Изобретение относится к области машиностроения, в частности к автоматизации технологических процессов, и может быть использовано для механизированной подачи заготовок в рабочую машину, преимущественно пресс.
Известны манипуляторы, содержащие руку (укладчик заготовок) с механическим, магнитным или вакуумным захватом: привод, обеспечивающий фиксированный поворот ручки, ее подъем и опускание в крайних точках поворота [1]
Недостаток аналога заключается в низкой производительности и трудоемкости обслуживания и ремонта.
Наиболее близким по технической сущности и достигаемому экономическому эффекту является питатель "Механическая рука" марки UF фирмы "ХАМФРИС ЛТД", принятый за прототип. [2]
Известный манипулятор "Механическая рука" содержит руку (укладчик заготовок) в виде трубки с вакуумным каналом и вакуумным захватом, закрепленную на подпружиненной штанге; привод из электродвигателя и кулачка; двухплечий рычаг, одно плечо которого через ролик взаимодействует с кулачком привода, а другое шарнирно связано с подпружиненной штангой, на которой закреплена рука; шатун, один конец которого эксцентрично через шарнир соединен с кулачком, другой через рычаг шарнирно соединен со штангой, на которой закреплена рука; систему управления, обеспечивающую синхронность работы манипулятора и рабочей машины; командоаппарат и пневмосистему.
В пневмосистему входят: ресивер, редукционный клапан, вакуумный блок (устройство образования вакуума при прохождении струи сжатого воздуха через эжектор), пневмораспределители и дроссель с обратным клапаном.
В прототипе электродвигатель через редуктор передает вращение кулачку, который, контактируя своей профильной поверхностью с роликом двухплечего рычага, заставляет последний качаться на оси и два раза за один оборот кулачка поднимать и опускать штангу. Шатун, эксцентрично установленный на кулачке, через рычаг, закрепленный на штанге, за один оборот кулачка заставляет руку поворачиваться туда и обратно. Таким образом, за один оборот кулачка рука на исходной позиции опускается, берет заготовку, поднимается, переносит заготовку на рабочую позицию (в пресс), опускается, укладывает заготовку в ручей штампа, поднимается без заготовки и возвращается на исходную позиции за следующей заготовкой, которую подготовил оператор. Вакуум для работы вакуумного захвата образовывается в вакуумном блоке при прохождении струи сжатого воздуха, управление подачей струи сжатого воздуха в вакуумный блок осуществляется пневмораспределителем с электроуправлением, управляющий сигнал на который поступает из системы управления от кулачков командоаппарата. Работа с питателем "Механическая рука" позволяет в 2-3 раза увеличить производительность по сравнению с традиционной штамповкой, когда оператор укладывает заготовку непосредственно в пресс, т.к. оператор после укладки заготовки обеими руками нажимает на кнопки двурукого пульта для включения пресса. При работе с питателем "Механическая рука" оператор в одной руке держит стопу заготовок, а другой подкладывает их под захват.
Однако такой питатель имеет свои недостатки. Управление срабатыванием вакуумного захвата при взятии заготовки на исходной позиции и укладкой заготовки в штамп пресса производится по следующей цепочке. От кулачков командоаппарата поступает сигнал в систему управления, где формируется команда электромагниту пневмораспределителя, электромагнит перемещает золотник пневмораспределителя, сжатый воздух поступает в вакуумный блок, от которого вакуум распространяется по каналу до захвата. Такая длинная цепь приводит к запаздыванию срабатывания включения и выключения вакуума, что не обеспечивает надежный захват или точную укладку заготовок в ручей штампа, поэтому при изменении скорости манипулятора необходимо регулировать момент подачи сигнала от командоаппарата, что приводит к увеличению времени простоя при переналадке. Кроме того, прототип не имеет устройства контроля заготовки на захвате, и если она упадет из захвата несанкционированно (например, в связи с засорением вакуумного канала смазкой с заготовок) в зоне штампа, т.е. не будет точно уложена в свое гнездо, пресс при рабочем ходе может сломать штамп или произойдет заклинивание пресса в нижней точке.
Техническим результатом изобретения является исключение недостатков путем сокращения рабочих органов в системе управления вакуумом и введением в пневмосистему датчика контроля наличия заготовки в захвате.
