Изобретение относится к области различного рода движительных и тяговых устройств.
Известен способ механического взаимодействия тел, приводящих к созданию тягового усилия, приложенного к механической системе связанных между собой тел. В этом способе изменение суммарного импульса системы может быть обусловлено только посредством внешней силы, возникающей в результате создания взаимодействия с использованием силовых полей различных векторных структур и различной физической природы между некоторыми телами системы и телами, пространственно расположенными вне системы и механически в нее не входящими, например внешней средой [1].
Недостаток известного способа состоит в невозможности изменения суммарного импульса системы при взаимодействии тел, размещенных в пространстве, занимаемом системой.
Наиболее близким по технической сущности и достигаемому результату к предложенному способу относится способ механического взаимодействия тел для создания тягового усилия в механической системе, включающий в себя приведение во вращение первого тела вокруг первого центра, создание вращения вокруг первого центра вторых тел и одновременное их перемещение по радиусам первого тела с обеспечением постоянства расстояний вторых тел относительно второго центра [2].
Недостатком известного способа, принятого за прототип, является низкая надежность, обусловленная необходимость. обеспечения перемещения вторых тел по весьма сложной траектории: одновременно и по окружности, и по радиусу.
Технический результат изобретения - повышение надежности.
Указанный технический результат в предложенном способе механического взаимодействия тел для создания тягового усилия в механической системе, включающий использование силовых полей различных векторных структур, при этом в первом теле системы генерируют первообразное силовое поле, достигается тем, что посредством первообразного поля индуцируют во втором теле производное силовое поле, создают взаимодействие между вторым телом и третьим телом, при этом действие третьего тела на второе тело преобразуют в соответствии с векторной структурой производного силового поля в совокупность сил и прикладывают к первому телу, а равнодействующую сил производного поля, действующих на третье тело со стороны второго тела, прикладывают ко всем телам системы.
Предложены также конкретные варианты реализации способа, в которых:
- векторную структуру первообразного силового поля в первом теле создают из условия неравенства нулю потока вектора напряженности производного силового поля через замкнутую поверхность, разделяющую первое и второе тела;
- векторную структуру производного силового поля, индуцируемого во втором теле, создают из условия неравенства нулю потока вектора напряженности производного поля через замкнутую поверхность, разделяющую первое и второе тело;
- в качестве второго тела применяют жидкость;
- производное силовое поле индуцируют в жидкости в виде поля центральных сил выталкивания;
- первообразное силовое поле генерируют в виде центробежных сил инерции посредством приведения во вращение первого тела;
- индуцирование в жидкости производного поля центральных сил выталкивания осуществляют путем приведения жидкости и первого тела в совместное вращение с формированием в первом теле жидкостного кольцевого цилиндра;
- взаимодействие третьего тела со вторым телом осуществляют, с одной стороны, в виде выталкивания жидкостью, в которой индуцировано поле центральных сил, по направлению, не меняющемуся в процессе взаимодействия, третьего тела, погружаемого в часть сформированного жидкостного кольцевого цилиндра, а, с другой стороны, действие третьего тела на жидкость равномерно распределяют по поверхности, разделяющей первое тело и жидкость, в соответствии с векторной структурой производного поля центральных сил.
Сущность изобретения поясняется фиг. 1 - 5.
На фиг. 1, а,б,в,г отражены в общем силовые поля, возникающие в системе в процессе реализации способа:
фиг. 1, а - первообразное поле; фиг. 1,б - производное поле; фиг. 1,в - равнодействующая элементарных сил, действующих на третье тело со стороны производного поля во втором теле, приложенная в виде силы тяги ко всем телам системы; фиг. 1,г - схема распределения на замкнутую поверхность, разделяющую первое и второе тела, силовой реакции тел системы на третье тело, взаимодействующее с производным полем во втором теле.
