(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПЛАВАЮЩИХ
ГРУЗОВ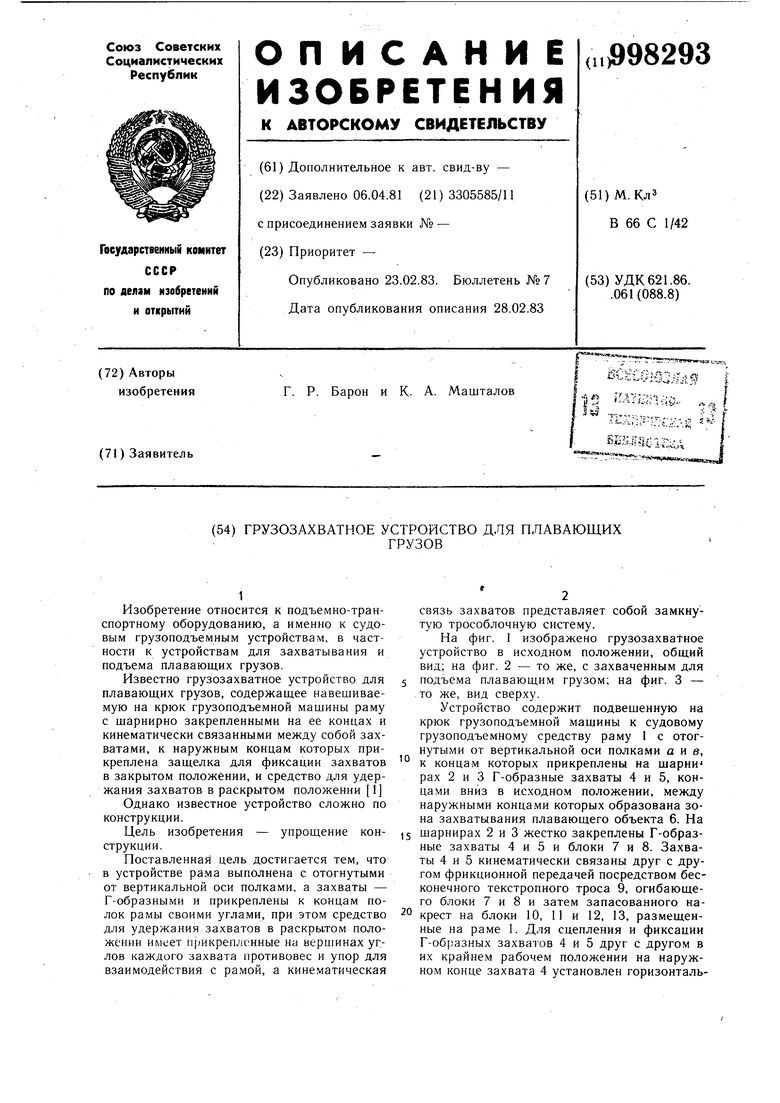
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран для подъема и подачи грузов в оконный проем здания | 1990 |
|
SU1772073A1 |
| Захват для грузов в мягкой таре | 1981 |
|
SU1009970A1 |
| Захватное устройство для грузов сошТыРЕМ и фигуРНОй гОлОВКОй | 1979 |
|
SU816935A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Вилочный захват | 1979 |
|
SU867841A1 |
| Устройство для обслуживания светильников в промышленных зданиях | 1989 |
|
SU1710487A1 |
| Захват-кантователь для колонн | 1982 |
|
SU1071568A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1973 |
|
SU388997A1 |
| Грузозахватное устройство | 1990 |
|
SU1801921A1 |
| Устройство для резки битума | 1983 |
|
SU1090440A1 |
1
Изобретение относится к подъемно-транспортному оборудованию, а именно к судовым грузоподъемным устройствам, в частности к устройствам для захватывания и подъема плавающих грузов.
Известно грузозахватное устройство для плавающих грузов, содержащее навешиваемую на крюк грузоподъемной машины раму с шарнирно закрепленными на ее концах и кинематически связанными между собой захватами, к наружным концам которых прикреплена защелка для фиксации захватов в закрытом положении, и средство для удержания захватов в раскрытом положении 1
Однако известное устройство сложно по конструкции.
Цель изобретения - упрощение конструкции.
Поставленная цель достигается тем, что в устройстве ра.ма выполнена с отогнутыми от вертикальной оси полками, а захваты - Г-образными и прикреплены к концам полок рамы своими углами, при этом средство для удержания захватов в раскрытом положении имеет п|)икрепленные на вершинах углов каждого захвата противовес и упор для взаимодействия с рамой, а кинематическая
связь захватов представляет собой замкнутую трособлочную систему.
