оо
Oi
to
00
Изобретение относится к складскому оборудованию, а именно к стеллажам для хранения изделий цилиндрической формы, в частности труб.
Известен склад для хранения цилиндрических изделий, содержащий гравитационный стеллаж с установленными в несколько ярусов одна под другой гравитационными полками с наклоном в смежных ярусах в противоположные стороны, в торцах которых размещено средство для передачи рулонов с верхнего яруса на нижний и устройства для загрузки и разгрузки стеллажа 1.
Однако этот склад требует установки дополнительных приводных механизмов на устройстве для загрузки стеллажа, что требует дополнительных узлов в схеме управления и снижает удобство его эксплуатации.
Известен также склад для хранения цилиндрических изделий, содержащий многоярусный гравитационный стеллаж, на каждом ярусе которого со стороны загрузки смонтирован поворотный грузоприемный механизм, устройства для загрузки и разгрузки стеллажа и подающий конвейер 2.
Недостатком известного склада является сложность конструкции и неудобство его эксплуатации в силу TOfo, что устройство для загрузки представляет собой вертикально расположенный конвейер, склад должен быть снабжен натяжным устройством для конвейера и дополнительными механизмами на конвейере для передачи изделий с конвейера на грузоприемный механизм стеллажа.
Целью изобретения является упрощение конструкции и повыщение удобства эксплуатации.
Цель достигается тем, что в складе для хранения цилиндрических изделий, содержащем многоярусный гравитационный стеллаж, на каждом ярусе которого со стороны загрузки смонтирован поворотный грузоприемный механизм, устройства для загрузки и разгрузки стеллажа и подающий конвейер, поворотный грузоприемный механизм содержит связанные между собой прикрепленной к раме стеллажа горизонтальной осью и подпружиненные друг относительно друга рычаги, а