«12
Изобретение относится к мащино- строениго, а именно к захватным устройствам манипуляторов, предназначенным для механизации и автоматизации различных технологических процессов.
Цель изобретения - повышение надежности работ за счет введения механизма фиксации.
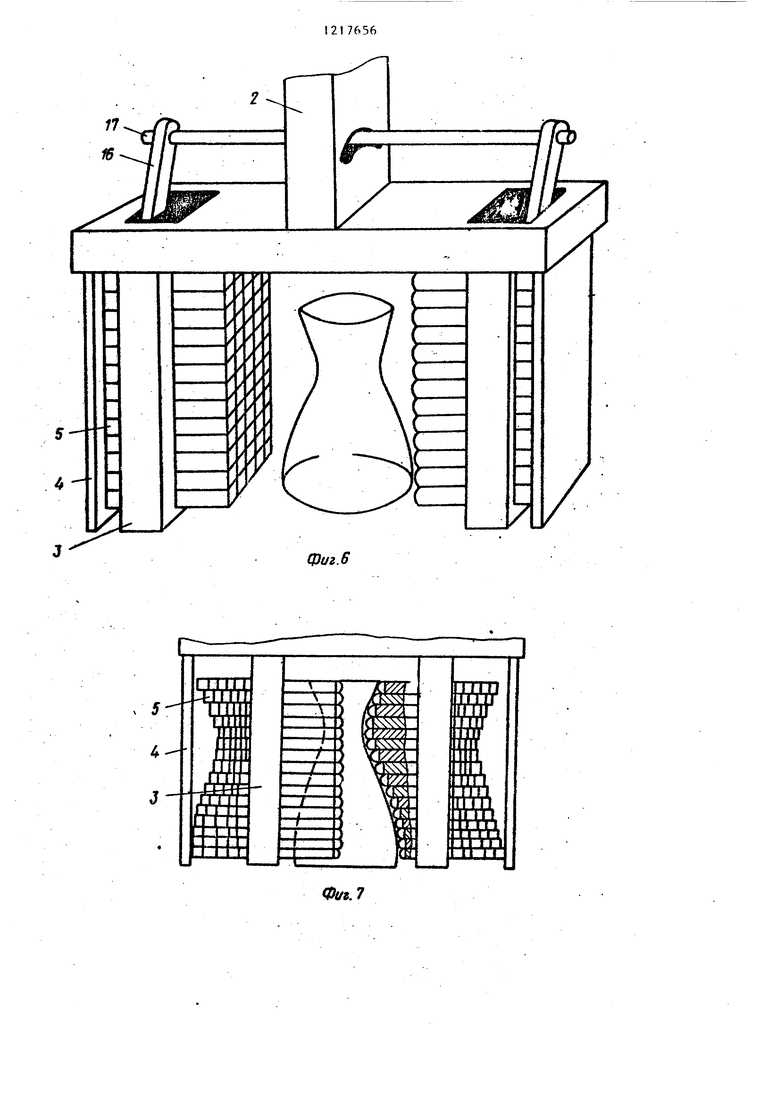
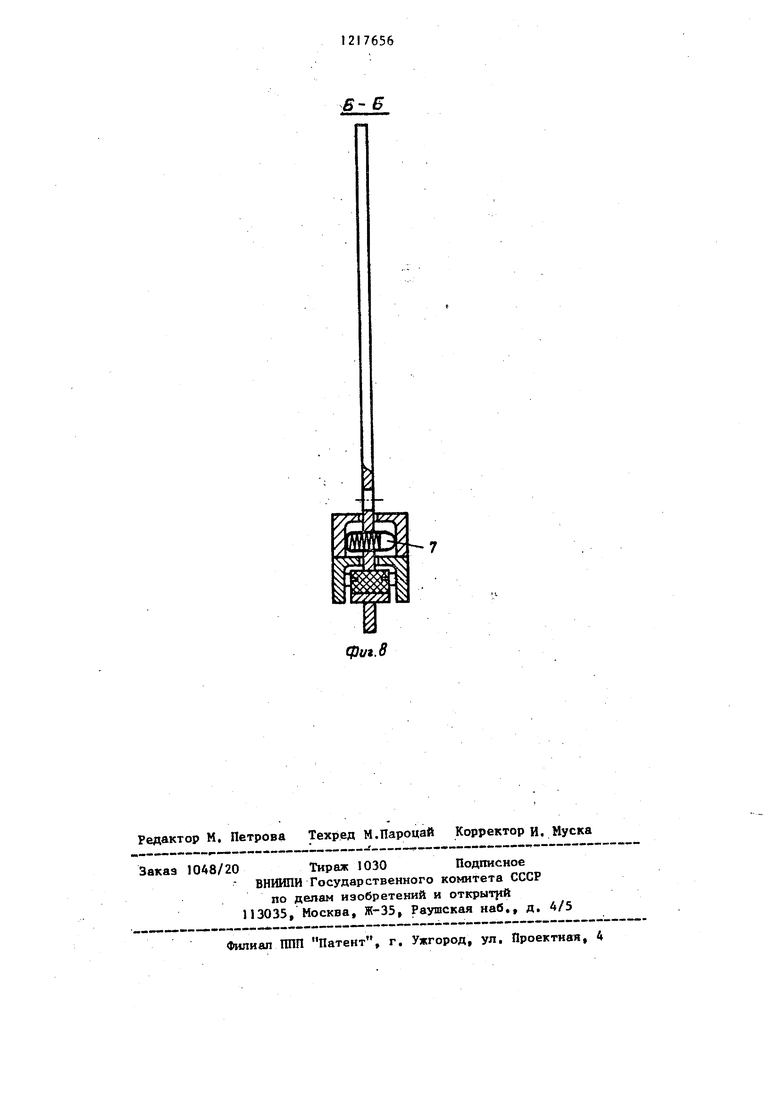
На фиг. 1 изображено предлагаемое захватное устройство, общий вид; на фиг, 2 - разрез А-А на фиг, I; на фиг, 3 - привод сведения захватных элементов; на фиг. 4 - привод механизма фиксации губок; на фиг, 5 - механизм фиксации губок; на фиг, 6 - пример выполнения захвата изделия; на фиг, 7 - схема захвата изделия;
на фиг, 8 - разрез Б-Б на фиг, 5, I
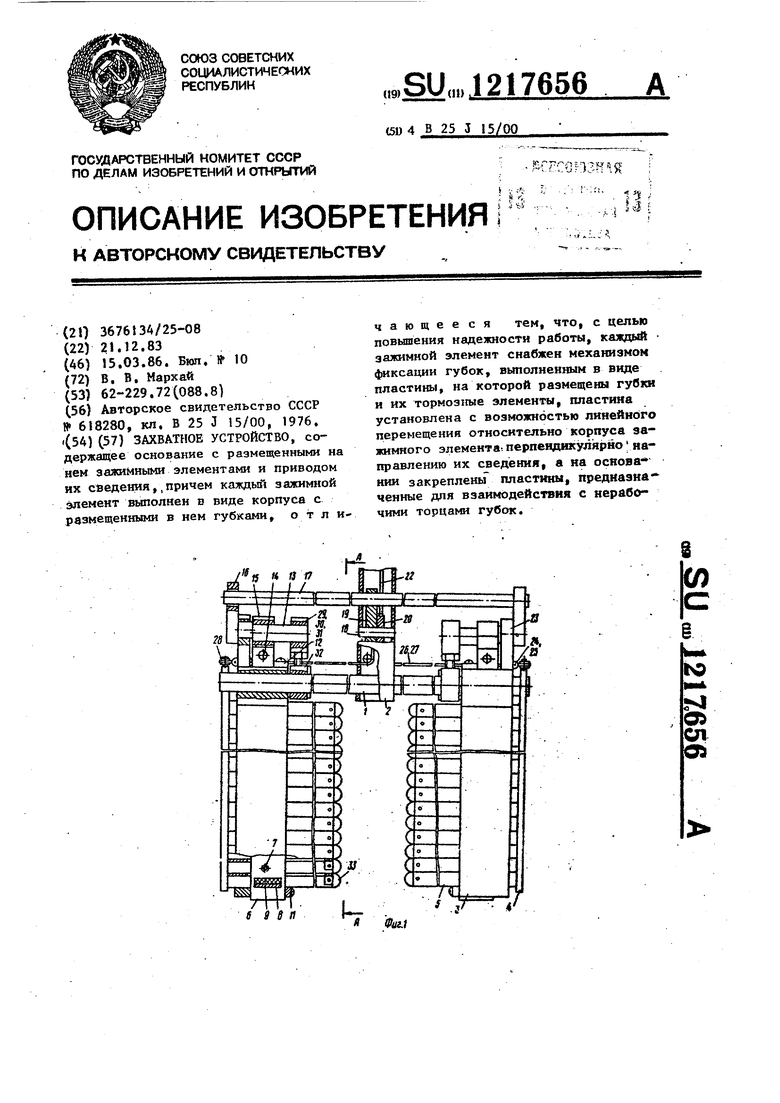
Захватное устройство манипулятора
содержит две направляющие 1, закрепленные в основании 2, Симметрично относительно основания 2 на направ- ляющих 1 установлены с возможностью перемещения по ним два корпуса 3 и жестко закреплены две пластины 4, В прямоугольных отверстиях Kopnycoia установлены губки-стержни 5, в продольные пазы которых встйвпены пластины 6 с пружинящими тормозными эле- ментами 7, пластинами 8 и упругими элементами 9, Все пластины 6 встав- ;лены в соответствующие пазы 10 корпу- ;са 3, закреплены на корпусе планками 11 и 12 и связаны с осью 13 эксцентрикового механизма, расположенного на корпусе 3 посредством стержня 14 и кронштейна 15, В отверстие рукоятк 16 эксцентрикового механизма вставлен 17, закрепленный в ос- . новании 2 на поворачивакмцемся вокруг оси 18 кронштейне 19, связанном с барабаном 20, на котором жестко закреплен .винтом 21 гибкий элемент 22, К кронштейну 23 корпуса 3 посредством тпек Л и 25 крепятся гибкие элементы 26 и 27, связывающие через 28 два корпуса З с приводом. На оси I3 эксцентрикового механизма крепится кронштейн 29 с винтом 30 и упругой прокладкой 31, бинт проходит в отверстие кронштейна 32 и -упирает- ся упругой прокладкой 31 в тело кронштейна 32, На конце каждого стержня 5 закреплен наконечник 33,