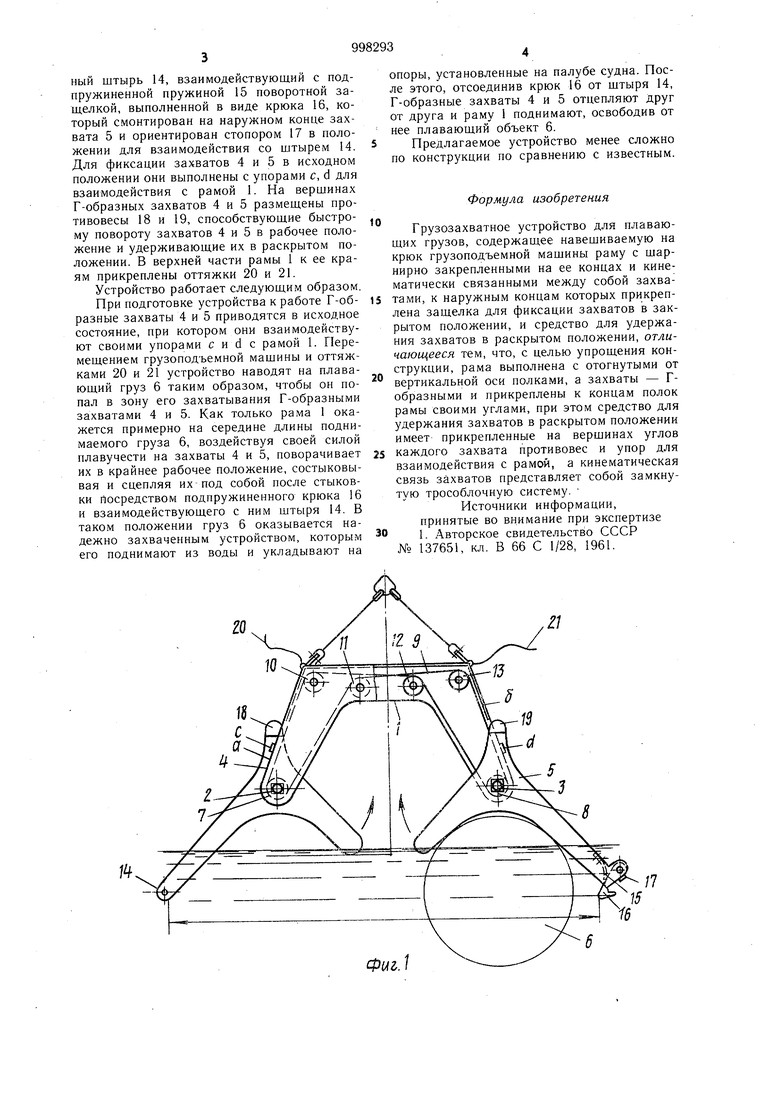
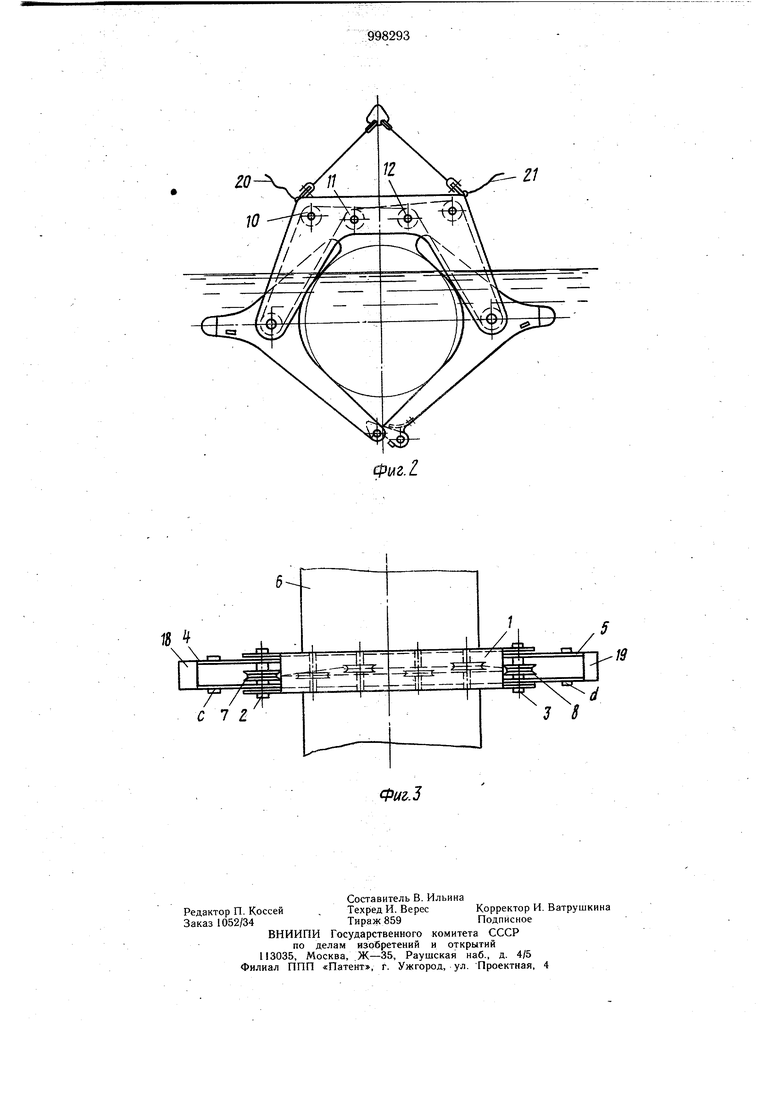
На фиг. 1 изображено rpy3O3axBatHoe устройство в исходном положении, общий вид; на фиг. 2 - то же, с захваченным для подъема плавающим грузом; на фиг. 3 - то же, вид сверху.
