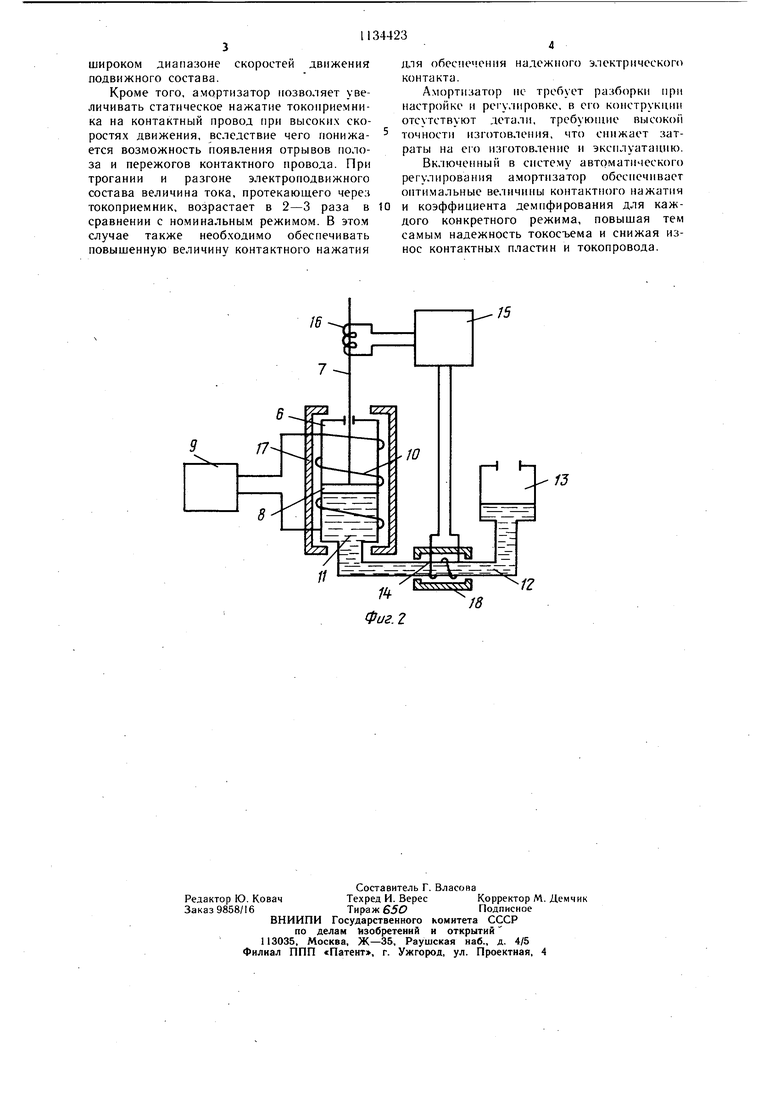
Изобретение относится к транспортной технике,а именно к токоприемникам скоростного электроподвижного состава. Известен токоприемник электропсдвижного состава, содержащий подвижную раму, полоз, каретки, подъемные пружины и соединенный с подвижной рамой гидравлический амортизатор, выполненный в виде корпуса с расположенными в нем поршнем и UJTOKOM 1. Недостатком известного токоприемника является его низкая надежность. Цель изобретения - повышение надежности токосъема. Указанная цель достигается тем, что токоприемник электроподвижного состава, содержащий подвижную раму, полоз, каретки, подъемные пружины и соединенный с подвижной рамой гидравлический амортизатор, выполненный в виде корпуса с расположенными в нем поршнем и штоком. снабжен регуляторами тока, датчиком ско: рости перемещения штока амортизатора соединенны.м с входом первого регулятора тока, и распределительным резервуаром, соединенным посредством перепускного канала с подпоршневым пространством, которое заполнено ферромагнитной жидкостью, причем на корпусе амортизатора закреплена управляющая обмотка, соединенная с вторым регулятором тока, а на перепускном канале установлен магнитный дроссель с управляющей обмоткой, соединенной с выходом первого регулятора. Корпус амортизатора и перепускной канал выполнены немагнитными и снабжены ферромагнитными экранами, охватывающими управляющую обмотку регулятора тока и управляющую обмотку магнитного дросселя. На фиг. 1 показаны основные элементы предлагаемого токоприемника; на фиг. 2 - элементы гидравлического амортизатора. Токоприемник электроподвижного состава состоит из подвижной рамы 1, кареток 2, полоза 3, подъемных пружин 4 и гидравлического амортизатора 5, соединенного с подвижной рамой 1. Основными элементами гидравлического амортизатора являются корпус 6, а также шток 7 с поршнем 8, которые расположены в корпусе. На корпусе амортизатора закреплена равномерно охватывающая его и соединенная с вторым регулятором 9 тока управляющая обмотка 10, а подпоршневое пространство 11 заполнено ферромагнитной жидкостью и через перепускной канал 12 соединено с распределительным резервуаром 13. Перепускной канал 12 снабжен магнитным дросселем с управляющей обмоткой 14, охватывающей перепускной канал 12 и соединенной с выходом первого регулятора 15 тока, вход которого соединен с датчиком 16 скорости перемеш.