Изобретение относится к диагностированию технического состояния колесных транспортных средств и может быть использовано для измерения как угловых перекосов, так и перекосов прицепов.
Известны способы измерения перекосов мостов на специальных стендах (см. Харазов А.М. Диагностическое обеспечение технического обслуживания и ремонта автомобилей. М. Высшая школа, 1990, с. 92-97).
Недостатками известных способов являются трудоемкость поддержания в рабочем состоянии сложного оборудования и необходимость существенных затрат на его приобретение.
Наиболее близким аналогом является способ и устройство для его осуществления, позволяющие измерять перекосы мостов и прицепов автомобиля (патент SU N 1831671, опубл. в БИ N 28, 1993 г.).
Недостатками способа являются трудоемкость проведения измерений и необходимость изготовления сложного устройства для осуществления способа.
Задачей изобретения является упрощение процесса измерений и использование обычных роликовых стендов без каких-либо изменений.
Поставленная задача решается тем, что:
1. В способе измерения углового перекоса мостов двухосного транспортного средства, преимущественно автомобиля, заключающемся в том, что колеса заднего моста устанавливают на роликовые опоры, приводят роликовые опоры во вращение и, используя возникающие при этом из-за перекоса моста боковые усилия, направленные вдоль осей роликовых опор, определяют угол перекоса заднего моста в горизонтальной плоскости относительно продольной оси автомобиля - роликовые опоры, установленные неподвижно в осевом направлении, вращают с условием прямого направления вращения колес до окончания их перемещения вдоль осей роликовых опор и измеряют угол между продольной осью автомобиля и линией, перпендикулярной осям роликовых опор в горизонтальной плоскости, равный углу перекоса заднего моста автомобиля.
2. В способе измерения углового перекоса мостов двухосного тягача с прицепом, заключающемся в том, что колеса заднего моста тягача и колеса прицепа устанавливают на роликовые опоры, приводят роликовые опоры во вращение и, используя возникающие при этом на колесах заднего моста тягача и колесах прицепа из-за их перекосов боковые усилия, направленные вдоль осей роликовых опор, определяют углы перекоса заднего моста тягача и прицепа в горизонтальной плоскости относительно продольных осей соответственно тягача и прицепа - на одни и те же роликовые опоры, установленные неподвижно в осевом направлении, сначала устанавливают колеса заднего моста тягача, вращают с условием прямого направления вращения колес до окончания их перемещения вдоль осей роликовых опор, измеряют угол между продольной осью тягача и линией, перпендикулярной осям роликовых опор в горизонтальной плоскости, равный углу перекоса моста тягача, затем перемещают тягач вперед с соблюдением параллельности перемещения передней части тягача линии, перпендикулярной осям роликовых опор, до установки на роликовые опоры колес прицепа, вращают роликовые опоры с условием прямого направления вращения колес прицепа до окончания их перемещения вдоль осей роликовых опор и измеряют угол между продольной осью прицепа и линией, перпендикулярной осям роликовых опор, равный углу перекоса прицепа.
Рассмотрим способ на примере автобуса.