Устройство содержит подвешенную на крюк грузоподъемной мащины к судовому грузоподъемному средству раму I с отогнутыми от вертикальной оси полками айв,
10 к концам которых прикреплены на шарни pax 2 и 3 Г-образные захваты 4 и 5, концами вниз в исходном положении, между наружными концами которых образована зона захватывания плавающего объекта 6. На 15 шарнирах 2 и 3 жестко закреплены Г-образные захваты 4 и 5 и блоки 7 и 8. Захваты 4 и 5 кинематически связаны друг с другом фрикционной передачей посредством бесконечного текстропного троса 9, огибающего блоки 7 и 8 и затем запасованного на20крест на блоки 10, 11 и 12, 13, размещенные на раме 1. Для сцепления и фиксации Г-образных захватов 4 и 5 друг с другом в их крайнем рабочем положении на наружном конце захвата 4 установлен горизонтальный штырь 14, взаимодействующий с подпружиненной пружиной 15 поворотной защелкой, выполненной в виде крюка 16, который смонтирован на наружном конце захвата 5 и ориентирован стопором 17 в положении для взаимодействия со штырем 14. Для фиксации захватов 4 и 5 в исходном положении они выполнены с упорами с, d для взаимодействия с рамой 1. На вершинах Г-образных захватов 4 и 5 размещены противовесы 18 и 19, способствующие быстрому повороту захватов 4 и 5 в рабочее положение и удерживающие их в раскрытом положении. В верхней части рамы 1 к ее краям прикреплены оттяжки 20 и 21.
Устройство работает следующим образом.
При подготовке устройства к работе Г-образные захваты 4 и 5 приводятся в исходное состояние, при котором они взаимодействуют своими упорами с и d с рамой 1. Перемещением грузоподъемной машины и оттяжками 20 и 21 устройство наводят на плавающий груз 6 таким образом, чтобы он попал в зону его захватывания Г-образными захватами 4 и 5. Как только рама 1 окажется примерно на середине длины поднимаемого груза 6, воздействуя своей силой плавучести на захваты 4 и 5, поворачивает их в крайнее рабочее положение, состыковывая и сцепляя их-под собой после стыковки йосредством подпружиненного крюка 16 и взаимодействующего с ним штыря 14. В таком положении груз 6 оказывается надежно захваченным устройством, которым его поднимают из воды и укладывают на Ч/V
опоры, установленные на палубе судна. После этого, отсоединив крюк 16 от щтыря 14, Г-образные захваты 4 и 5 отцепляют друг от друга и раму 1 поднимают, освободив от нее плавающий объект 6.
Предлагаемое устройство менее сложно по конструкции по сравнению с известным.
Формула изобретения
Грузозахватное устройство для плавающих грузов, содержащее навещиваемую на крюк грузоподъемной мащины раму с щарнирно закрепленными на ее концах и кинематически связанными между собой захватами, к наружным концам которых прикреплена защелка для фиксации захватов в закрытом положении, и средство для удержания захватов в раскрытом положении, отличающееся тем, что, с целью упрощения конструкции, рама выполнена с отогнутыми от вертикальной оси полками, а захваты - Гобразными и прикреплены к концам полок рамы своими углами, при этом средство для удержания захватов в раскрытом положении имеет прикрепленные на вершинах углов каждого захвата противовес и упор для взаимодействия с рамой, а кинематическая связь захватов представляет собой замкнутую трособлочную систему.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 137651, кл. В 66 С 1/28, 1961.
ZQ
г1
Фиг. I