Захватное устройство манипулятора работает следующим образом,
В начальном положении оба корпуса 3 смещены к пластинам 4, и зажимные
)6 J
губки-стержни 5, упираясь в пластины 4, образуют своими наконечниками 33 плоскость. При перемещении корпусов 3 со стержнями 5 к изделию, стержни
5, упираясь наконечниками в изделие, перемещаются относительно корпуса 3, Перемещение одного стержня не вызывает смещения другого, поскольку каждый стержень приторможен элементами
7 относительно пластин 6, а следовательно, и относительно корпуса 3 с усилием, npnMepHj в два раза превышающим вес всех стержней 5, надетых на одну пластину 6. Притормаживание
также позволяет удерживать стержни при любом положении захвата. После того, как стержни 5 захватили изделие, пластины 6 перемещаются вверх эксцентриковым механизмом и зажимают
стержни посредством пластин 8 и упругих элементов 9, Из-за некоторой неточности изготовления или прогибов элементов конструкции усилие зажатия каждого столбика стержней 5 может
быть различным, но минимальное из них будет достаточным для предотвращения перемещений стержней, так как эксценз-риковый механизм обеспечивает значительное усилие, причем это усилив не передается на захватываемое изделие. Эксцентриковым механизмом через винт 30 и упругую прогшадку 31 перемещается вверх и кронштейн 32, что позволяет фиксировать и- оба корпуса ,3 относительно направляющих 1, Расстояние между упругой прокладкой 31 и кронштейном 32 регулируется винтом 30.и гайкой 34, Таким образом осуществляется надежный захват изделия, причем усилие воздействия стержней 5 на изделие незначительно и не зависит от усилия фиксации,
Для освобождения изделия производят расфиксацию стержней 5 и корпусов 3 посредством эксцентрикового механизма и перемещают оба корпуса 3 к пластинам 4, При этом стержни 5 выравниваются и захватное устройство может брэть изделие другой формы,