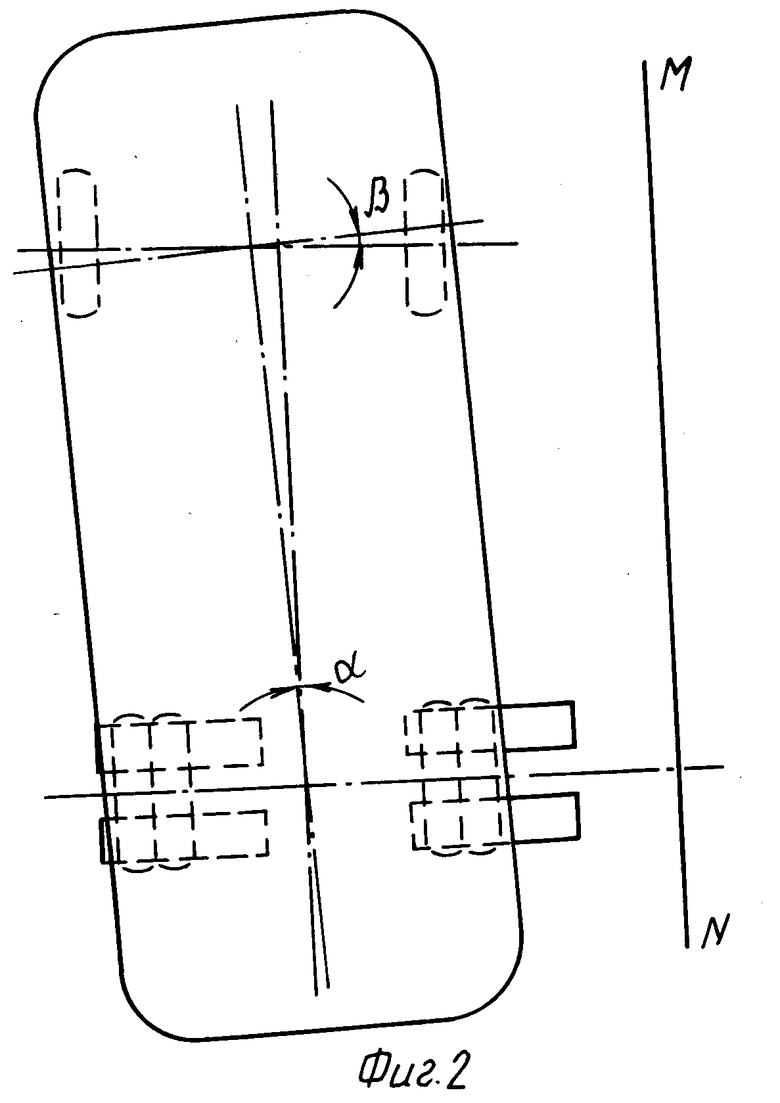
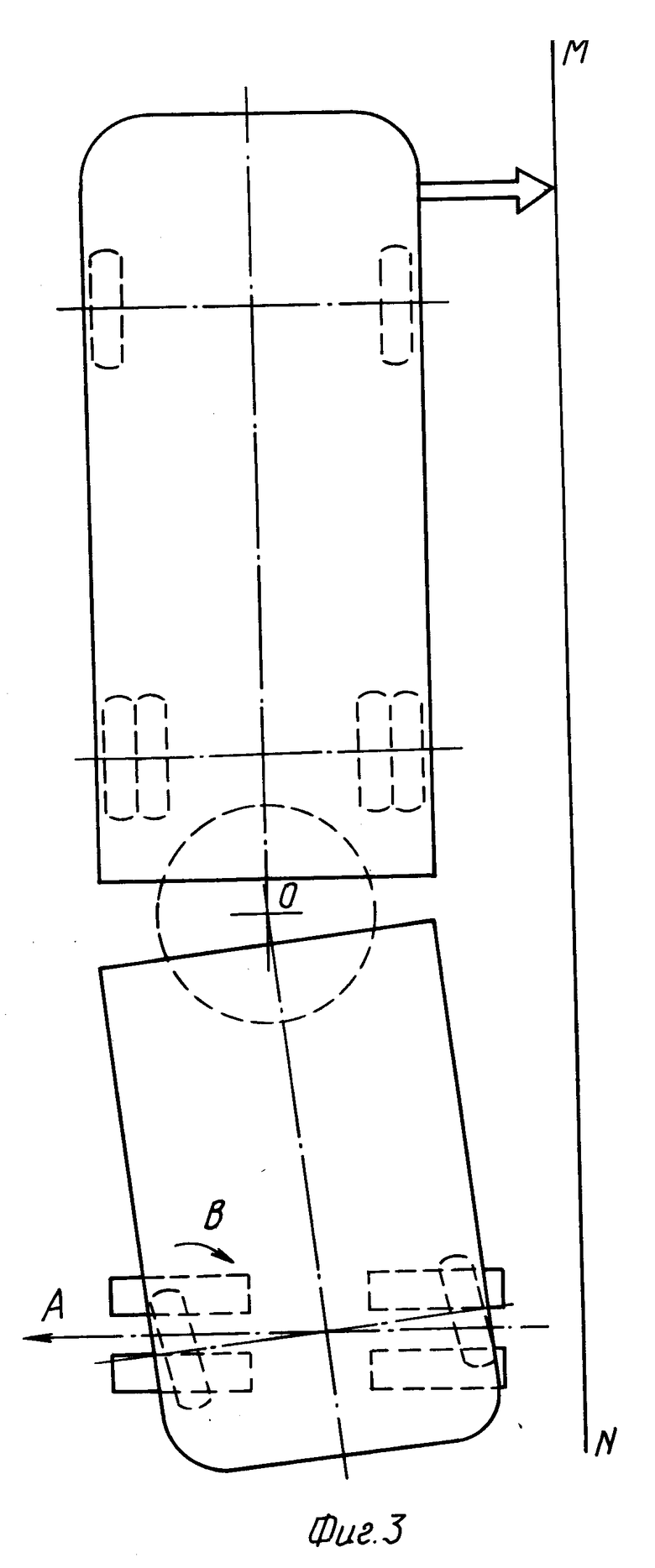
На фиг. 1 изображен автобус в исходном положении; на фиг.2 - положение автобуса в результате вращения роликов; на фиг.3 - автобус с прицепом.
Пусть автобус установлен задними колесами на ролики стенда, при этом в общем случае задний мост не параллелен осям роликов (фиг.1). Если начать вращение роликов - с приводом от двигателя автобуса или электромоторов стенда - с условием прямого направления вращения колес (т.е. направления, соответствующего движению автомобиля вперед), то колеса, "навинчиваясь" на ролики, станут перемещаться в направлении стрелки А, а весь автобус будет поворачиваться вокруг средней точки К переднего моста (точнее, будет иметь место малое перемещение этой точки KL). Движение вдоль роликов закончится, когда колеса станут перпендикулярны роликам. Таким образом, в результате вращения роликов задний мост установится параллельно осям роликов (фиг.2).
Для проведения измерений на полу помещения наносят прямую MN, перпендикулярную осям роликов. Теперь для определения угла α перекоса заднего моста достаточно с помощью отвеса измерить расстояние a в передней и b в задней частях автобуса между проекцией на полборта автобуса и линией MN:
где C - расстояние между рассматриваемыми точками проекции.
Перекос прицепа следует измерять после обеспечения параллельности задних колес тягача и колес прицепа, поскольку именно так они самоориентируются при движении автобуса по прямой.
Пусть в результате вращения роликов задняя ось тягача установилась параллельно осям роликов. Начнем движение автобуса вперед, соблюдая при этом параллельность перемещения передней части тягача линии MN, для чего используется прикрепляемый к автобусу указатель. Поскольку задние колеса также параллельны этой линии, движение тягача будет поступательным, вследствие чего задняя ось будет оставаться параллельной осям роликов. Движение следует прекратить, когда колеса прицепа установятся на ролики (фиг.3).
При вращении роликов в том же направлении колеса прицепа начнут перемещаться в направлении стрелки A, а сам прицеп - поворачиваться вокруг оси поворотного круга O. В случае управляемых колес прицепа благодаря действию рулевой тяги колеса будут поворачиваться относительно кузова в направлении стрелки B, что приведет к более быстрой ориентации колес перпендикулярно роликам. Таким образом, в результате выполненных операций задние колеса тягача и колеса прицепа установились параллельно друг другу, после чего определяют перекос прицепа по отношению к линии MN.
