1
Изобретение относится к средствам автоматизации штамповочного производства, а именно к средствам автоматизации загрузки на позицию штамповки заготовки.
Известно манипулирующее устройство для подачи тонколистовых заготовок в рабочую зону, содержащее захватную головку с основной парой губок, одна из которых неподвижна, а другая выполнена в виде щарнирно смонтированного на корпусе захватной головки средней своей частью двуплечего рычага, свободное плечо которого связано с приводом перемещения 1.
Однако такое устройство имеет невысокую производительность в виду провисания и колебаний листовой заготовки при ее перемещении.
Цель изобретения - повышение производительности работы манипулирующего устройства за счет исключения провисания и колебаний листовой заготовки при ее перемещении.
Поставленная цель достигается тем, что захватные губки выполнены в виде пластин, изогнутых по радиусу в плоскости, перпендикулярной к плоскости смыкания губок.
Кроме того захватная головка снабжена дополнительной парой захватных губок, плоскость изгиба которых расположена под углом к плоскости изгиба основной пары захватных губок.
gЗахватная головка может быть снабжена расположенными в плоскости подавае.мой листовой заготовки дополнительными парами захватных губок с чередующимся направлением изгиба пластин.
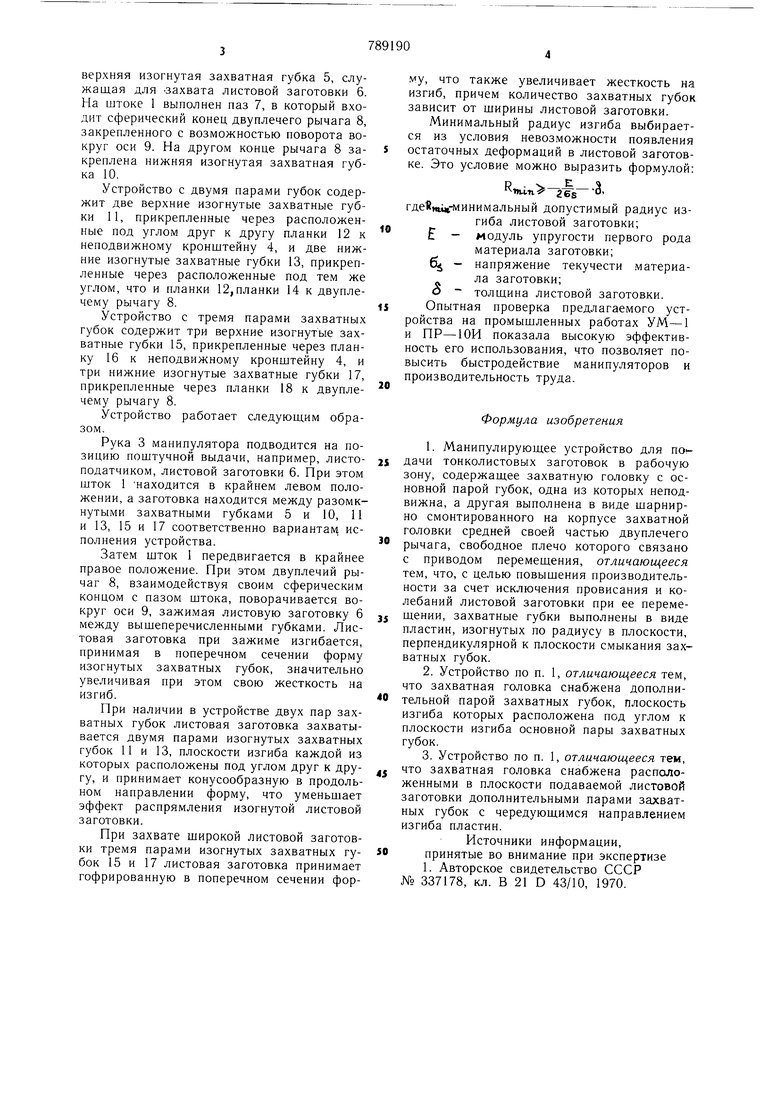
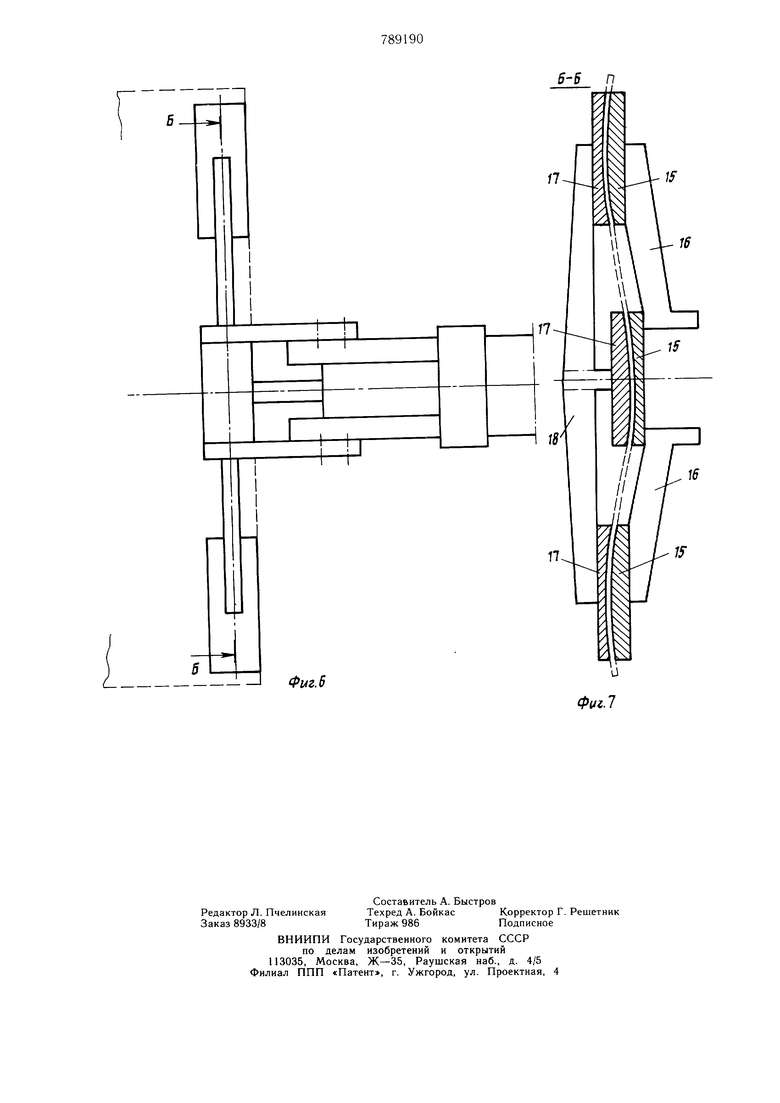
На фиг. 1 показано предлагае.мое устройство с одной парой захватных губок, вид сбоку; на фиг. 2 - то же, вид спереди; на фиг. 3 - то же, вид сверху; на фиг. 4 - устройство с двумя парами захватных губок, вид сверху; на фиг. 5 - сечение на фиг. 4; на фиг. 6 - устройство с тремя захватами губок, вид сверху; на фиг. 7 - сечение Б-Б на фиг. 6.
Устройство с одной парой захватных губок содержит шток 1 совершающий возвратно-поступательные движения от привода (не показан) по направляющим поверхностям захватной головки 2, установленной на руке 3 манипулятора. На корпусе захватной головки 2 закреплен неподвижный кронштейн 4, на конце которого закреплена
