Изобретение относится к устройствам для исследования физико-механических характеристик материалов (поверхностных слоев объектов) методом склерометрии, в частности для оценки трещиностойкости, прочности сцепления покрытия с основой и т.д.
Известно (описание микротвердомера ПМТ-3 в работе Григоровича В.К. "Твердость и микротвердость металлов", - М.: Наука, 1976, - 230 с., описание на стр. 120-123) устройство, позволяющее осуществлять склерометрические исследования при микронагрузках объекта, содержащее основание, установленный на нем объектный стол, узел нагружения (с постоянным усилием) объекта индентором (алмазной пирамидкой) посредством сменных грузов, оптическую систему визуального наблюдения результатов воздействия индентора на объект. Недостатком решения являются его ограниченные возможности (малое усилие нагружения, невозможность его изменения в процессе нагружения) и относительно невысокая точность исследований (субъективность оценки при визуальном наблюдении разрушений).
Наиболее близким по мнению заявителя по технической сущности и назначению к заявляемому объекту является (А.С. СССР N 1714443) решение, содержащее основание, объектный стол с возможностью перемещения относительно индентора, узел нагружения объекта индентором с постоянным усилием нагружения (посредством сменных грузов) и узел регистрации усилия царапания (скрайбирования). Недостатком являются ограниченные возможности (ступенчатая регулировка усилия нагружения, невозможность его изменения в процессе скрайбирования) и относительно невысокая точность исследований (оценивается только усилие царапания за счет использования механотронного датчика).
Задачей заявляемого изобретения является расширение возможностей прибора и повышение точности склерометрических исследований.
Технический результат, достигаемый в ходе решения задачи, состоит в повышении информативности получаемых результатов исследований.
Указанный технический результат достигается за счет обеспечения возможности управления (регулирования) усилия нагружения и глубины внедрения индентора, а также посредством использования сигналов акустической эмиссии в качестве носителя информации о разрушении исследуемого материала.
Таким образом, заявляемый объект, как и прототип, включает в себя основание, установленный на нем с возможностью перемещения объектный стол, узел нагружения объекта с индентором, узел регистрации усилия царапания. Однако, заявляемый объект отличается тем, что узел нагружения выполнен с возможностью изменения усилия нагружения за счет подключеного к магистрали пневмодвигателя поступательного перемещения индентора, а также дополнительно содержит приемник сигналов акустической эмиссии, возбуждаемой в процессе взаимодействия индентора с исследуемым объектом, взаимосвязанный с системой регистрации и анализа сигналов акустической эмиссии, узел контроля глубины внедрения индентора, блок управления пневмодвигателем узла нагружения, средство визуального контроля глубины внедрения, объектный стол для размещения исследуемого объекта выполнен в виде двухкоординатного поворотного измерительного стола и содержит указанный приемник сигналов и их предварительный усилитель, снабжен опрой для установки объекта, взаимодействующий с указанным приемником. При этом заявляемый объект имеет варианты исполнения, в частности узел нагружения выполнен в виде пневмодвигателя мембранного типа или в виде сильфона, узел контроля глубины внедрения индентора выполнен в виде индуктивного датчика линейных перемещений и взаимодействует через аналого- цифровой преобразователь с системой регистрации и анализа сигналов, узел регистрации усилия царапания выполнен взаимодействующим аналогично, блок управления пневмодвигателем дополнительно содержит устройство стабилизации, средство визуального контроля глубины внедрения индентора выполнено в виде индикатора, опора измерительного стола выполнена из материала объекта.
Указанные отличия являются новыми для склерометрических приборов и имеют существенные признаки изобретения.