устройство для загрузки стеллажа представляют собой стойку, на которой смонтирована подъемно-опускная каретка с грузонесущей платформой, щарнирно прикрепленной одним концом и под острым углом к раме каретки, причем на конце этой платформы смонтирован ролик для взаимодействия с одним из рычагов грузоприемного механизма.
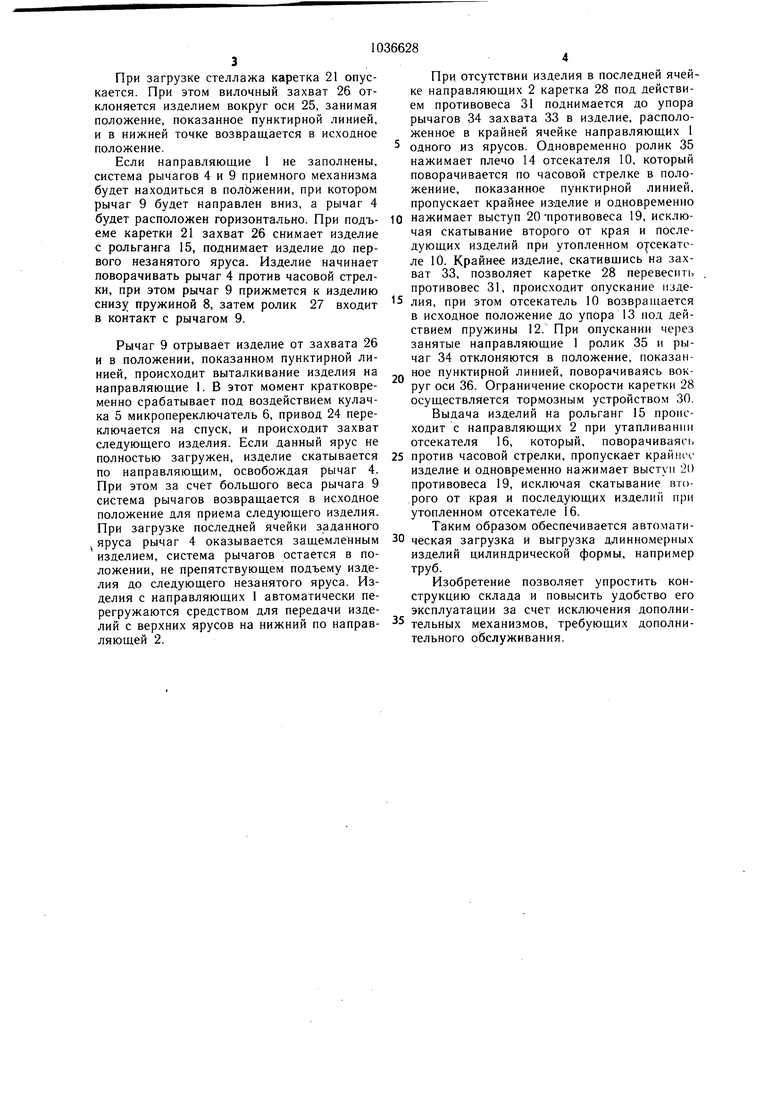
На фиг. 1 показан склад со стороны загрузки, общий вид; на фиг. 2 - грузоприемный механизм яруса, на который в данный момент производится загрузка изделия; на
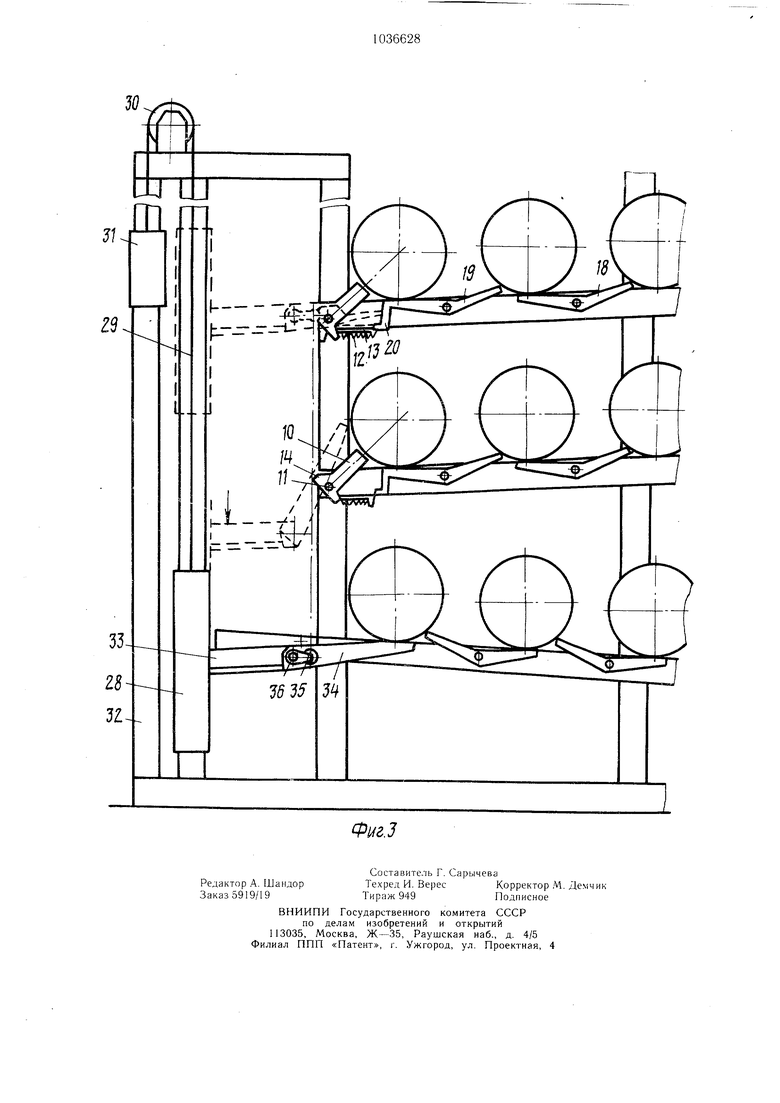
фиг. 3 - склад со стороны разгрузки, общий вид.
Склад содержит гравитационный стеллаж с направляющими I для,грузов и направляющими 2, имеющими наклон в противоположную сторону по отнощению к направляющим 1.
Выще расположенные направляющие 1 снабжены со стороны загрузки грузоприем- ным механизмом, состоящим из установленного на оси 3 рычага 4, имеющего кулачок 5, взаимодействующий в момент закатывания изделия на направляющие с микропереключа телем 6, и паз 7, в котором с ограниченной
5 возможностью перемещения относительно рычага и связанный с ним пружиной 8 на оси 3 установлен рычаг 9. Со стороны выгрузки направляющие 1 снабжены отсекателем 10, выполненным в виде установленного на оси 11 Т-образного рычага, прижатого в рабочем положении пружиной 12 к упору 13 с возможностью взаимодействия плеча 14 с откидным роликом механизма опускания.
Направляющие 2 для выдачи изделий
5 выполнены с наклоном в сторону, противоположную наклону направляющих 1 с возможностью подачи изделий на рольганг 15, и снабжены, отсекателем 16 с приводом 17. Наклонные направляющие 1 и 2 оборудованы эксцентрично закрепленными противовесами 18, предотвращающими столкновение изделий, и противовесами 19, имеющими выступы 20, предотвращающими пропуск последующим изделиям при утопленных отсекателях 10 и 16.