верхняя изогнутая захватная губка 5, служащая для -захвата листовой заготовки 6. На штоке 1 выполнен паз 7, в который входит сферический конец двуплечего рычага 8, закрепленного с возможностью поворота вокруг оси 9. На другом конце рычага 8 закреплена нижняя изогнутая захватная губка 10.
Устройство с двумя парами губок содержит две верхние изогнутые захватные губки 11, прикрепленные через расположенные под углом друг к другу планки 12 к неподвижному кронштейну 4, и две нижние изогнутые захватные губки 13, прикрепленные через расположенные под тем же углом, что и планки 12,планки 14 к двуплечему рычагу 8.
Устройство с тремя парами захватных губок содержит три верхние изогнутые захватные губки 15, прикрепленные через планку 16 к неподвижному кронштейну 4, и три нижние изогнутые захватные губки 17, прикрепленные через планки 18 к двуплечему рычагу 8.
Устройство работает следующим образом.
Рука 3 манипулятора подводится на позицию поштучной выдачи, например, листоподатчиком, листовой заготовки 6. При этом щток 1 находится в крайнем левом положении, а заготовка находится между разомкнутыми захватными губками 5 и 10, И и 13, 15 и 17 соответственно вариантал исполнения устройства.
Затем шток 1 передвигается в крайнее правое положение. При этом двуплечий рычаг 8, взаимодействуя своим сферическим концом с пазом штока, поворачивается вокруг оси 9, зажимая листовую заготовку 6 между вышеперечисленными губками. Листовая заготовка при зажиме изгибается, принимая в поперечном сечении форму изогнутых захватных губок, значительно увеличивая при этом свою жесткость на изгиб.
При наличии в устройстве двух пар захватных губок листовая заготовка захватывается двумя парами изогнутых захватных губок 11 и 13, плоскости изгиба каждой из которых расположены под углом друг к другу, и принимает конусообразную в продольном направлении форму, что уменьшает эффект распрямления изогнутой листовой заготовки.
При захвате широкой листовой заготовки тремя парами изогнутых захватных губок 15 и 17 листовая заготовка принимает гофрированную в поперечном сечении форму, что также увеличивает жесткость на изгиб, причем количество захватных губок зависит от ширины листовой заготовки.