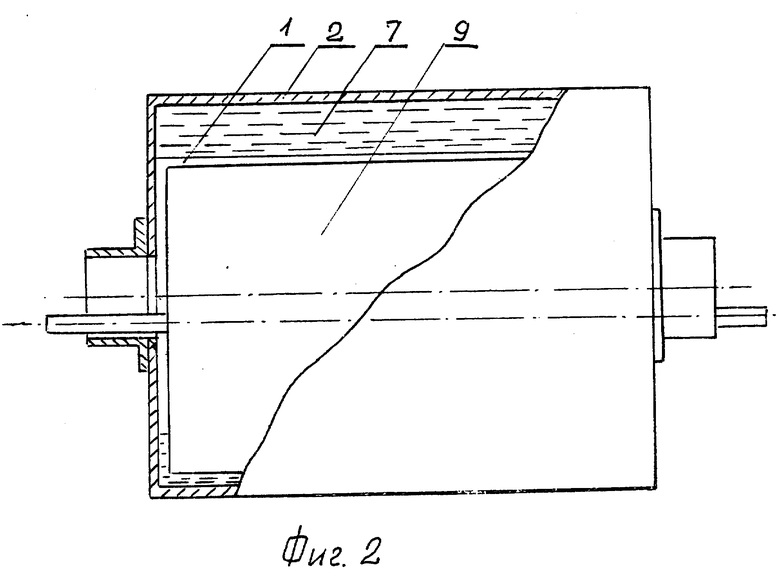
На фиг. 2 отражены взаимодействующие тела устройства, реализующего частный вариант предложенного способа - посредством приведения первого тела (барабана) и жидкости в совместное вращение и погружения третьего тела (части объема цилиндра).
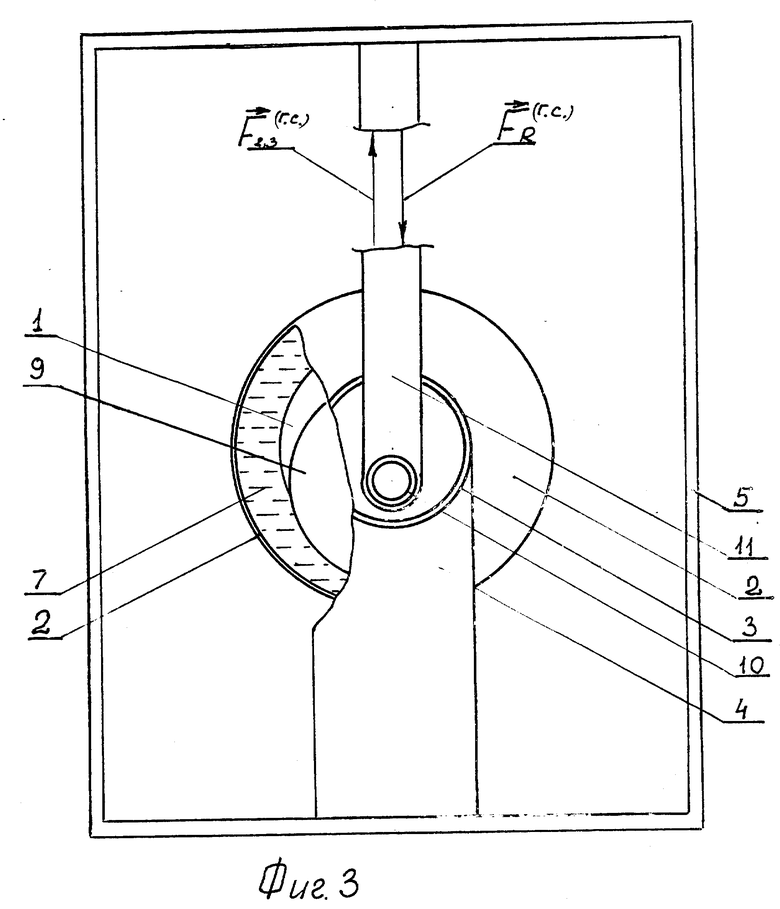
На фиг. 3 дан вид устройства, реализующего частный вариант предложенного способа, и отражена схема образования внутренних усилий в устройстве вследствие гидростатического, т. е. обусловленного полем тяготения, выталкивания жидкостью погруженного в нее тела.