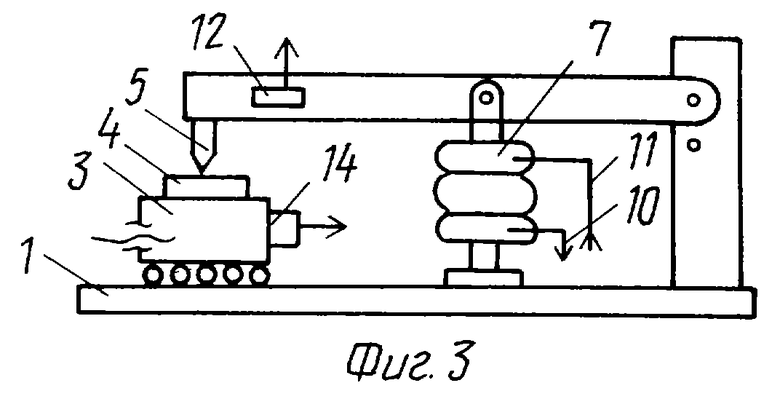
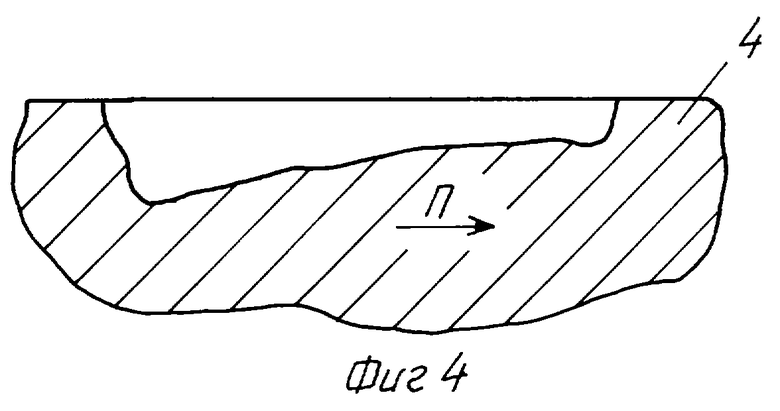
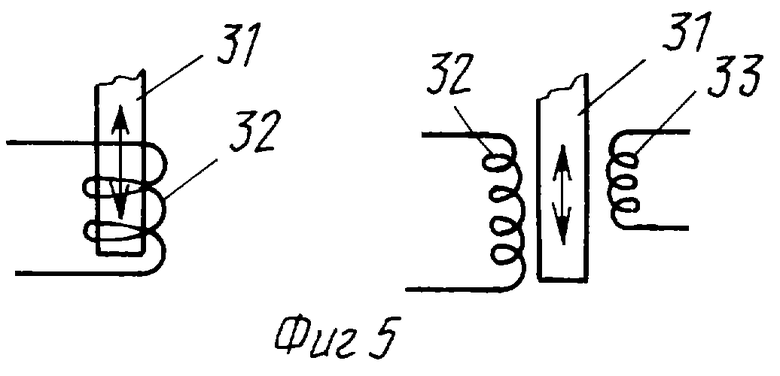
На фиг. 1 показана принципиальная схема прибора. На фиг.2 показана схема пневмосистемы прибора. На фиг. 3 показана схема прибора с использованием сильфона. На фиг.4 показана схема разрушения объекта при непрерывном вдавливании индентора во время перемещения объекта. На фиг. 5 показана схема узла контроля глубины внедрения индентора в виде индуктивного датчика. На фиг. 6 показана схема установки индикатора, на фиг. 7-10 - схемы измерительного стола, на фиг. 11 - схема установки устройства стабилизации, на фиг. 12 - схема многоканального ввода сигналов в АЦП, на фиг. 13 - характеристики цикла "нагружение-разгружение".
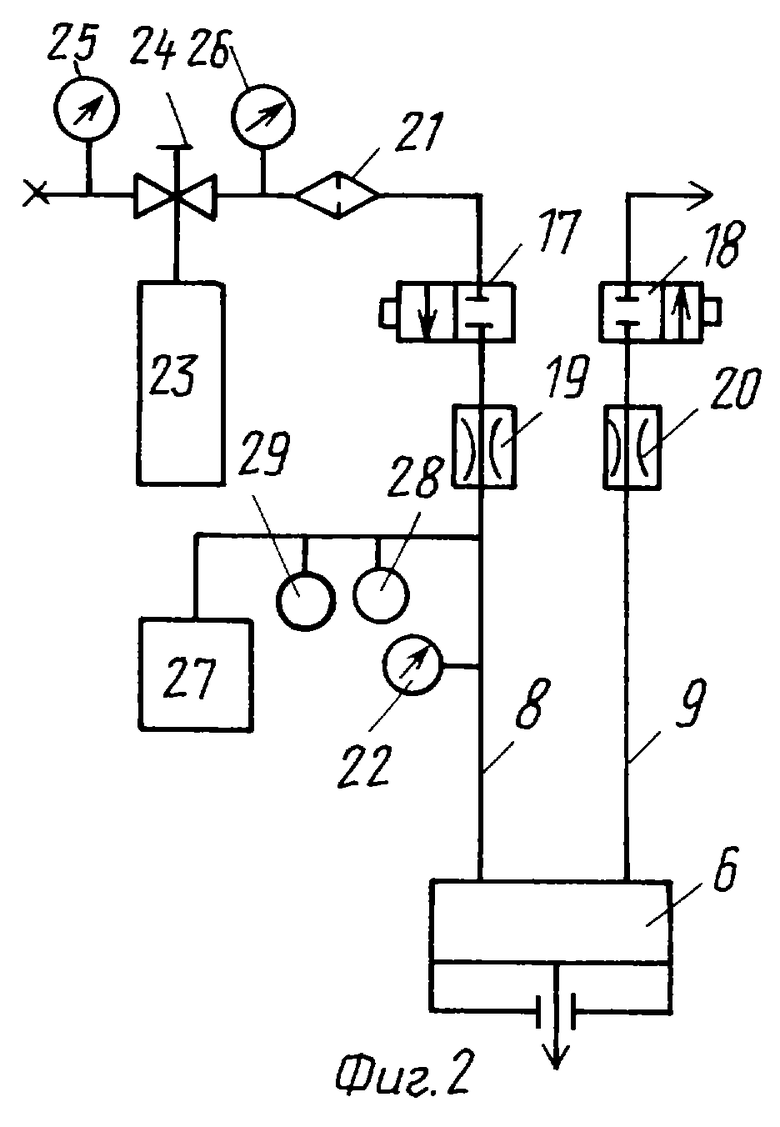
Заявляемый прибор для склерометрических исследований устроен следующим образом. На основании 1 с возможностью перемещения (например, с помощью электропривода 2) установлен объектный стол 3 с исследуемым объектом 4. Узел нагружения содержит индентор 5 и нагружающее устройство. Тип нагружающего устройства должен обеспечивать плавное перемещение (по фигуре сверху вниз) индентора с регулированием усилия. Приемлемо и целесообразно по кинетике нагружения использование в качестве нагружающего устройства пневмодвигателей поступательного перемещения. В силу того, что требуются незначительные длины перемещения (глубины внедрения индентора в исследуемый объект), приемлемо применение мембранного пневмоцилиндра 6 или сильфона 7. Соответственно пневмоцилиндр 6 подключен к магистрали нагнетания 8 и выпуска 9 воздуха, сильфон - к вакуумной магистрали 10 откачки и впуска воздуха 11. Прибор снабжен узлом регистрации усилия царапания (и в том числе усилия внедрения индентора), состоящим, например, из тензометрического моста 12 и регистрирующего прибора 13. Объектный стол 3 снабжен датчиком 14 сигналов акустической эмиссии, возбуждаемой в объекте 4 при нагружении объекта 4 индентором 5. Датчик 14 взаимодействует через тракт 15 усиления (ТУ) сигналов с системой 16 регистрации и анализа сигналов (СКАС). Блок управления работой пневмодвигателя предусматривает стандартную элементную базу. Для примера использования в приборе мембранного пневмоцилиндра 6 блок управления может состоять из клапана 17 нагружения, клапана 18 разгружения, дросселей 19 и 20 впускного и выпускного, фильтра 21 и контрольного манометра 22. Подача воздуха может производиться из сети или баллона 23. Для этого служит вентиль-редуктор 24 и манометры 25, 26. Для стабилизации давления воздуха может быть встроен ресивер 27. Для облегчения условий работы - сигнализатор 28 и датчик 29 давления.