Минимальный радиус изгиба выбирается из условия невозможности появления остаточных деформаций в листовой заготовке. Это условие можно выразить формулой:
Rin4.
где11т -минимальный допустимый радиус изгиба листовой заготовки; Е - модуль упругости первого рода
материала заготовки; б - напряжение текучести материала заготовки;
о толщина листовой заготовки. Опытная проверка предлагаемого устройства на промышленных работах УМ-1 и ПР-10И показала высокую эффективность его использования, что позволяет повысить быстродействие манипуляторов и производительность труда.
Формула изобретения
1.Манипулирующее устройство для по дачи тонколистовых заготовок в рабочую
зону, содержащее захватную головку с основной парой губок, одна из которых неподвижна, а другая выполнена в виде щарнирно смонтированного на корпусе захватной головки средней своей частью двуплечего
рычага, свободное плечо которого связано с приводом перемещения, отличающееся тем, что, с целью повышения производительности за счет исключения провисания и колебаний листовой заготовки при ее перемещении, захватные губки выполнены в виде пластин, изогнутых по радиусу в плоскости, перпендикулярной к плоскости смыкания захватных губок.
2.Устройство по п. 1, отличающееся тем, что захватная головка снабжена дополнительной парой захватных губок, плоскость
изгиба которых расположена под углом к плоскости изгиба основной пары захватных губок.
3.Устройство по п. 1, отличающееся тем, что захватная головка снабжена расположенными в плоскости подаваемой листовой заготовки дополнительными парами захватных губок с чередующимся направлением изгиба пластин.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 337178, кл. В 21 D 43/10, 1970.
LA
- h-
Фиг1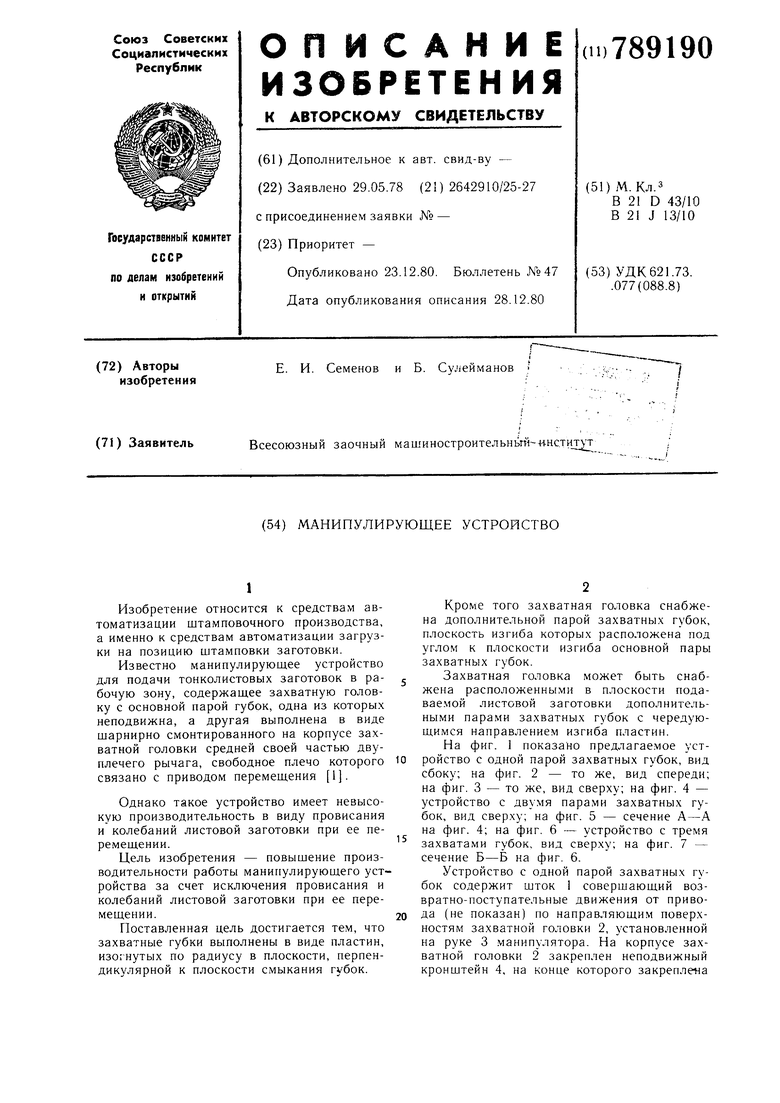
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление к манипулятору для захвата и удаления полых деталей | 1975 |
|
SU527286A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Устройство для ориентации, базирования и подачи листовой заготовки в рабочую зону пресса | 1991 |
|
SU1784376A1 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Устройство для подачи листового материала в зону обработки | 1987 |
|
SU1442301A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1983 |
|
SU1222492A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
I
Фиг,.3
Фиг.
- А повернуто 1 Фиг.б 5-5 n