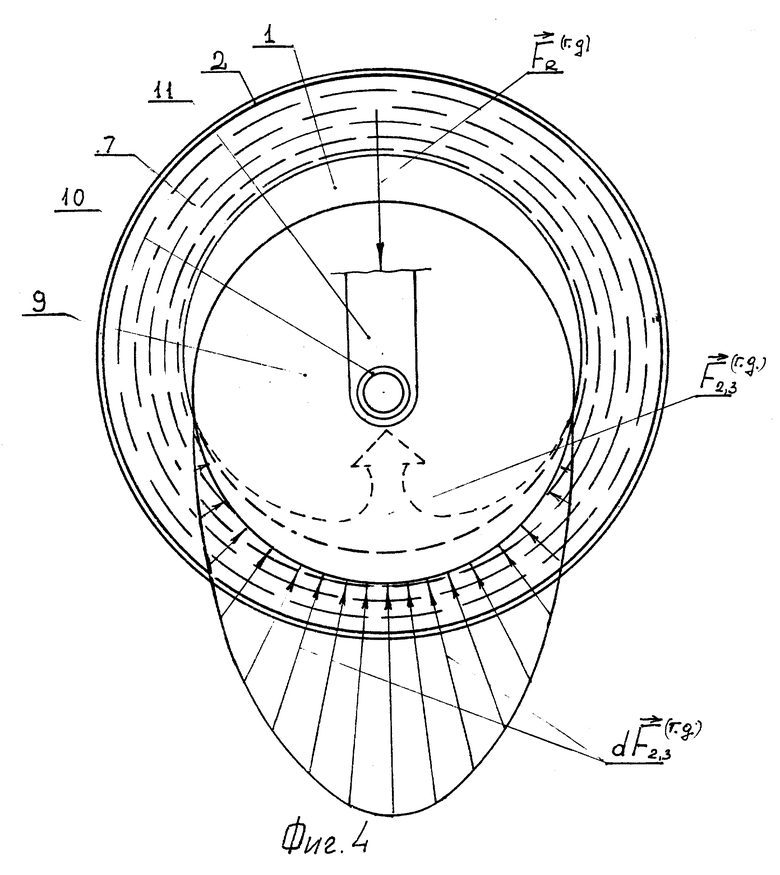
На фиг. 4 отражено распределение элементарных сил гидродинамического давления со стороны вращающейся жидкости на погруженную в нее часть цилиндра.
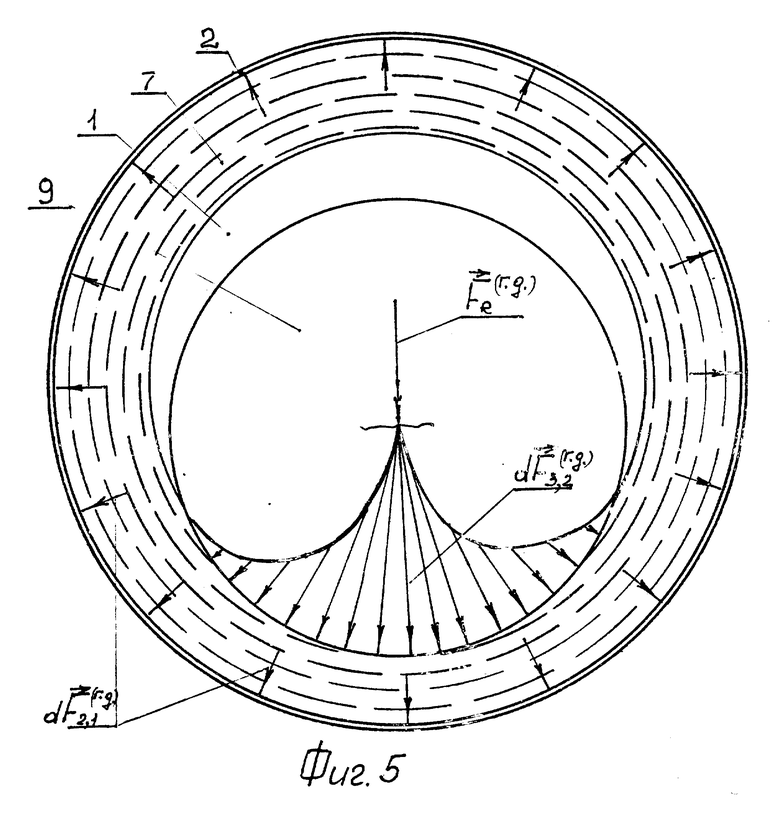
На фиг. 5 изображено распределение элементарных сил гидродинамического давления, производимого цилиндром, на вращающуюся жидкость, и равномерное распределение центральных сил гидродинамического давления, производимого жидкостью, на внутреннюю поверхность барабана.