ения штока 7, например индуктивным. Корпус 6 амортизатора и перепускной канал 12 выполнены из немагнитного материала и снабжены ферромагнитными экранами 17 и 18, охватывающими управляющую обмотку 10 и управляющую обмотку 14 магнитного дросселя. Амортизатор работает следующим образом. При достижении высокой скорости дви жения подвижного состава или увеличении тока, снимаемого токоприемником, регулятор 9 тока подает напряжение на управляющую обмотку 10. Под действием магнитного поля ферромагнитная жидкость втягивается в подпоршневое пространство 11 и воздействует на поршень 8, поднимая его ввер.х и увеличивая статическое нажатие токоприемника на контактный провод. Сила давления жидкости на поршень 8 регулируется величиной напряжения в управляющей обмотке 10. При вертикальных динамических воздействиях на токоприемник со стороны контактной сети подвижная рама 1 через шток 7 воздействует на поршень 8, опуская его вниз. Ферромагнитная жидкость начинает перетекать в расширительный резервуар 13. Датчик 16 скорости перемещения штока 7 посылает сигнал в регулятор 15 тока, который подает напряжение в управляющую обмотку 14 магнитного дросселя. Магнитное поле, создаваемое управляющей обмоткой 14, увеличивает вязкость ферромагнитной жидкости в пространстве, охватываемом управляющей обмоткой 14, и противодействует перетеканию жидкости в распределительный резервуар 13, меняя тем самым коэффициент демпфирования в зависимости от скорости пере.мещения штока 7. При включении управляющей об.мотки 10, а следовательно, движении вверх поршня 8 и штока 7 регулятор 15 тока отключает питание управляющей обмотки 14 и обеспечивает беспрепятственное перетекание ферромагнитной жидкости в подпоршневое пространство 11. Для наиболее полного использования магнитного потока корпус 1 и перепускной канал 12 выполнены из немагнитного материала, а обмотки 10 и 14 заключены в ферромагнитные экраны, по которым замыкаются магнитные силовые линии. Использование в токоприемнике амортизатора позволяет получить желаемую зависимость силы сопротивления амортизатора от скорости перемещения штока, обеспечивая тем самым оптимальный коэффициент вязкого трения токоприемника ,в
широком диапазоне скоростей движения подвижного состава.
Кроме того, амортизатор козволяет увеличивать статическое нажатие токоириемника на контактный провод при высоких скоростях движения, вследствие чего понижается возможность появления отрывов полоза и пережогов контактного провода. При трогании и разгоне электроподвижного состава величина тока, протекающего через токоприемник, возрастает в 2-3 раза в сравнении с номинальным режимом. В это.м случае также необходимо обеспечивать повышенную величину контактного нажатия
для обеспечения
надежного электрического контакта.
Амортизатор не требует разборки при настройке и регулировке, в его конструкции отсутствуют детали, требующие высоко точности изготовления, что снижает затраты на его изготовление и эксплуатацию.
