Изобретение относится к радиолокационной технике и может быть использовано в когерентных импульсных РЛС высокой скважности, осуществляющих сопровождение целей, скорости которых изменяются в широком диапазоне.
Известно, что в когерентных импульсных РЛС одним из направлений устранения слепых скоростей является изменение частоты повторения зондирующих сигналов.
Известен способ, по которому установка частоты повторения ведется после анализа частотного спектра доплеровского отраженного сигнала. Примером реализации такого способа, выбранного за прототип, является устройство [1] в котором частота формируемого в РЛС доплеровского сигнала сравнивается с пороговой частотой и частота повторения изменяется, когда указанная частота становится меньше или равной пороговой.
Недостатком этого способа является широкий частотный спектр доплеровского отраженного сигнала, что обусловливает применение широкополосных фильтров этого сигнала в каналах сопровождения РЛС. Указанный недостаток обусловлен отсутствием информации о реальной (или близкой к ней) доплеровской частоте эхо-сигналов целей.
Целью изобретения является повышение точности сопровождения за счет улучшения отношения сигнал/шум, обеспечиваемого сужением диапазона частотного спектра доплеровского отраженного сигнала, формируемого в РЛС по эхо-сигналам сопровождаемой цели.
В РЛС сопровождения можно определить доплеровскую частоту эхо-сигналов сопровождения цели, используя известное соотношение
Fg=  (1)
(1)
Скорость Vr в выражении (1) может быть найдена по изменению дальности, измеренной следящим дальномером [2]
Однако при высоких (миллиметровый диапазон) несущих частотах РЛС использование скорости, измеренной по данным дальномера, может не обеспечить желаемого эффекта.
Предлагается уточнить измеренную по данным дальномера скорость и соответствующую доплеровскую частоту по формируемому в РЛС реальному доплеровскому отраженному сигналу, а эти уточненные данные использовать для установки такой частоты повторения, при которой формируемая в РЛС реальная частота Fмод доплеровского отраженного сигнала будет близка к центральной частоте Fмодо задаваемой полосы частот формируемого в РЛС частотного спектра доплеровского отраженного сигнала. За счет этого может быть обеспечено необходимое улучшение отношения сигнал/шум, а следовательно, и точность сопровождения цели.
При способе, заключающемся в изменении частоты повторения зондирующих импульсов РЛС после анализа частотного спектра доплеровского отраженного сигнала, предлагается вычислять и формировать модифицированную доплеровскую частоту как разность между доплеровской частотой, определяемой по скорости изменения измеренной дальности, и центральной частотой задаваемой полосы частот частотного спектра формируемого в РЛС доплеровского отраженного сигнала, при установленной в РЛС частоте повторения формировать сигнал реальной частоты доплеровского отраженного сигнала сопровождаемой цели, сравнивать частоту этого сигнала с центральной и граничными частотами задаваемой полосы частот и при уходе реальной частоты доплеровского отраженного сигнала за пределы этой полосы результат сравнения (разность значений) реальной и указанной центральной частот алгебраически суммировать с текущей модифицированной доплеровской частотой, а при попадании ее в заданную полосу формировать накапливающуюся сумму получаемой разности частот с зафиксированной по данной ситуации (попадание в полосу) модифицированной доплеровской частотой, при этом общий результат суммирования частот используют для управления частотой повторения зондирующих импульсов РЛС, в частности в одном случае частоту повторения зондирующих импульсов РЛС можно определять делением общего результата суммирования частот на n 2, 3 до значения, не превышающего заданную минимальную частоту повторения зондирующих импульсов РЛС, в другом период следования зондирующих импульсов РЛС можно определять суммированием с самой собой величины, обратной общему результату суммирования частот n 2, 3 раз до значения, превысившего установленный минимальный период следования зондирующих импульсов.
Основной задачей при осуществлении предлагаемого способа является установка такой текущей частоты повторения импульсов РЛС, чтобы при любой(из заданного диапазона) скорости сопровождаемой цели по ее эхо-сигналам в РЛС формировалось напряжение частоты доплеровского отраженного сигнала Fмод, не выходящее за пределы установленной заранее полосы частот этого сигнала. Причем чем меньше будет изменяться формируемая в РЛС частота Fмод, т.е. чем уже может быть установлена полоса частот, тем больше обеспечится выигрыш в отношении сигнал/шум, тем выше будет точность сопровождения целей.