Предложенный способ взаимодействия тел реализуется следующим образом.
В полости 1 (фиг. 1, а,б,в,г), находящейся внутри первого тела 2 (в частном варианте реализации способа - в полости барабана 2 (фиг. 2 - 5), посредством определенного физического процесса (в частном варианте способа - посредством приведения во вращение барабана 2 в подшипниках 3, установленных в опорах 4, смонтированных на каркасе 5, в общем случае, выполняющем функцию всей совокупности тел системы (поз. 5 фиг. 1, а,б,в,г)), генерируют первообразное поле 6 (в частном варианте реализации способа - поле центробежных сил инерции), с помощью которого индуцируют во втором теле 7 (в частном варианте - в жидкости 7 фиг. 2 - 5), размещенных в полости 1, производное силовое поле 8 (в частном варианте - поле центральных сил гидродинамического выталкивания).
В предпочтительных вариантах реализации предложенного способа векторные структуры как первообразного силового поля 6, так и производного силового поля 8 создают из условия неравенства нулю потоков векторов напряженности этих полей через замкнутую поверхность, разделяющую первое тело 2 и второе тело 7, т. е.
Здесь интегрирование ведется по поверхности S(1,2), разделяющей первое и второе тела; соответственно значение напряженностей первообразного и производного полей;
соответственно значение напряженностей первообразного и производного полей; векторы нормалей к площадкам dS, направленные в одну и ту же сторону относительно поверхности S(1,2).
векторы нормалей к площадкам dS, направленные в одну и ту же сторону относительно поверхности S(1,2).
В частном варианте реализации способа во внутреннюю полость 1 вращающегося барабана 2 подают жидкость 7, выполняющую функцию второго тела, которая под действием сил внутреннего трения увлекается во вращение поверхностью барабана 2, принимая форму кольцевого жидкостного цилиндра (поз. 7 фиг. 2 - 5).
В жидкость 7, в которой индуцировано производное поле 8, погружают третье тело 9 системы (фиг. 1, а,б,в,г), которое, в частном варианте, для повышения эффективности взаимодействия с вращающейся жидкостью 7 выполняют в форме прямого кругового цилиндра 9 (фиг. 2 - 5) и также приводят во вращение в подшипниках 10, установленных на траверсах 11, смонтированных на каркасе 5, с угловой скоростью, совпадающей по направлению и величине с угловой скоростью вращения барабана 2.
Погружение части объема вращающегося цилиндра 9 во вращающуюся жидкость 7 обуславливает уменьшение радиуса ее свободной поверхности и вызывает две принципиально отличающиеся по результатам силовые реакции, действие которых может быть рассмотрено на основе закона независимости действия сил.
В стационарном состоянии сила  производящая выталкивание цилиндра 9 из вращающейся жидкости 7, является равнодействующей двух сил выталкивания
производящая выталкивание цилиндра 9 из вращающейся жидкости 7, является равнодействующей двух сил выталкивания  первая из которых индуцируется полем тяготения, а вторая - первообразным полем центробежных сил инерции:
первая из которых индуцируется полем тяготения, а вторая - первообразным полем центробежных сил инерции:
При этом
где  сила, приложенная к траверсам 11 со стороны каркаса 5 и обеспечивающая погружение цилиндра 9 во вращающуюся жидкость 7.
сила, приложенная к траверсам 11 со стороны каркаса 5 и обеспечивающая погружение цилиндра 9 во вращающуюся жидкость 7.