Включенный в систему автоматического регулирования амортизатор обесиечивает оптимальные величины контактпого нажатия и коэффициента демпфирования для каждого конкретного режима, повышая тем самым надежность токосъема и снижая износ контактных пластин и токопровода.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ НАЖАТИЯ ТОКОПРИЕМНИКА | 1991 |
|
RU2023602C1 |
| Токоприемник транспортного средства | 1987 |
|
SU1463544A1 |
| Токоприемник электроподвижного состава | 1984 |
|
SU1234247A1 |
| Токоприемник электроподвижного состава | 1973 |
|
SU448974A1 |
| ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР (ВАРИАНТЫ) | 1997 |
|
RU2118726C1 |
| Токоприемник электроподвижного состава | 1975 |
|
SU543532A1 |
| Токоприемник электроподвижного состава | 2024 |
|
RU2837288C1 |
| Измерительный токоприемник электроподвижного состава | 2018 |
|
RU2681477C1 |
| Токоприемник электроподвижного состава | 1990 |
|
SU1791182A1 |
| Токоприемник электроподвижного состава | 1978 |
|
SU753693A1 |
1. ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА, содержащий подвижную раму, полоз, каретки, подъемные пружины и соединенный с подвижной рамой гидравлический амортизатор, выполненный в виде корпуса с расположенными в нем поршнем и штоком, отличающийся тем, что, с целью повышения надежности, он снабжен регуляторами тока, датчиком скорости перемещения щтока амортизатора, соединенным с входом первого регулятора тока, и распределительным резервуаром, соединенным посредством перепускного канала с подпоршневым пространством, которое заполнено ферромагнитной жидкостью, причем на корпусе амортизатора закреплена управляющая обмотка, соединенная с вторым регулятором тока, а на перепускном канале установлен магнитный дроссель с управляющей обмоткой, соединенной с выходом первого регулятора. 2. Токоприемник по п. I, отличающийся тем, что корпус амортизатора и перепускной канал выполнены немагнитными и снабжены ферромагнитными экранами, охватывающими управляющую обмотку регулятора тока и управляющую обмотку магнитного (П дросселя. со 4i 41 Ю СО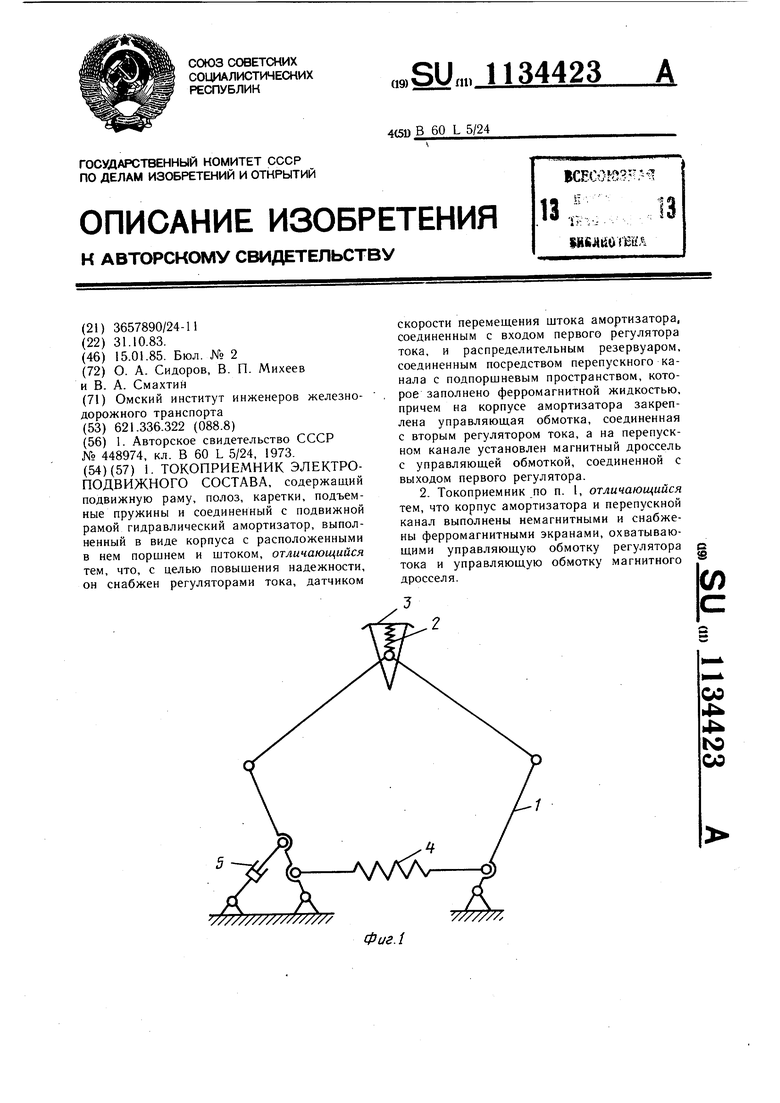
15
.. пчГччС я /г
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Токоприемник электроподвижного состава | 1973 |
|
SU448974A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