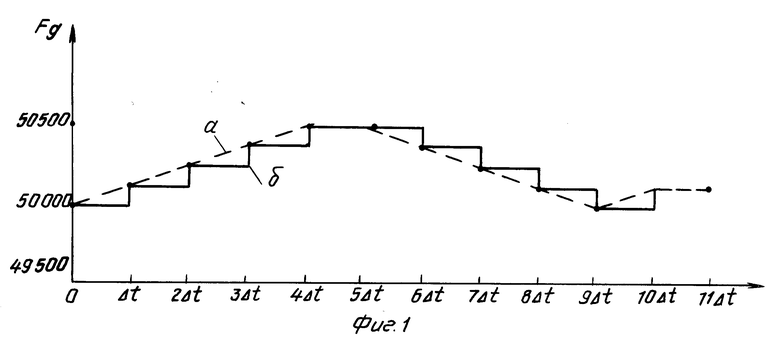
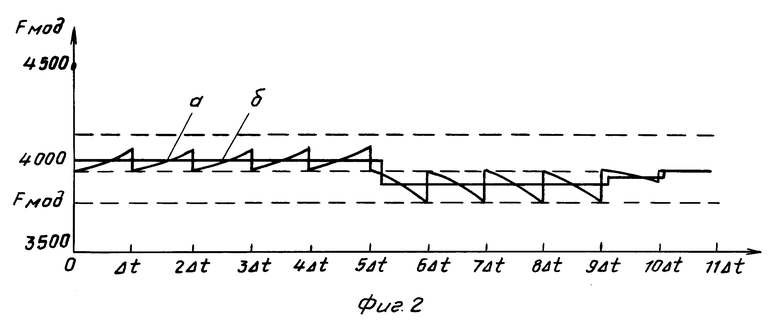
На фиг. 1 представлена диаграмма изменения доплеровской частоты, где а реальная доплеровская частота Fдреал; б вычисленная доплеровская частота Fд; на фиг. 2 представлена диаграмма изменения частоты формируемого в РЛС доплеровского отраженного сигнала, где а реальная частота формируемого в РЛС доплеровского отраженного сигнала Fмод; б разность реальной частоты формируемого в РЛС доплеровского отраженного сигнала и установленной (центральной) частоты задаваемой полосы частот формируемого в РЛС спектра доплеровского отраженного сигнала Fмодо ΔFмод Fмод Fмодо;
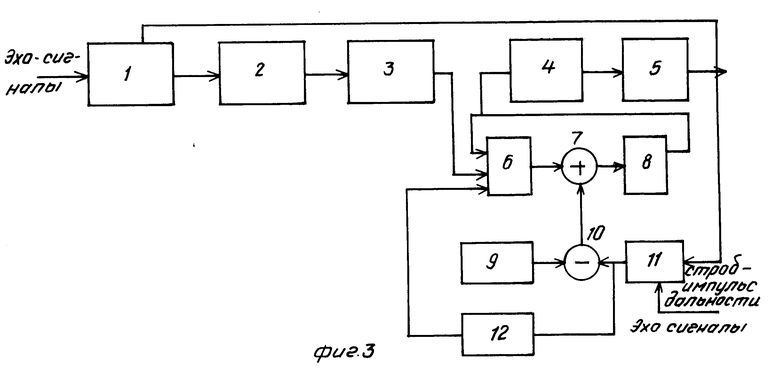
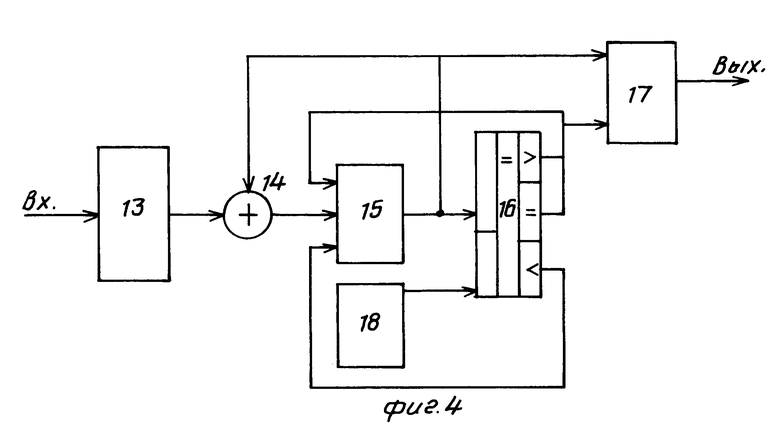
На фиг. 3 представлена обобщенная структурная схема устройства для осуществления предлагаемого способа, где 1 следящий измеритель дальности; 2 измеритель скорости; 3 вычислитель модифицированной доплеровской частоты по измеренной скорости F*драсч; 4 вычислитель кода периода повторения зондирующих импульсов РЛС; 5 синтезатор частоты повторения зондирующих сигналов; 6 мультиплексор; 7 сумматор 8 регистр; 9 датчик устанавливаемой центральной частоты полосы формируемого в РЛС спектра доплеровского отраженного сигнала; 10 вычитающее устройство; 11 формирователь реальной частоты формируемого в РЛС доплеровского отраженного сигнала Fмод; 12 анализатор заданной полосы частот формируемого в РЛС доплеровского отраженного сигнала; на фиг. 4 представлена структурная схема вычислителя кода периода повторения зондирующих импульсов РЛС, где 13 вычислитель периода вычисленной частоты Fд; 14 сумматор; 15, 17 регистр; 16 схема сравнения; 18 блок памяти.
Сущность предлагаемого изобретения заключается в следующем.
Частота повторения зондирующих сигналов РЛС может быть выражена через доплеровскую частоту Fд, обусловленную скоростью движения цели, и частоту формируемого в РЛС доплеровского отраженного сигнала Fмодизвестным выражением:
Fn=  (2)
(2)
Предлагается, используя зависимость (1), определить доплеровскую частоту  по скорости изменения измеренной дальности