1. Сила гидростатического выталкивания F цилиндр 9 действует на жидкость 7 независимо от того, покоится она, или движется. Давление, производимое цилиндром 9 на жидкость 7, в соответствии со структурой поля сил выталкивания, параллельных силам тяготения, передается на дно барабана 2 и далее на подшипники 3. В итоге, к каркасу 5 оказываются приложенными две противоположно направленные силы
цилиндр 9 действует на жидкость 7 независимо от того, покоится она, или движется. Давление, производимое цилиндром 9 на жидкость 7, в соответствии со структурой поля сил выталкивания, параллельных силам тяготения, передается на дно барабана 2 и далее на подшипники 3. В итоге, к каркасу 5 оказываются приложенными две противоположно направленные силы  , равные по величине, которые полностью компенсируют друг друга, вызывая возникновение растягивающих напряжений в стойках каркаса 5, а также увеличение силы давления на подшипники 3 и 10 соответственно на величины
, равные по величине, которые полностью компенсируют друг друга, вызывая возникновение растягивающих напряжений в стойках каркаса 5, а также увеличение силы давления на подшипники 3 и 10 соответственно на величины  представляет собой гидростатическую составляющую силы
представляет собой гидростатическую составляющую силы 
Иными словами, результирующая сила, приложенная к системе тел, находящихся в поле тяготения, содержащей сосуд с жидкостью, в который погружено одно из тел системы, тождественно равна весу всех составных элементов системы.
Для этого случая величины суммарных потоков через замкнутую поверхность S(1,2), разделяющую первое и второе тела, векторов напряженностей поля тяготения и индуцированного в жидкости 7 поля параллельных сил выталкивания, определяемые по уравнениям (1) и (1'), равны нулю.
2. Сила гидродинамического выталкивания  являющаяся равнодействующей элементарных центральных сил выталкивания
являющаяся равнодействующей элементарных центральных сил выталкивания  приложенная к цилиндру 9, частично погруженному во вращающуюся жидкость 7, индуцируется центробежными силами инерции, возникающими внутри вращающегося барабана 2 (фиг. 4). Гидродинамическое давление во вращающейся жидкости направлено нормально к внутренней поверхности барабана 2 и вызывает возникновение в нем растягивающих напряжений; сумма же проекций элементарных сил гидродинамического давления
приложенная к цилиндру 9, частично погруженному во вращающуюся жидкость 7, индуцируется центробежными силами инерции, возникающими внутри вращающегося барабана 2 (фиг. 4). Гидродинамическое давление во вращающейся жидкости направлено нормально к внутренней поверхности барабана 2 и вызывает возникновение в нем растягивающих напряжений; сумма же проекций элементарных сил гидродинамического давления  на любую ось, в том числе и на направление погружения цилиндра 9 (в описываемом примере оно совпадает с вертикальным), всегда равна нулю, т. е. изменения величин гидродинамического давления во вращающейся жидкости 7 и механических напряжений в барабане 2, обусловленные, например, изменением скорости вращения, никоим образом не могут сказаться на изменении веса системы.
на любую ось, в том числе и на направление погружения цилиндра 9 (в описываемом примере оно совпадает с вертикальным), всегда равна нулю, т. е. изменения величин гидродинамического давления во вращающейся жидкости 7 и механических напряжений в барабане 2, обусловленные, например, изменением скорости вращения, никоим образом не могут сказаться на изменении веса системы.
Сила гидродинамического выталкивания  являясь частью общей силы выталкивания
являясь частью общей силы выталкивания  приложена к цилиндру 9, а через траверсы 11 - к каркасу 5 и, соответственно, ко всем телам системы, жестко связанным с ним (фиг. 4). Сила
приложена к цилиндру 9, а через траверсы 11 - к каркасу 5 и, соответственно, ко всем телам системы, жестко связанным с ним (фиг. 4). Сила  - гидродинамическая составляющая силы
- гидродинамическая составляющая силы  с которой цилиндр 9 действует на вращающуюся жидкость 7 (фиг. 5), преобразуется в совокупность элементарных сил
с которой цилиндр 9 действует на вращающуюся жидкость 7 (фиг. 5), преобразуется в совокупность элементарных сил  направленных перпендикулярно погруженной части поверхности цилиндра 9, и вследствие наличия в жидкости силового поля 8 с центрально-осевой структурой оказывается в конечном итоге равномерно распределенной по всей внутренней поверхности вращающегося барабана 2.
