1
Изобретение относится к машиностроению, в частности к транспортно-загрузочным устройствам автоматических линий, преимущественно для транспортировки изделий тийа втулок.
Известно устройство для загрузки и выгрузки изделия, выпол.ненное в виде перемещаемой вертикально от гидроцилиндра колонны с захватным органом имеющей возможность поворота вокруг вертикальной оси 1.
Однако в данном устройстве операции подъема, поворота и опускания изделия происходят последовательно, т. е. имеют место большие потери по времени, кроме того, устройство сложно по конструкции изза наличия целого ряда механизмов подъема, поворота и установки изделия на транспортере.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство для передачи изделий между конвейерами, расположенными на разных высотных уровнях, включающее установленные на стойке поворотные от привода в вертикальной плоскости рычаги с грузозахватным органом 2.
Недостатком известного устройства является низкая производительность, так как при передаче изделий между конвейерами требуется время для захвата и разъединения захватного органа с изделием. Кроме того, применение дополнительного передающего устройства усложняет конструкцию устройства в целом, что cнижaet надежность его работы.
Целью изобретения является повыщение производительности и надежности работы
10 устройства.
Указанная цель достигается тем, что в устройстве для передачи изделий между конвейерами, расположенными на разных высотных уровнях, включающем установ15 ленные на стойке поворотные от привода в. вертикальной плоскости, рычаги с грузозахватным органом, связь грузозахватного органа и рычагов со стойкой выполнена в виде параллельных валов, при этом грузозахватный орган выполнен в виде штыря и имеет механизм поворота, выполненный в виде горизонтального и вертикального валов, связанных посредством конической пары и шестерен, одна из которых связана с горизонтальным валом, а другая укреплена на одном из параллельных валов, связывающим грузозахватный орган с одним из рычагов.
Кроме того, шестерня горизонтального вала выполнена с кольцевым назом, имеет размещенный в нем гибкий элемент и связана с горизонтальным валом посредством поводка, установленного на последнем с возможностью взаимодействия с гибким элементом.
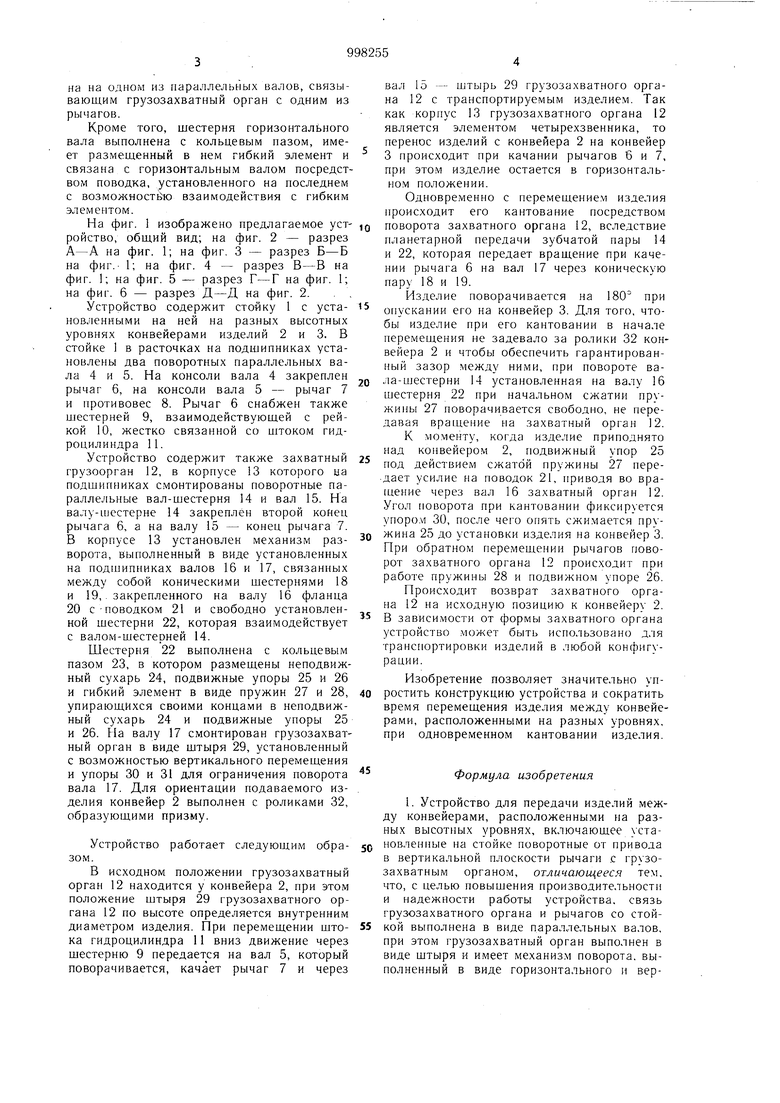
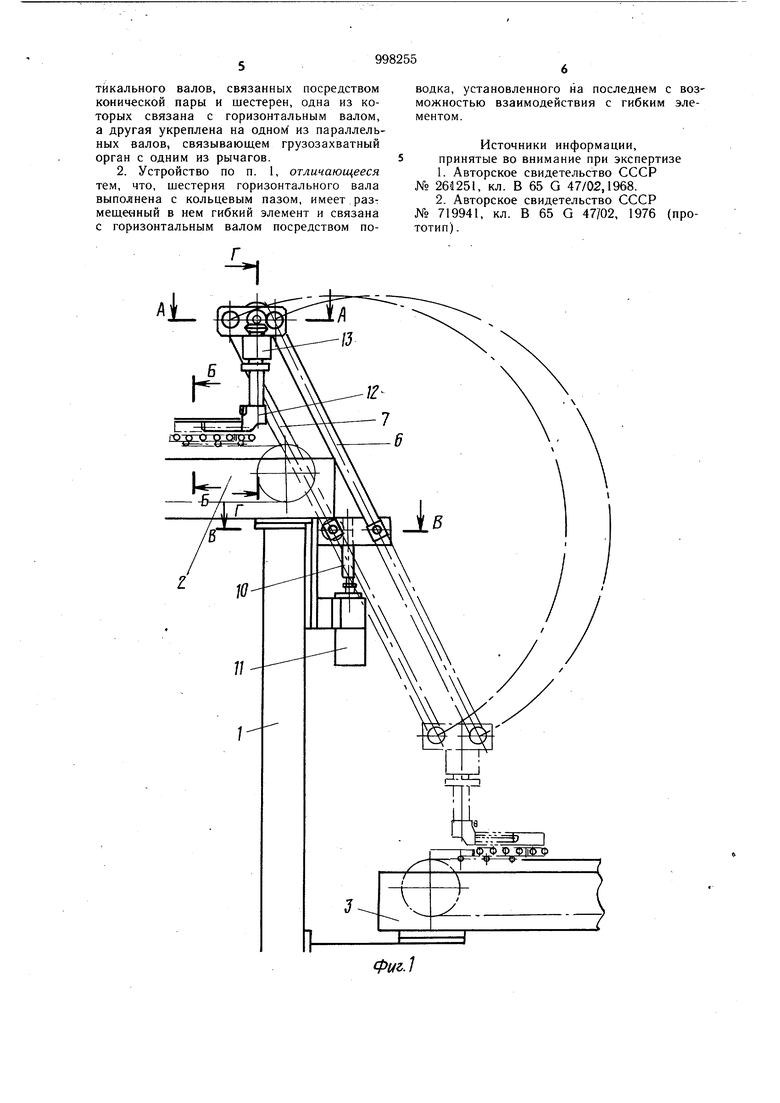
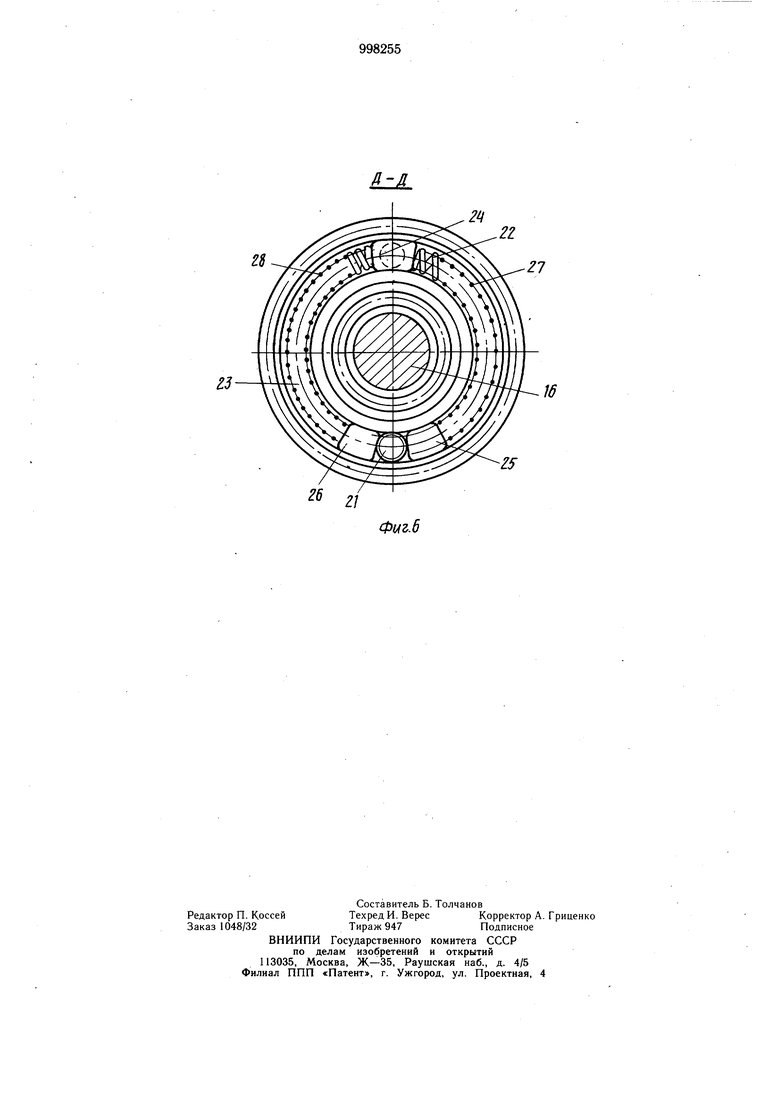
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг.- 1; на фиг. 4 - разрез В-В на фиг. ; на фиг. 5 - разрез Г-Г на фиг. 1; на фиг. 6 - разрез Д-Д на фиг. 2. . .