по скорости изменения измеренной дальности  сопровождаемой цели
сопровождаемой цели =
=  (3)
(3)
По вычисленной по выражению (3) доплеровской частоте  предлагается устанавливать частоту повторения зондирующих сигналов такой, чтобы частота формируемого в РЛС доплеровского отраженного сигнала Fмод была равна центральной частоте заданной полосы частот Fмодо, т.е.
предлагается устанавливать частоту повторения зондирующих сигналов такой, чтобы частота формируемого в РЛС доплеровского отраженного сигнала Fмод была равна центральной частоте заданной полосы частот Fмодо, т.е.
Fn=  (4)
(4)
Фактически из-за ошибок определения скорости сопровождаемой цели по измеренной дальномером дальности частота  Fд и при установленной по выражению (4) частоте повторения Fп зондирующих сигналов частота Fмодбудет отличаться от Fмодо, т.е. будет иметь место разность
Fд и при установленной по выражению (4) частоте повторения Fп зондирующих сигналов частота Fмодбудет отличаться от Fмодо, т.е. будет иметь место разность
ΔFмод Fмод Fмодо (5)
Чтобы в РЛС был сформирован доплеровский отраженный сигнал с частотой Fмодо необходимо устанавливать частоту повторения по модифицированной реальной доплеровской частоте
Fдреал* Fд Fмодо (6)
Так как в соответствии с формулами (2), (4) и (5) реальная доплеровская частота Fдреал=  + ΔFмод, то в соответствии с выражением (6) для установки частоты повторения зондирующих сигналов в РЛС, при которой при любой скорости цели частота Fмод была бы близка к Fмодо, необходимо вычислить модифицированную доплеровскую частоту F
+ ΔFмод, то в соответствии с выражением (6) для установки частоты повторения зондирующих сигналов в РЛС, при которой при любой скорости цели частота Fмод была бы близка к Fмодо, необходимо вычислить модифицированную доплеровскую частоту F + Fмод
+ Fмод и сложить ее с текущей разностью ΔFмод между реальной Fмод и заданной центральной Fмодо, т. е.
и сложить ее с текущей разностью ΔFмод между реальной Fмод и заданной центральной Fмодо, т. е.