Указанный результат достигается тем, что переключение подачи воздуха в эжектор вакуумного блока производится механически непосредственно от привода при опускании и подъеме руки манипулятора, что сокращает время на срабатывание пневмосистемы и нет необходимости регулировать момент подачи воздуха в вакуумный блок. Кроме этого, в систему на глухом вакуумном канале вводится датчик мембранного типа, мембрана которого взаимодействует с датчиком системы управления, которая с получением сигнала от датчика формирует размещенную или запрещающую команду на рабочий ход пресса.
На чертеже представлена схема предлагаемого манипулятора с вакуумным захватом.
Манипулятор содержит руку 1 с вакуумным захватом 2, закрепленную на подпружиненной штанге 3, которая поворачивается на угол, обеспечивающий перенос заготовки из исходной позиции в рабочую при вращении кулачка 4 через шатун 5, эксцентрично установленный на кулачке 4 и шарнирно соединяемый с рычагом 6, также закрепленном на штанге 3; двухплечий рычаг 7, один конец которого шарнирно соединен со штангой 3, а второй снабжен роликом 8. Ролик 8, будучи постоянно прижат к кулачку 4 пружиной 9 и, обкатываясь по нему, обеспечивает подъем и опускание штанги 3 в крайних точках поворота руки 1. Пневмосистема манипулятора состоит из вакуумного блока 10, отработанный сжатый воздух из которого выходит через клапан 11, шток 12 клапана 11 при опускании руки 1 в одном из крайних положений поворота руки нажимается винтом 13, установленным на рычаге 6 вакуумного канала 14 с гибкой трубкой 15, по которым вакуум от вакуумного блока 10 распространяется до захвата 2; вакуумной гибкой трубки 16, по которой вакуум распространяется от захвата 2 до вакуумного датчика 17, мембрана 18 которого через контакт 19 и пружину взаимодействует с датчиком 20 системы управления; направляющей 21, в которой перемещается рукоятка 22, соединенная с клапаном 12. Пружина обозначена позицией 23.
Устройство работает следующим образом. Рука 1 с захватом 2, закрепленная на штанге 3, поворачивается при вращении кулачка 4 через шатун 5 и рычаг 6. Ролик 8 двухплечего рычага 7, обкатываясь по кулачку 4, заставляет штангу 3 опускаться, когда контактирует с вогнутой поверхностью кулачка 4, опускает штангу 3 с закрепленной на ней рукой 1 пружина 9. Вакуумный блок 1о образовывает вакуум, который распространяется по каналам 14 и 15 до захвата 2, который захватывает заготовку на исходной позиции. На этой позиции винт 13, установленный на рычаге 6, закрепленном на штанге 3, опускаясь вместе с рукой 1 и захватом 2 для взятия заготовки, не попадает на шток 12 клапана 11 и воздух из блока свободно проходит через клапан. При дальнейшем повороте кулачка 4 ролик 8 выходит на выпуклую поверхность кулачка, штанга 3 поднимается и поворачивается, перенося заготовку на рабочую позицию. На рабочей позиции винт 13, опускаясь, нажимает на шток 12, который перекрывает отверстие в клапане 11 и воздух, поступающий в вакуумный блок 10, поступает в каналы 14 и 15, сбрасывая заготовку с захвата 2 принудительно. Рукояткой 22, установленной в направляющей 21, наладчик может переместить клапан 11 в положение, когда винт 13 не попадает на шток 12 ни в одном из положений руки 1, и тогда заготовка будет оставаться на захвате, а рука будет переносить заготовку из первой позиции во вторую и обратно, не сбрасывая ее, что нужно наладчику для настройки положения исходной позиции относительно рабочей. Мембрана 18 вакуумного датчика 17 прогибается, преодолевая сопротивление пружины 23, когда заготовка прижата к захвату 2, т.