В зависимости от нагрузок, среды, свойств захватываемых изделий стержни Moryt быть выполнены различной формы и из различных материалов. Наконечники, например, могут быть выполйены из упругих материалов для захвата хрупких изделий, соединяться через асбестовые прокладки со стержнями ,при работе с нагретыми изделиями.
1217656
Таким захватом можно брать такжеПрименение захватного устройства
,11лоские изделия, при этом усилие за-попволяет повысить надежность захвахвата будет передаваться приводомта, так как эксцентриковый механизм
перемещения корпуса 3, а эксцентрико-не ослабит фиксацию стержней и корпувый механизм фиксации использоватьсяj сов даже при выходе из строя гибких
не будет.элементов и приводов.
23
17
W

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формовки выводов микросхемы и узел центровки микросхем для этого устройства | 2016 |
|
RU2644020C1 |
| Схват манипулятора | 1978 |
|
SU770787A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Устройство для отделения деталей швейных изделий от пачки | 1972 |
|
SU441226A1 |
| ГРУППОВОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1999 |
|
RU2170698C1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Установка для центробежной биметаллизации втулок | 1984 |
|
SU1260110A1 |
| ФИКСАТОР АППАРАТА ВНЕШНЕЙ ФИКСАЦИИ ОТЛОМКОВ КОСТЕЙ КОНЕЧНОСТЕЙ И/ИЛИ ТАЗА | 2024 |
|
RU2837971C1 |

JJ
J2
/
J/
JZ7,3f
/ /
I/
/
0
ы Ы
k
Э
TJUUtJ
фиг. 2
У
фи(
/4
S f
9 JA ФтЗ
а
п
фиг. 6
. 5
0i/t.7
Редактор К, Петрова Техред М.Пароцай Корректор и. Куска
. - ,- - .... . j . цд L1 тиит випг -f л иг-ии ruinr п и Bjp кг 1ит j Г1 ш, ищи « ai |. -ш JJ I i гщ 1
Заказ 10А8/20 Тираж 1030 Подписное
ВНИИПИ Государственного кою1тета СССР
по делам изобретений и открыт тй 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
Фиг.в
| Захват | 1976 |
|
SU618280A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
