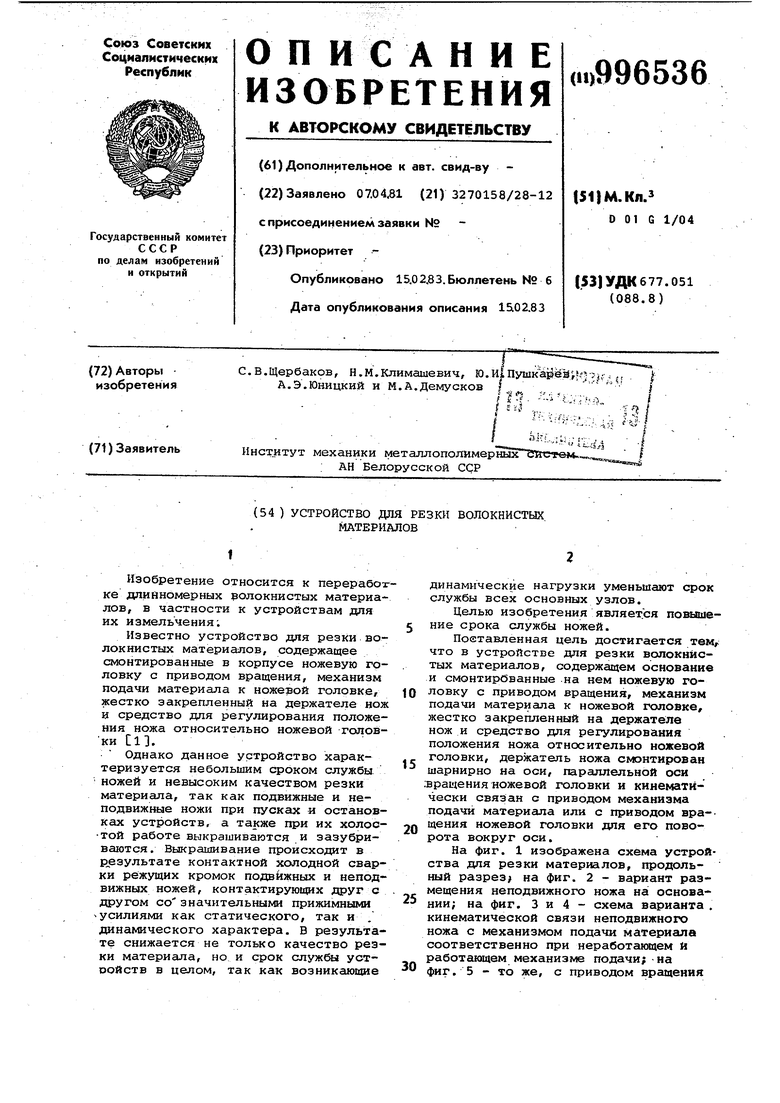
W