Устройство содержит стойку 1 с установленными на ней на разных высотных уровнях конвейерами изделий 2 и 3. В стойке 1 в расточках на подшипниках установлены два поворотных параллельных вала 4 и 5. На консоли вала 4 закреплен рычаг 6, на консоли вала 5 - рычаг 7 и противовес 8. Рычаг б снабжен также шестерней 9, взаимодействующей с рейкой 10, жестко связанной со щтоком гидроцилиндра 11.
Устройство содержит также захватный грузоорган 12, в корпусе 13 которого ыа подшипниках с.монтированы поворотные параллельные вал-щестерня 14 и вал 15. На валу-шестерне 14 закреплён второй конец рычага 6, а на валу 15 - конец рычага 7. В корпусе 13 установлен механизм разворота, выполненный в виде установленных на подшипниках валов 16 и 17, связанных между собой коническими шестернями 18 и 19,. закрепленного на валу 16 фланца 20 с -поводком 21 и свободно установленной шестерни 22, которая взаимодействует с валом-шестерней 14.
Шестерня 22 выполнена с кольцевым пазом 23, в котором размещены неподвижный сухарь 24, подвижные упоры 25 и 26 и гибкий элемент в виде пружин 27 и 28, упирающихся своими концами в неподвижный сухарь 24 и подвижные упоры 25 и 26. На валу 17 смонтирован грузозахватный орган в виде штыря 29, установленный с возможностью вертикального перемещения и упоры 30 и 31 для ограничения поворота вала 17. Для ориентации подаваемого изделия конвейер 2 выполнен с роликами 32, образующими призму.