Fn=  (7)
(7)
Однако из-за флюктуаций вычисленной доплеровской частоты  , обусловленных флюктуационной составляющей ошибки дальномера, частота доплеровского отраженного сигнала Fмод также будет флюктуировать относительно значения Fдмод Fмодо. Эти флюктуации можно уменьшить, если модифицированную доплеровскую частоту Fдрасч*, вычисленную по изменению дальности, использовать только на начальном этапе установки частоты повторения до тех пор, пока формируемая в РЛС частота Fмод не попадет в заданную полосу частот, определяемую анализатором 12, а затем, запомнив значение F*дреал, удовлетворившее этому условию, дальнейшее суммирование ΔFмод приводить только с этим запомненным значением Fдрасч.* и полученную сумму использовать для формирования Fn. При этом при неизменяющейся скорости цели в РЛС будет формироваться Fмод ≈ Fмодо, а значит ΔFмод ≈ 0 и в РЛС будет установлена неизменяющаяся частота повторения.
, обусловленных флюктуационной составляющей ошибки дальномера, частота доплеровского отраженного сигнала Fмод также будет флюктуировать относительно значения Fдмод Fмодо. Эти флюктуации можно уменьшить, если модифицированную доплеровскую частоту Fдрасч*, вычисленную по изменению дальности, использовать только на начальном этапе установки частоты повторения до тех пор, пока формируемая в РЛС частота Fмод не попадет в заданную полосу частот, определяемую анализатором 12, а затем, запомнив значение F*дреал, удовлетворившее этому условию, дальнейшее суммирование ΔFмод приводить только с этим запомненным значением Fдрасч.* и полученную сумму использовать для формирования Fn. При этом при неизменяющейся скорости цели в РЛС будет формироваться Fмод ≈ Fмодо, а значит ΔFмод ≈ 0 и в РЛС будет установлена неизменяющаяся частота повторения.
Исключение из процесса формирования модифицированной доплеровской частоты Fдреал* текущей Fдрасч.* устраняет влияние ошибок дальномера на управление частотой повторения зондирующих импульсов РЛС.
Если цель движется с ускорением, то формируемая частота доплеровского отраженного сигнала Fмод будет отличаться от Fмодо, появится ΔFмод ≠ 0. Просуммировав ее с предыдущим (запомненным) значением модифицированной реальной доплеровской частоты Fдреал*, получаем ее новое, соответствующее новой скорости, значение. По уточненной частоте сформируется новая частота повторения Fn, при которой снова Fмод Fмодо. Уточненная Fдреал* запомнится и будет использована в качестве слагаемого с новым значением ΔFмод, обусловленным изменением скорости цели. В этом случае также ошибки дальномера не будут влиять на точность установки.
Изменение частоты повторения по предлагаемому способу производят дискретно. Это обусловлено необходимостью квантования измеренной дальности для оценки ее изменения, а также физикой формирования Fмод частота Fмод формируется обычно с использованием фильтров частоты доплеровского отраженного сигнала, задержка τ3 в выдаче сигнала определяется величиной
τ3= 3/Δf, где Δf полоса пропускания фильтра
Запаздывание в формировании данных для установки частоты повторения Fn может привести к тому, что Fмод выйдет за пределы установленного узкого диапазона частот доплеровского отраженного сигнала. Это нужно учитывать при выборе задаваемой полосы частот доплеровского отраженного сигнала.
На фиг. 3 приведен пример устройства, реализующего предлагаемый способ. Устройство обеспечивает цифровую обработку сигнала и содержит последовательно соединенные следящий измеритель 1 дальности, блок 2 измерения скорости по изменению измеренной дальности и вычислитель 3 модифицированной доплеровской частоты по измеренной скорости, вычислитель 4 кода периода повторения зондирующих импульсов РЛС и синтезатор 5 частоты повторения зондирующих сигналов, а также два канала вычисления модифицированной реальной доплеровской частоты Fдреал, где первый канал состоит из первого сигнального входа мультиплексора 6, сумматора 7, регистра 8, второй канал состоит из второго сигнального входа мультиплексора 6 и того же сумматора 7, регистра 8, датчик 9 устанавливаемой центральной частоты Fмодо формируемого в РЛС спектре доплеровского отраженного сигнала, вычитающее устройство 10, формирователь 11 реальной частоты доплеровского отраженного сигнала Fмоди анализатор 12 заданной полосы частот формируемого в РЛС доплеровского отраженного сигнала, формирующий команду для переключения каналов вычисления частоты Fдреал.
