Изобретение относится к автоматизации электроприводов конвейерных систем.
Известен электропривод конвейерны систем, содержащий асинхронный короткозамкнутый двигатель, генератор постоянного тока, тормоз, понижающую зубчатую передачу, тиристорный преобразователь и дифференциальньШ трехвапьный редуктор Tl1.
Недостатком Известного электропривода является громоздкость, так как он включает два вида электрических машин: асинхронный короткозамкнутый двигатель и генератор постоянного то ка, и сложную механическую передачу. Известен также привод крупных цепей, содержащий вал с редуктором, дифференциальную передачу с реверсивным вспомагательным двигателем,недомый вал и раму, а также реостат в цепи обмотки возбуждения вспомогателного двигателя, связанный с тягой рамы 2-3.
Однако данным приводом невозможно обеспечить вьфавнивание нагрузок двигателей при работе в системе конвейера.
Известен также электропривод конвейерных систем, содержащий последовательно соединенные источник питания, магнитный усилитель, датчик активной мощности, задатчик, асинхронный короткозамкнутый двигатель и рабочий механизм Гз.
Недостатками такого электропривода являются наличие дополнительного оборудования, в частности асинхронного короткоэамкнутого двигателя, генератора, а также наличие кабельных связей между асинхронными короткозамкнутыми двигателями.
Цель изобретения - повьшение надежности работы злектрЬйривода-.
. Поставленная цель достигается тем что электропривод конвейерных систем снабжен задатчиком и последовательно соединенными блоком нелинейности, блоком усиления и сумматором, причем вход блока нелинейности соединен с выходом датчика активной мощности, второй вход сумматора - с задатчиком, а выход сумматора - с магнитным усилителем.
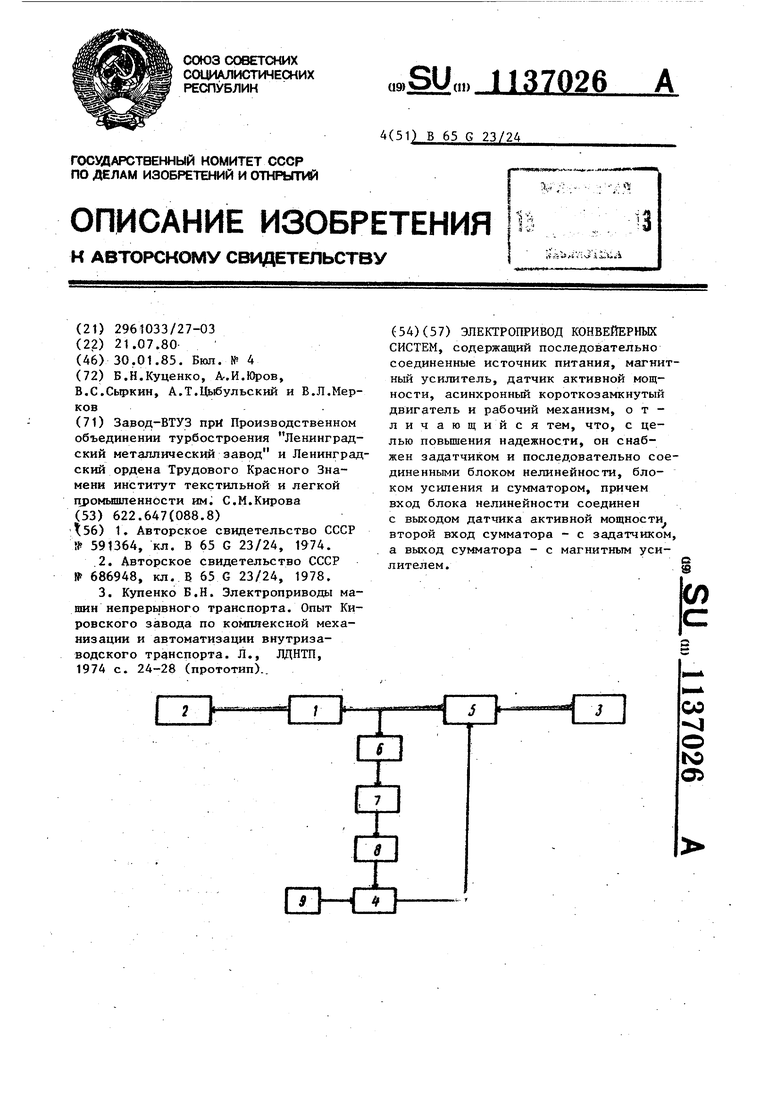
На чертеже приведена функциональная схема электропривода конвейерных систем.
