Изобретение относится к средствам автоматизации различных процессов, может быть использовано в машиностроении, приборостроении как средство для удержания и перемещения деталей при различ- ных технологических процессах и является усовершенствованием изо- .бретенияпо ает. св.Kb 716810.
Целью изобретения является расширение технологических возможностей схвата за счет исключения прощелкивания плоских пружин при переходе к новому устойчивому положению под воздействием привода.
На чертеже показан схват, общий вид.
Схват содержит корпус 1, закрепленные на нем с помощью шарниров 2 зажимные губки 3 с плоской пружиной 4. Хвостовик каждой губки 3 при помощи шарнира 5 связан с платформой 6, подпружиненной пружиной 7. Перегиб пружины 4 снабжен приводом, выполненным из двух пневматических камер 8 и 9.
Схват работает следующим образом.
В исходном состоянии (покаэрно сплошной линией), при невключенном при- воде, плоская пружина 4 изогнута перегибом в сторону оси схвата, платформа 6 под действием пружины 7 находится в нижнем положении, зажимные губки 3 разведены. При подаче сжатого во.здуха в камер у 8 по- следняя, расширяясь, оказывает давление на перегиб плоской пружины 4. Так как длина плоской пружины 4 болысе, чем расстояние между шарнирами 2 и 5, то плоская
пружина 4 под давлением на перегиб камерой 8 будет получать дополнительный перегиб у шарниров 2 и 5 (показано пунктирной линией) м согласно теореме Лагранжа-Ди- рихле распорная сила плоской пружины 4 будет увеличиваться. Одновременно при увеличении распорной силы плоской пружины 4 платформа б начинает утапливаться, преодолевая сопротивление пружины 7, расстояние мржду шарнирами 2 и 5 увеличивается, прогиб пружины 4 уменьшается (показано пунктирной линией). Плоская пружина 4, переходя среднее неустойчивое по- лож8 ие, под действием распорной силы пружины 7 переходит (выгибается) к новому устойчивому положению (перегибом от оси схвата), что предводит к сведению зажимных губок 3, зажимающих деталь (показано штрмк-пункт фной линией).
При разяеденим зажимных г /бокЗ сжатий воздух гшдается . пневматическую камеру 9 ,а выход камеры 8 соединяется с атмосферой, Камера 9 расширяется и воздействует на перегиб плоской пружины 4.
Ф о р м у л 3 j/i 3 о б р е т е н и я Схват пporvlЬ UJлeннoгo робота по авт. 08. № 716810, о т л и ч а ю ш, и и с я тем, что, с целью расширения технологических возможностей, .хвосто8;/ к каждой зажимной гу(эки шарнирно связан с дополнительно введенной подпружиненной платформой, уст:- иовлекной в корпусе с возможностью, возвратно-поступательного перемещения.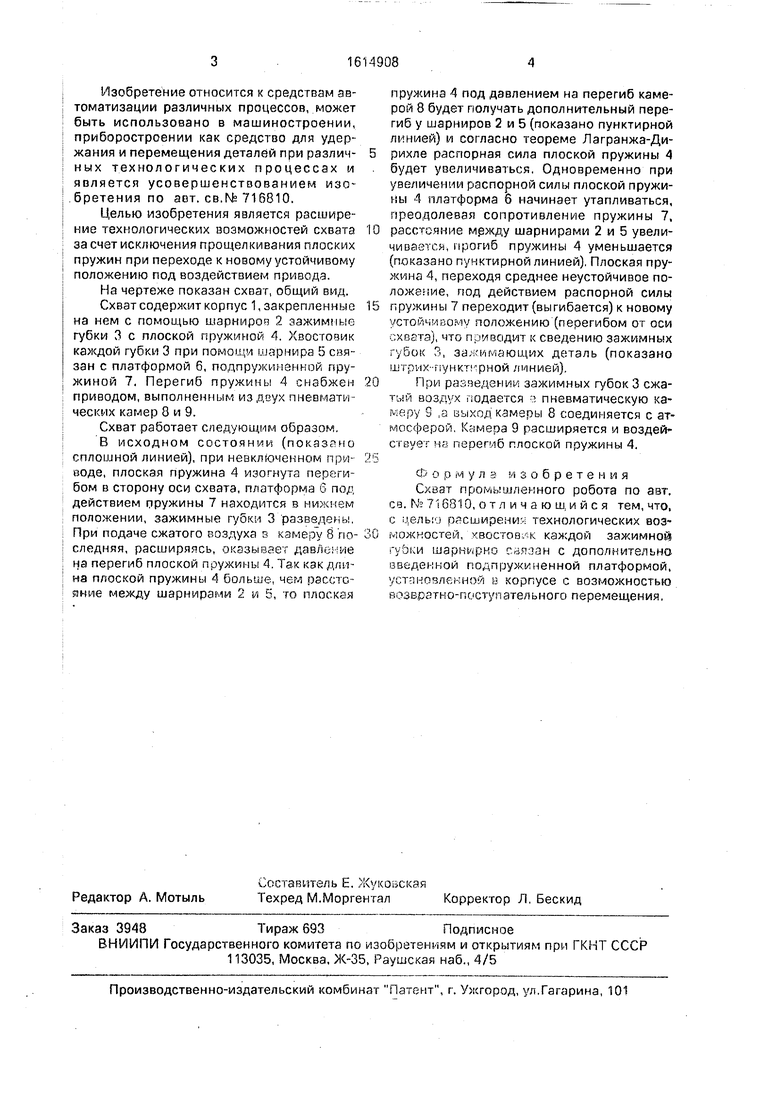
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2008200C1 |
| Схват промышленного робота | 1978 |
|
SU716810A1 |
| Схват промышленного робота | 1985 |
|
SU1255428A1 |
| Схват | 1981 |
|
SU952581A1 |
| Схват промышленного робота | 1982 |
|
SU1033312A1 |
| Схват | 1981 |
|
SU1013201A1 |
| Схват | 1987 |
|
SU1407796A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват робота | 1983 |
|
SU1117205A1 |
Изобретение относится к средствам автоматизации различных процессов и может быть использовано в машиностроении, приборостроении как средство для удержания и перемещения деталей при различных технологических процессах. Целью изобретения является расширение технологических возможностей схвата за счет исключения прощелкивания плоских пружин при переходе к новому устойчивому положению под воздействием привода. Хвостовик зажимных губок 3 при помощи шарнира 5 связан с дополнительно введенной платформой 6, подпружиненной пружиной 7. 1 ил.
| Схват промышленного робота | 1978 |
|
SU716810A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