Изобретение состоит в том, что на стенде с роликовыми опорами, на которые установлены колеса, приводят ролики во вращение и используют возникающие на колесах усилия вдоль осей роликов - не ограничивают перемещение колес вдоль осей роликов, на ролики устанавливают лишь задние колеса автомобиля, или тягача с прицепом, или колеса прицепа, вращают ролики в направлении, соответствующем прямому вращению колес, и после прекращения перемещения колес определяют соответственно или угол между продольной осью автомобиля или тягача и линией, перпендикулярной осям роликов, равный углу перекоса заднего моста, или перекос прицепа по отношению к этой линии, углы перекоса переднего моста автомобиля или тягача и моста прицепа определяют измерением расстояний с левой и правой сторон между центрами колес этих мостов и колес заднего моста автомобиля или тягача, что позволяет ускорить процесс измерения и использовать широко распространенные роликовые стенды без каких-либо изменений их конструкции. 2 с.п.ф-лы, 3 ил.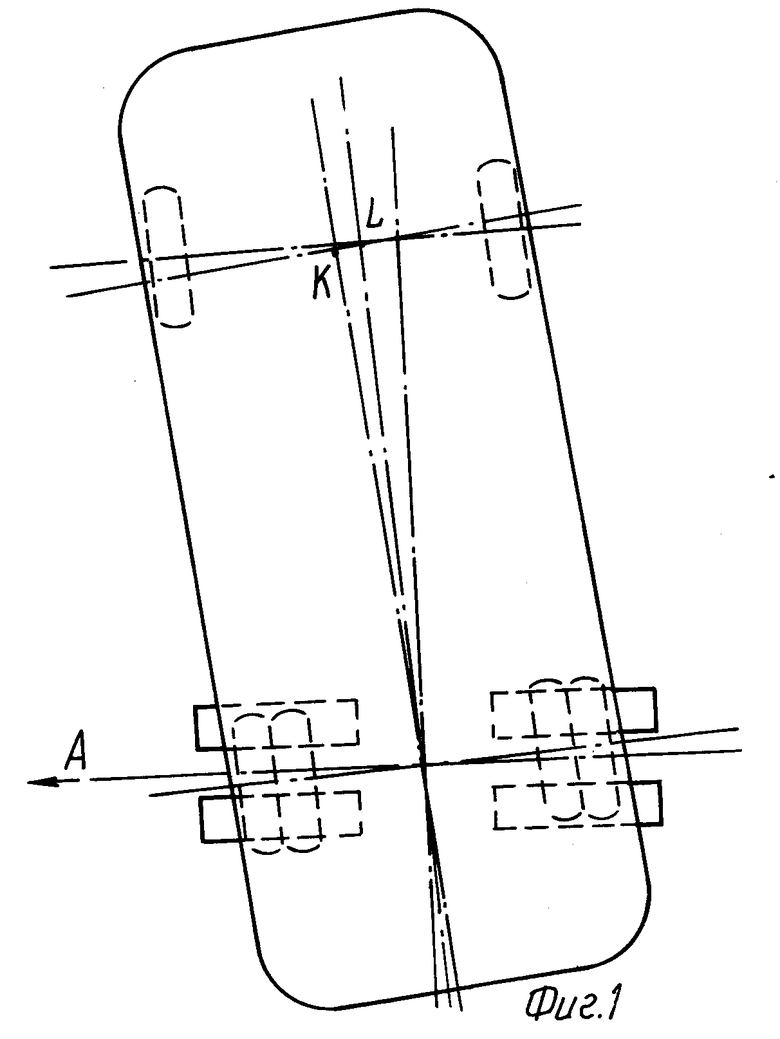
| Способ определения и регулирования положения колес автомобиля и устройство для его осуществления | 1988 |
|
SU1831671A3 |
| Способ определения смещений мостов транспортного средства | 1987 |
|
SU1427205A1 |
| Стенд для определения взаимного положения колес транспортного средства | 1987 |
|
SU1444642A1 |
| Устройство для определения смещений мостов транспортных средств | 1987 |
|
SU1422067A1 |
| Стенд для контроля ширины колеи и сходимости направляющих колес трактора | 1987 |
|
SU1418598A1 |