Механизм загрузки стеллажа выполнен в виде подъемно-опускной каретки 21, подвижно установленной на стойке 22, связанной с канатом 23 привода 24 и снабженной установленным на оси 25 вилочным захваQ том 26 с роликом 27, выполненным с возможностью взаимодействия с рычагом 9. Средство для передачи изделий с верхних ярусов на нижний выполнено в виде подъемно-опускной каретки 28, связанной канатом 29 через тормозное устройство 30
5 с противовесом 31, перемещающимся в направляющих 32, снабженной вилочным захватом 33 с ломающимися рычагами 34, обеспечивающими проход каретки вниз и остановку при подъеме у загруженного яруса, и откидным роликом 35, имеющим возможность отклонения вокруг оси, контактирующим с плечом 14 отсекателя 10.
Стеллаж работает следующи.м образом.
Изделия, в частности трубы, перемещаются по технологической линии конвейером (рольгангом) 15, и либо загружаются в стеллаж, либо перемещаются дальще. Разгрузка стеллажа производится на этот же конвейер. При загрузке стеллажа каретка 21 опускается. При этом вилочный захват 26 отклоняется изделием вокруг оси 25, занимая положение, показанное пунктирной линией, и в нижней точке возвращается в исходное положение. Если направляющие 1 не заполнены, система рычагов 4 и 9 приемного механизма будет находиться в положении, при котором рычаг 9 будет направлен вниз, а рычаг 4 будет расположен горизонтально. При подъеме каретки 21 захват 26 снимает изделие с рольганга 15, поднимает изделие до первого незанятого яруса. Изделие начинает поворачивать рычаг 4 против часовой стрелки, при этом рычаг 9 прижмется к изделию снизу пружиной 8, затем ролик 27 входит в контакт с рычагом 9. Рычаг 9 отрывает изделие от захвата 26 и в положении, показанном пунктирной линией, происходит выталкивание изделия на направляющие 1. В этот момент кратковременно срабатывает под воздействием кулачка 5 микропереключатель 6, привод 24 переключается на спуск, и происходит захват следующего изделия. Если данный ярус не полностью загружен, изделие скатывается по направляющим, освобождая рычаг 4. При этом за счет большого веса рычага 9 система рычагов возвращается в исходное положение для приема следующего изделия. При загрузке последней ячейки заданного яруса рычаг 4 оказывается защемленным изделием, система рычагов остается в положении, не препятствующем подъему изделия до следующего незанятого яруса. Изделия с направляющих 1 автоматически перегружаются средством для передачи изделий с верхних ярусов на нижний по направляющей 2. При отсутствии изделия в последней ячейке направляющих 2 каретка 28 под действием противовеса 31 поднимается до упора рычагов 34 захвата 33 в изделие, расположенное в крайней ячейке направляющих 1 одного из ярусов. Одновременно ролик 35 нажимает плечо 14 отсекателя 10, который поворачивается по часовой стрелке в положениие, показанное пунктирной линией, пропускает крайнее изделие и одновременно нажимает выступ 20-противовеса 19, исключая скатывание второго от края и последующих изделий при утопленном о секателе 10. Крайнее изделие, скативщись на захват 33, позволяет каретке 28 перевесить противовес 31, происходит опускание изде- ия, при этом отсекатель 10 возвращается в исходное положение до упора 13 под действием пружины 12. При опускании через занятые направляющие 1 ролик 35 и рычаг 34 отклоняются в положение, показанное пунктирной линией, поворачиваясь вокруг оси 36. Ограничение скорости каретки 28 осуществляется тормозным устройством 30. Выдача изделий на рольганг 15 происходит с направляющих 2 при утапливании отсекателя 16, который, поворачиваясь против часовой стрелки, пропускает крайнее изделие и одновременно нажимает выступ 21) противовеса 19, исключая скатывание второго от края и последующих изделий при утопленном отсекателе 16. Таким образом обеспечивается автоматическая загрузка и выгрузка длинномерных изделий цилиндрической формы, например труб. Изобретение позволяет упростить конструкцию склада и повысить удобство его эксплуатации за счет исключения дополнительных механизмов, требующих дополнительного обслуживания.