е. когда происходит герметизация вакуумных каналов 14, 15, 16 и полости датчика 17. Датчик 20 системы управления через контакт 19 выключится, и система управления сформирует команду на срабатывание пресса на рабочей позиции, но, если заготовка упадет с захвата несанкционированно, т.е. раньше, чем будет уложена в гнездо штампа, вакуумные каналы 14, 15, 16 разгерметизируются и мембрана 18 снова будет отжата пружиной 23, датчик 17 включится, сформированная системой управления команда блокирует запуск пресса, и пресс не сделает рабочего хода, что предотвратит возможную поломку штампа.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1996 |
|
RU2116855C1 |
| Автоматическая линия безоблойной штамповки | 1980 |
|
SU889482A1 |
| Установка для автоматической штамповки | 1980 |
|
SU867671A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1328036A1 |
| ПРЕСС СРАЩИВАНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КЛЕЕНОГО БРУСА | 2001 |
|
RU2180883C1 |
| Рука механическая к обрабатывающей машине | 1977 |
|
SU725865A1 |
| ПЕРЕДАТОЧНОЕ УСТРОЙСТВО И ПРЕДНАЗНАЧЕННАЯ ДЛЯ НЕГО ПРИВОДНАЯ СИСТЕМА ДЛЯ МНОГОПОЗИЦИОННЫХ ПРЕССОВ С АВТОМАТИЧЕСКОЙ ПЕРЕДАЧЕЙ ОБРАБАТЫВАЕМЫХ ЗАГОТОВОК С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1988 |
|
RU2020073C1 |
Использование: изобретение относится к области машиностроения, в частности к автоматизации технологических процессов, и может быть использовано для механизированной подачи заготовок в рабочую машину. Сущность изобретения: манипулятор с вакуумным захватом содержит датчик контроля наличия заготовки на захвате, установленный на глухом вакуумном канале перед захватом, мембрана которого взаимодействует с электрическим датчиком системы управления, а также механический клапан золотникового типа, установленный с возможностью взаимодействия с приводом манипулятора посредством нижимного винта. Манипулятор обеспечивает синхронность работы манипулятора и рабочей машины. Система управления обеспечивает блокировку запуска пресса в случае, если заготовка не будет уложена в гнездо штампа. 1 ил.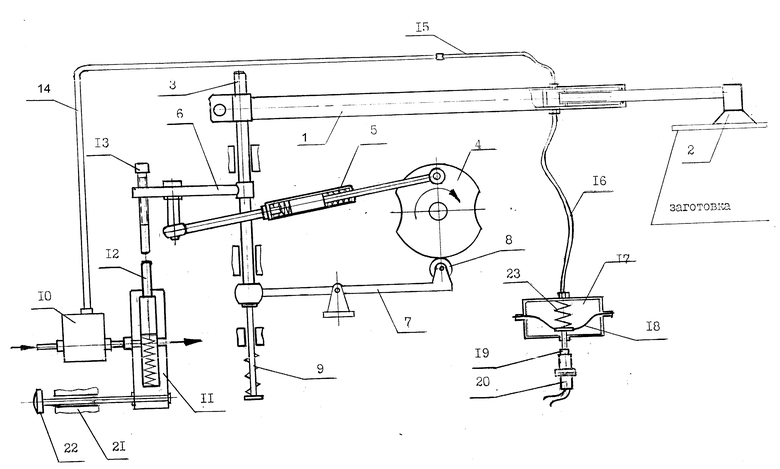
Манипулятор с вакуумным захватом, содержащий несущую захват руку, закрепленную на подпружиненной в осевом направлении штанге, смонтированной с возможностью поворота относительно продольной оси от привода, пневмосистему, состоящую из вакуумного блока, пневмораспределителей и вакуумных каналов связи, а также систему управления, обеспечивающую синхронность работы манипулятора и рабочей машины, отличающийся тем, что он снабжен установленным на расположенном перед захватом и выполненным глухим вакуумном канале датчиком наличия заготовки на захвате, мембрана которого установлена с возможностью взаимодействия с введенным в систему управления электрическим датчиком, при этом на выходе вакуумного блока установлен механический клапан золотникового типа, смонтированный с возможностью взаимодействия и регулирования пятна контакта с нажимным винтом, связанным с приводом манипулятора посредством рычага, установленного на штанге.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1754442, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прессовое оборудование фирмы "Хамфрис Лтд." Проспект фирмы "Механическая рука марки VF", 1968. | |||