направленных перпендикулярно погруженной части поверхности цилиндра 9, и вследствие наличия в жидкости силового поля 8 с центрально-осевой структурой оказывается в конечном итоге равномерно распределенной по всей внутренней поверхности вращающегося барабана 2.
Увеличение же силы давления на подшипники 3 происходит только вследствие параллельных сил выталкивания, индуцируемых полем тяготения, и не может сказаться на изменении, например, веса системы.
Величины потоков векторов напряженностей через поверхность S1,2 как первообразного поля - поля центробежных сил инерции, так и производного поля - поля центральных сил выталкивания во вращающейся жидкости, не равны нулю. Это объясняется тем, что угол между направлением нормали  к элементу dS цилиндрической поверхности барабана и направлением векторов напряженности обоих полей равен нулю, а потому значение cosα в скалярном произведении
к элементу dS цилиндрической поверхности барабана и направлением векторов напряженности обоих полей равен нулю, а потому значение cosα в скалярном произведении  равно 1.
равно 1.
Таким образом, в предложенном способе механического взаимодействия тел, направленная вдоль траверс 11 сила гидродинамического выталкивания, приложенная ко всем телам системы со стороны производного поля 8, не уравновешивается силой, равной ей по величине и противоположно направленной; обратное действие тел системы на производное поле, направленное по прямой линии, преобразуется в совокупность центральных сил, равномерно растягивающих барабан 2. Последнее, в свою очередь, и является причиной появления нескомпенсированного усилия Fт определенного направления, приложенного ко всем телам системы:
Абстрагируясь от конкретных конструктивных особенностей устройства, реализующего предложенный способ, можно сделать вывод, что в качестве материального объекта - опоры, механически независимого от системы, т. е. не относящегося к числу ее тел, но находящегося в пространстве, занимаемом системой, можно использовать силовые поля, создаваемые внутри системы. При этом неравный нулю импульс силы, приложенный ко всем телам системы, возникает, когда опорные поля имеют векторную структуру, удовлетворяющую уравнению (1'), и являются производными, т. е. созданными в определенных физических процессах другими, первообразными полями, причем последние могут генерироваться и телами самой системы. Так, в частном варианте предложенного способа первообразное поле - это центрально-осевое поле центробежных сил инерции, а производное поле - центрально-осевое поле сил выталкивания, индуцируемое первообразным полем в приведенной во вращение жидкости.
Предложенный способ открывает возможность создания универсальных тяговых элементов, конструктивно независящих от свойств внешней среды.