Процесс формирования данных для установки частоты повторения по предлагаемому способу протекает следующим образом. По эхо-сигналам сопровождаемой цели следящий дальномер 1 непрерывно измеряет координату ее дальности. Данные об этой координате (обычно в цифровом виде) поступают на блок 2 измерения скорости, оценивающий скорость движения цели, например по методу дифференцирования измеренной дальности. Данные об измеренной скорости в цифровом виде поступают в вычислитель 3
F - F
- F , где
, где  =
= 
 - измеренная скорость цели;
- измеренная скорость цели;
λ длина волны зондирующего сигнала РЛС.
Вычислитель 3, реализующий функцию (1), может физически отсутствовать, если эту операцию выполняет ЭВМ РЛС. Он может быть выполнен также и в виде самостоятельного устройства, например в виде ПЗУ, на адресные входы которого подаются полученные коды скорости  из блока 2, а в соответствующие этим адресам ячейки ПЗУ при прожиге ПЗУ записываются данные, представляющие вычисленные по формуле (1) значения частоты Fдрасч.*. В сумматоре 7 Fдрасч.* с выхода вычислителя 3 суммируется с ΔFмод, формируемой как разность значений частоты Fмод, формируемой известными методами в формирователе 11, и заданной центральной частоты Fмодо, хранящейся в датчике 9 (это может быть регистр или ПЗУ). Полученная сумма, представляющая код частоты Fдреал, записывается в регистре 8, откуда поступает на второй сигнальный вход мультиплексора 6 и на вычислитель 4. Вычислитель 4 и синтезатор 5 реализуют операцию установки требуемой частоты повторения. Так как рассматривается реализация предлагаемого способа средствами цифровой техники, то для упрощения вычисления операция деления частоты с выхода регистра 8 заменяется суммированием периодов этой частоты n 2, 3, При этом в элементе 13 (см. фиг. 4) вычисляют период Тдреал* 1/Fреал*. Элемент 13 может представлять собой ПЗУ, на адресные входы которого поступают данные о частоте Fдреал* из регистра 8, а в ячейки данных ПЗУ с адресами, соответствующими отдельным значениям этой частоты Fдреалi*, записаны значения Тдреалi*. Считанные из элемента 13 значения Тдреалi* суммируются последовательно с самими собой (сумматор 14, регистр 15) до тех пор, пока полученная сумма не достигнет (или немного превысит) записанное в блок 18 значение минимального периода Тnmin следования зондирующих сигналов РЛС. Сравнение получаемой суммы Тдреал и Tnmin осуществляется схемой сравнения 16. При выполнении требуемого условия схема 16 формирует сигнал, по которому полученная сумма Т2 nTдреал* (n 2, 3,) записывается в регистр 17, где формируются импульсы, следующие с частотой Fn=
из блока 2, а в соответствующие этим адресам ячейки ПЗУ при прожиге ПЗУ записываются данные, представляющие вычисленные по формуле (1) значения частоты Fдрасч.*. В сумматоре 7 Fдрасч.* с выхода вычислителя 3 суммируется с ΔFмод, формируемой как разность значений частоты Fмод, формируемой известными методами в формирователе 11, и заданной центральной частоты Fмодо, хранящейся в датчике 9 (это может быть регистр или ПЗУ). Полученная сумма, представляющая код частоты Fдреал, записывается в регистре 8, откуда поступает на второй сигнальный вход мультиплексора 6 и на вычислитель 4. Вычислитель 4 и синтезатор 5 реализуют операцию установки требуемой частоты повторения. Так как рассматривается реализация предлагаемого способа средствами цифровой техники, то для упрощения вычисления операция деления частоты с выхода регистра 8 заменяется суммированием периодов этой частоты n 2, 3, При этом в элементе 13 (см. фиг. 4) вычисляют период Тдреал* 1/Fреал*. Элемент 13 может представлять собой ПЗУ, на адресные входы которого поступают данные о частоте Fдреал* из регистра 8, а в ячейки данных ПЗУ с адресами, соответствующими отдельным значениям этой частоты Fдреалi*, записаны значения Тдреалi*. Считанные из элемента 13 значения Тдреалi* суммируются последовательно с самими собой (сумматор 14, регистр 15) до тех пор, пока полученная сумма не достигнет (или немного превысит) записанное в блок 18 значение минимального периода Тnmin следования зондирующих сигналов РЛС. Сравнение получаемой суммы Тдреал и Tnmin осуществляется схемой сравнения 16. При выполнении требуемого условия схема 16 формирует сигнал, по которому полученная сумма Т2 nTдреал* (n 2, 3,) записывается в регистр 17, где формируются импульсы, следующие с частотой Fn= 
 которые используются для запуска передатчика РЛС.