Фиг.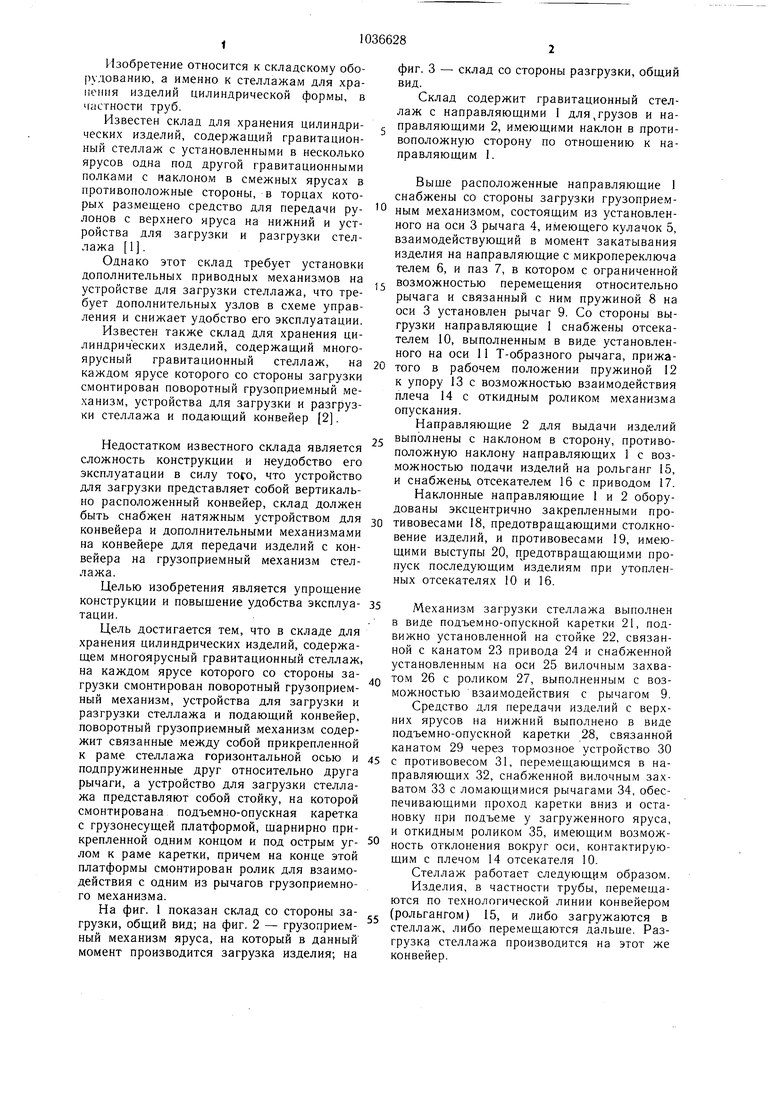
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Склад для хранения штучных грузов | 1974 |
|
SU628038A1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Устройство для загрузки штучных грузов в этажерки подвесного конвейера | 1987 |
|
SU1502444A1 |
| Механизированный склад для штучныхгРузОВ | 1979 |
|
SU850518A1 |
| Устройство для азгрузки стеллажей штучными грузами и разгрузки их | 1974 |
|
SU547376A1 |
| Устройство для накопления цилиндрических изделий | 1986 |
|
SU1361063A1 |
| Склад для штучных грузов | 1972 |
|
SU501939A1 |
| Автоматизированный склад для хранения пакетированных грузов | 1973 |
|
SU591360A1 |
| Устройство для штабелирования и извлечения изделий из штабеля | 1988 |
|
SU1557032A1 |
СКЛАД ДЛЯ ХРАНЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИИ, содержащий многоярусный гравитационный стеллаж, на каждом ярусе которсгго со стороны загрузки смонтирован поворотный грузоприемный механизм, устройства для загрузки и разгрузки стеллажа и подающий конвейер, отличающийся тем, что, с целью упрощения конструкции и удобства эксплуатации, поворотный грузоприемный механизм со.аержит связанные между собой прикрепленной к раме стеллажа горизонтальной осью и подпружиненные друг относительно друга рычаги, а устройство для загрузки стеллажа представляет собой стойку, на которой смонтироана подъемно-опускная каретка с грузонесущей платформой, шарнирно прикрепленной одним концом и под острым углом к раме каретки, причем на конце этой платформы смонтирован ролик для взаимодействия с одним из рычагов грузоприемного ме.ханизма.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Склад для хранения и выдачи изделий цилиндрической формы | 1975 |
|
SU600040A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ГРАВИТАЦИОННЫЙ МНОГОЯРУСНЫЙ СТЕЛЛАЖ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 0 |
|
SU366126A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