Устройство работает следующим образом.
В исходном положении грузозахватный орган 12 находится у конвейера 2, при этом положение штыря 29 грузозахватного органа 12 по высоте определяется внутренним диаметром изделия. При перемещении штока гидроцилиндра 11 вниз движение через шестерню 9 передается на вал 5, который поворачивается, качает рычаг 7 и через
вал 1о - штырь 29 грузозахватного органа 12 с транспортируемым изделием. Так как корпус 13 грузозахватного органа 12 является элементом четырехзвенника, то перенос изделий с конвейера 2 на конвейер 3 происходит при качании рычагов 6 и 7, при этом изделие остается в горизонтальном положении.
Одновре.менно с перемешением изделия происходит его кантование посредством поворота захватного органа 12, вследствие планетарной передачи зубчатой пары 14 и 22, которая передает вращение при качении рычага 6 на вал 17 через коническую пару 18 и 19.
Изделие поворачивается на ISO при опускании его на конвейер 3. Для того, чтобы изделие при его кантовании в начале перемещения не задевало за ролики 32 конвейера 2 и чтобы обеспечить гарантированный зазор между ними, при повороте вала-шестерни 14 установленная на валу 16 шестерня 22 при начальном сжатии пружины 27 поворачивается свободно, не передавая вращение на захватный орган 12.
К моменту, когда изделие приподнято над конвейером 2, подвижный упор 25 под действием сжатой пружины 27 передает усилие на поводок 21, приводя во вращение через вал 16 захватный орган 12. Угол поворота при кантовании фиксируется упоро.м 30, после чего опять сжимается пружина 25 до установки изделия на конвейер 3. При обратном перемешении рычагов поворот захватного органа 12 происходит при работе пружины 28 и подвижном упоре 26.
Происходит возврат захватного органа 12 на исходную позицию к конвейеру 2. В зависимости от формы захватного органа устройств) может быть использовано для транспортировки изделий в любой конфигурации.
Изобретение позволяет значительно упростить конструкцию устройства и сократить время перемещения изделия между конвейерами, расположенными на разных уровнях, при одновременном кантовании изделия.
Формула изобретения
1. Устройство для передачи изделий между конвейерами, расположенными на разных высотных уровнях, включающее установленные на стойке поворотные от привода в вертикальной плоскости рычаги с грузозахватным органом, отличающееся тем, что, с целью повыщения производительности и надежности работы устройства, связь грузозахватного органа и рычагов со стойкой выполнена в виде параллельных валов, при этом грузозахватный орган выполнен в виде щтыря и имеет механиз.м поворота, выполненный в виде горизонтального и вертикального валов, связанных посредством конической пары и шестерен, одна из которых связана с горизонтальным валом, а другая укреплена на одном из параллельных валов, связывающем грузозахватный орган с одним из рычагов.
2. Устройство по п. 1, отличающееся тем, что, шестерня горизонтального вала выполнена с кольцевым пазом, имеет размещенный в нем гибкий элемент и связана с горизонтальным валом посредством поводка, установленного на последнем с возможностью взаимодействия с гибким элементом.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 265251, кл. В 65 G 47/02,1968.
2.Авторское свидетельство СССР
№ 719941, кл. В 65 G 47/02, 1976 (прототип) .
23 гг 16
/
г. J
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи изделий между конвейерами,размещенными на разных уровнях | 1983 |
|
SU1105422A1 |
| Устройство для кантования грузов | 1989 |
|
SU1735191A1 |
| Кран для погрузочно-разгрузочныхОпЕРАций HA пОдВЕСНОМ КОНВЕйЕРЕ | 1979 |
|
SU806587A1 |
| СТЫКОВОЧНЫЙ АГРЕГАТ | 2007 |
|
RU2341447C1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Устройство для перегрузки рулонов | 1987 |
|
SU1546397A2 |
| Захват-кантователь | 1982 |
|
SU1031867A1 |
| Конвейер для межоперационного перемещения изделий | 1981 |
|
SU994373A1 |

.ю
.16
t9
28
Az
Z5
0IAZ.6