которые используются для запуска передатчика РЛС.
Так происходит работа рассматриваемого устройства до тех пор, пока частота Fмод формируемого в формирователе 11 сигнала находится вне полосы пропускания анализатора 12. При попадании ее в эту полосу на выходе анализатора 12 появляется сигнал, который переключает мультиплексор 6, в результате чего формируемая в устройстве 10 разностная частота ΔFмод суммируется в сумматоре 7 с заполненным в регистре 8 значением Fдреал, обусловившим указанную ситуацию. В дальнейшем процесс идет по рассмотренному алгоритму.
Процесс управления частотой повторения по предлагаемому способу будет более понятен из рассмотрения конкретного числового примера.
Пусть РЛС работает с λ= 8 мм, для нее установлен диапазон частот повторения Fn (8000 10000)Гц, Fмодо 4000 Гц, задаваемый диапазон частот доплеровского отраженного сигнала составляет (3800-4200) Гц.
Пусть сопровождаемая цель движется с постоянной скоростью Vo 200 м/с. Пусть следящий дальномер 1 позволяет оценить скорость по изменению измеренной дальности с ошибкой ΔV ±5 м. Пусть измеренная в устройстве 3 скорость  205 м/с. При λ= 8 мм вычисленная доплеровская частота
205 м/с. При λ= 8 мм вычисленная доплеровская частота  будет равна
будет равна =
= 
 51250 Гц Вычисленная в устройстве 3 модифицированная доплеровская частота при этом будет равна
51250 Гц Вычисленная в устройстве 3 модифицированная доплеровская частота при этом будет равна расч.=
расч.=  F
F = 51250 4000 47250 Гц
= 51250 4000 47250 Гц
Последовательное суммирование периодов этой частоты n 5 раз дает Fn1 9450 Гц.
По условиям примера истинная скорость цели V 200 м/с, а соответствующая ей доплеровская частота Fд 50000 Гц. При частоте повторения Fn 9450 Гц по эхо-сигналам цели с Fд 50000 Гц, будет сформирована частота доплеровского отраженного сигнала
Fмод1 Fд nFn1 2750 Гц
Эта частота доплеровского отраженного сигнала находится вне полосы 3800 4200. Поэтому полученная на выходе вычитающего устройства 10 разность
ΔFмод1 Fмод1 Fмодо 1250 Гц будет просуммирована с Fдрасч1*. Получаем
Fд1* Fдрасч1* + ΔFмод1 46000 Гц
По этой Fд* будет установлена частота повторения
F =
= 
 9200 Гц при которой по реальной доплеровской частоте Fд 50000 Гц будет сформирована
9200 Гц при которой по реальной доплеровской частоте Fд 50000 Гц будет сформирована
Fмод2 Fд nFn2 50000 46000 4000 Гц
Этот факт подтверждает указанное утверждение, что при любой Fдрасчприменение данного способа позволяет установить Fn, при которой Fмодi= Fмодо.
Сформированная частота доплеровского отраженного сигнала Fмод2 Fмодо 4000 Гц находится в диапазоне заданной для частот доплеровского отраженного сигнала полосе Δf 3800-4200 Гц. Поэтому разность
ΔFмод2 Fмод2 Fмодо 0 будет суммироваться с F*д1, а не с Fдрасч2*, которое из-за ошибок дальномера может существенно отличаться от Fд1*.