Источники информации:
1. Яворский Б.М., Детлаф А.А. Справочник по физике. - М.: Наука, 1990, 624 с.
2. ИК Patent Application GB 2111654 A 1981. Applicant Agofure Anthony Etaniyohwo, 173 Aba Road, po Box 535, Port Harсourt, Nigeria.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОХЛАЖДЕНИЯ ПАРТИИ ПОЛИМЕРНЫХ КОНТЕЙНЕРОВ С ДОНОРСКОЙ КРОВЬЮ И АППАРАТУРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2283993C1 |
| УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ РЕВЕРСИВНЫХ ТЕПЛОВЫХ ВОЗДЕЙСТВИЙ НА УЧАСТКЕ ТЕЛА ЧЕЛОВЕКА | 2010 |
|
RU2479289C2 |
| СПОСОБ ОЦЕНКИ ВНЕШНИХ И ВНУТРЕННИХ ПАРАМЕТРОВ УЗЛОВ ТРЕНИЯ ПРИ ИСПЫТАНИИ В СТЕНДОВЫХ УСЛОВИЯХ | 2015 |
|
RU2647338C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ФИЗИЧЕСКИХ ТЕЛ В ОКОЛОПЛАНЕТНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2463220C2 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО ОПРЕДЕЛЕНИЯ ГРАНИЦ ОДНОРОДНЫХ НАМАГНИЧИВАЕМЫХ ВКЛЮЧЕНИЙ ВНУТРИ ОБЪЕКТА | 2024 |
|
RU2829594C1 |
| СПОСОБ СОЗДАНИЯ СИЛОВЫХ ИМПУЛЬСОВ И УДАРНЫЙ ИНВЕРСИОННЫЙ ДЕЗАКСИАЛЬНЫЙ МЕХАНИЗМ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2407900C2 |
| Гидродинамический гироскоп | 2021 |
|
RU2769078C1 |
| МАГНИТОВЯЗКИЙ РОТАТОР | 2006 |
|
RU2325754C1 |
| ФЕРРОМАГНИТОВЯЗКИЙ РОТАТОР | 2005 |
|
RU2309527C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРЕЦЕССИИ ЛИТОСФЕРЫ ВОКРУГ МАНТИИ ПЛАНЕТЫ | 2004 |
|
RU2263974C2 |
Способ предназначен для создания движительных тяговых устройств. Способ включает использование силовых полей различных векторных структур, при этом в первом теле системы генерируют первообразное силовое поле, посредством которого индуцируют во втором теле производное силовое поле, создают взаимодействие между вторым и третьим телами, при этом действие третьего тела на второе тело преобразуют в соответствии с векторной структурой производного силового поля в совокупность сил и прикладывают к первому телу, а равнодействующую сил производного поля, действующих на третье тело со стороны второго тела, прикладывают ко всем телам системы. Способ позволяет повысить надежность создания тягового усилия. 7 з.п.ф-лы, 5 ил.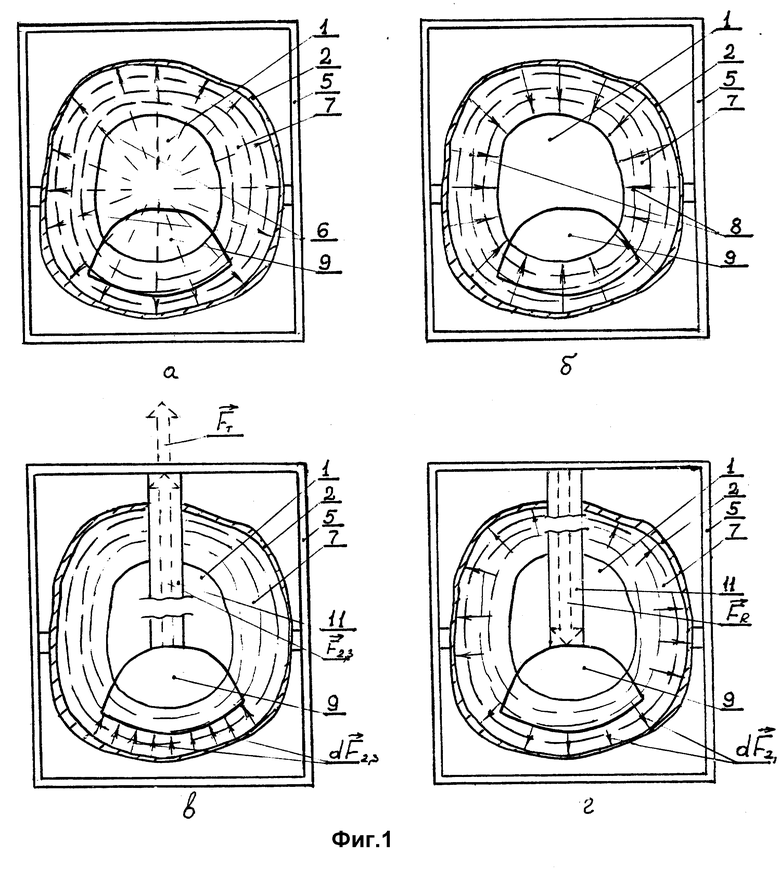
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПУЛЬСАТОР | 1996 |
|
RU2111654C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Огнетушитель | 0 |
|
SU91A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| RU 2055235 C1, 27.02.96 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Вибровозбудитель инерционного движителя | 1988 |
|
SU1513174A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Инерционный двигатель | 1980 |
|
SU939817A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| GB 1412146 A, 1975. | |||