Электропривод конвейерных систем состоит из асинхронного короткозамкнутого двигателя 1, рабочего механизма 2, источника питания 3, сумматора 4, магнитного усилителя 5, датчика активной мощности 6, блока нелинейности 7, блока усиления 8 и задатчика 9.
Рабочий механизм (например, конвейер) имеет в качестве привода ряд установленных .асинхронных короткозамкнутых двигателей 1, причем распределение нагрузки между ними носит случайный характер. Например, один двигатель может найти максимальную нагрузку, а другой может работать / практически на холостом ходу. Такому положению соответствует различный износ двигателей, что в целом, сказывается на надежности электропривода конвейерной системы. На асинхронный короткозамкнутый двигатель 2 подается напряжение через магнитный усилитель 5 от источника -питания 3, а его нагрузка измеряется д тчиком активной мощности 6. Сигнал от датчика активной мощности 6 подается на вход блока нелинейности 7.Блок нелинейности 7 может в общем случае. реализовать любой вид функциональной зависимости, в нашем случае кусочнолинейную аппроксимацгао с различными углами наклона активной мощности на различных участках. Сигнал от блока нелинейности 7 подается на блок усиления 8 и далее на сумматор 4, на который также подается сигнал от задатчика 9. С выхода сумматора 4 сигнал рассогласования подается на магнитньй усилитель 5, который управляет нагрузкой асинхронного короткозамкнутого двигателя 1. Обратная связь от датчика активной мощности 6, блока нелинейности 7 и блока усиления 8 позволяет при увеличении нагруз-ки асинхронного короткозамкиутоГо двигателя 1 уменьшить его нагрузку воздействием на магнитный усилитель 5 и тем сильнее, чем больше нагрузка асинхронного короткозамкнутого двигателя 1 (это зависит от выбранной характеристики нелинейного блока) . Наоборот, при уменьшении нагрузки асинхронного короткозамкнутого двигателя 1 с помощью обратной связи формируется управляющее воздейстг вие на магнитный усилитель 5 и тем
самым нагрузка восстанавливается до заданного значения.
Предлагаемый электролривод с обратной связью от датчика активной мощности блока нелинейности и блока усиления позволяет стабилизировать нагрузку асинхронных короткозамкнутых двигателей конвейерных систем, чем позволяет повысить надежность привода. Кроме того, при монтаже такого электропривода конвейерных систем экономится кабель, так как отпадает необходимость связей асинхронных короткозамкнутых двигателей между собой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1995 |
|
RU2123757C1 |
| Частотно-управляемый тяговый электропривод | 1984 |
|
SU1211843A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1996 |
|
RU2109397C1 |
| Электропривод | 1987 |
|
SU1515324A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Устройство частотного управления асинхронным электроприводом | 2017 |
|
RU2660460C1 |
ЭЛЕКТРОПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ, содержащий последовательно соединенные источник питания, магнитный усилитель, датчик активной мощности, асинхронный короткозамкнутый двигатель и рабочий механизм, отличающийся тем, что, с целью повышения надежности, он снабжен задатчиком и последовательно соединенными блоком нелинейности, блоком усиления и сумматором, причем вход блока нелинейности соединен с выходом датчика активной мощности второй вход сумматора - с задатчиком, а выход сумматора - с магнитным усилителем. (Л оо о ю о