В результате на данном шаге рассматриваемого процесса в РЛС будет сформирована
Fд2* Fд1* + ΔFмод2 46000 + 0 46000 Гц и частота повторения Fn3 Fn2.
По предположению скорость цели не изменялась. Поэтому снова будет сформирована ΔFмод3 0 и установленная в РЛС частота повторения Fn не будет изменяться. При ускорении цели ситуация изменяется, разность ΔFмод не будет равной нулю, что приведет к соответствующему изменению частоты повторения.
В таблице приведены количественные значения параметров и данных при применении данного способа для управления частотой повторения зондирующих импульсов РЛС при движении цели с постоянным ускорением а 25 м/c2, при Vo 200 м/с, затем движение с постоянной скоростью V 202 м/с, торможение с ускорением а -30 м/с и выход на скорость V 200 м/с.
Из фиг. 1 и 2, отображающих соответственно данные таблицы для реальной и вычисляемой с учетом Fмод доплеровской частоты, а также данные для реальной частоты доплеровского отраженного сигнала Fмод, видно, что предлагаемый способ обеспечивает хорошую точность отслеживания Fn за изменениями доплеровской частоты, обусловленной вариациями скорости сопровождаемой цели. При этом вычисленная доплеровская частота (см. фиг. 1, ломаная линия б) соответствует реальной (линия а) только в моменты смены данных, а формируемая частота доплеровского отраженного сигнала Fмод (см. фиг. 2, линия а) полностью соответствует реальному закону изменения доплеровской частоты (сравним линии а на фиг. 1 и 2) и отличается максимально от установленного для нее значения Fмодо4000 Гц также в моменты смены данных (фиг. 2, линии а и б).
Из фиг. 2 видно, что предлагаемый способ обеспечивает установку такой частоты повторения Fn, что при любой скорости цели формируемая в РЛС частота доплеровского отраженного сигнала Fмод (фиг. 2, линия 2) не выходит за пределы установленного (зона, ограниченная пунктирными линиями на фиг. 2) диапазона частот доплеровского отраженного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ЦЕЛИ ПО СКОРОСТИ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314552C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛЕЙ | 1988 |
|
RU2144202C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С ВЫСОКОЙ ЧАСТОТОЙ ПОВТОРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2713380C1 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ НА БОЛЬШИХ ДАЛЬНОСТЯХ | 2015 |
|
RU2577845C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
| СПОСОБ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2574079C1 |
| Способ измерения дальности и радиальной скорости в РЛС с зондирующим составным псевдослучайным ЛЧМ импульсом | 2017 |
|
RU2688921C2 |
Использование: радиолокационная техника, когерентные импульсные радиолокационные станции (РЛС) высокой скважности, осуществляющие сопровождение целей, скорости которых изменяются в широком диапазоне. Сущность изобретения: повышение точности сопровождения за счет улучшения отношения сигнал/шум, обеспечиваемого сужением диапазона частотного спектра доплеровского отраженного сигнала, формируемого в РЛС по эхо - сигналам сопровождаемой цепи. Это достигается тем, что формируют модифицированную доплеровскую частоту как разность между определенным по данным автодальномера значениям доплеровской частоты сопровождаемой цели и центральной частотой задаваемой полосы частот формируемого в РЛС спектра доплеровского отраженного сигнала, сравнивают частоту формируемого в РЛС сигнала сопровождаемой цели с центральной и граничными частотами задаваемой полосы частот. Если частота сравниваемого сигнала находится вне заданной полосы, результат сравнения как разность частоты формируемого доплеровского отраженного сигнала и центральной частоты заданной полосы частот алгебраически суммируют с текущей модифицированной доплеровской частотой до вхождения частоты доплеровского отраженного сигнала в заданную полосу, после чего запоминают соответствующий этой ситуации результат суммирования и используют его в качестве слагаемого при суммировании с указанной разностью частот, при этом общий результат суммирования частот используют для управления частотой повторения зондирующих импульсов РЛС. 2 з.п.ф-лы. 4 ил., 1 табл.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для испытаний оболочки с отверстием | 1987 |
|
SU1408289A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