На примере использования пневмоцилиндра 6 работа прибора состоит в следующем. Исследуемый объект 4 устанавливают и закрепляют на объектном столе 3. Открывают вентиль-редуктор 24, клапан 17 открывают, клапан 18 закрывают. Через дроссель 19 подают давление в магистраль нагнетания 8, рабочую полость пневмоцилиндра 6, ресивер 27. При достижении некоторого давления в пневмоцилиндре 6 его рабочий шток (мембрана со штоком) начинает перемещаться, перемещает держатель 30 индентора, индентор с некоторой скоростью перемещается к объекту 4 и достигает его поверхности. При дальнейшем росте давления индентор деформирует объект, возникает акустическая эмиссия, ее сигналы воспринимаются датчиком 14, усиливаются в тракте усиления 15 и подаются в СКАС. При этом деформацией держателя 30 регистрируется усилие нагружения за счет чувствительных элементов 12 и прибора 13. Имея тарировку этого усилия нагружения, судят о глубине внедрения индентора в объект. При достижении требуемой глубины внедрения (усилия нагружения) настраивают датчик 29 на ту величину давления, которая сейчас имеется в пневмоцилиндре 6 и магистрали 8 нагнетания. При этом срабатывает (загорается лампа) сигнализатор 28 давления (и может закрываться клапан 17). Включают перемещение П объектного стола. Индентор 5 царапает (скрайбирует, деформирует, разрушает) объект, соответствующие сигналы АЭ регистрируются и анализируются в САКС. Усилие царапания (тангенциальная сила) может регистрироваться специальным узлом регистрации (непоказан) либо тем же тензометрическим мостом 12 (по предварительной тарировке). О скачках усилия нагружения (глубины внедрения индентора) при перемещении П объекта информирует узел 12, 13, манометр 22, сигнализатор 28. Заканчивают перемещение объекта, открывают клапан 18 разгружения и дросселем 20 выпускают воздух в атмосферу. Индентор перемещается (по фигуре вверх) и выходит из взаимодействия с объектом. Полученные сигналы АЭ подвергают анализу и судят о свойствах исследуемого объекта или его материала.
При необходимости время нагружения, перемещения, разгрузки можно синхронизировать по показаниям приборов, получить соответствующие графики, что облегчает анализ.
При использовании сильфона 7 работа прибора аналогична, но работа блока управления будет состоять в обеспечении необходимого разрежения (вакуума) в сильфоне.
Другой режим нагружения исследуемого объекта может быть осуществлен при изменении усилия нагружения во время перемещения П объекта. На примере использования пневмоцилиндра 6 это делают следующим образом. Пусть требуется по мере перемещения увеличивать усилие нагружения (глубину внедрения индентора). В этом случае клапан 17 не закрывают. Следовательно давление в пневмоцилиндре 6 продолжает расти, усилие нагружения и глубина внедрения возрастают. Скоростью роста глубины внедрения управляют за счет изменения проходного сечения дросселя 19. Пусть требуется по мере перемещения уменьшать усилие нагружения (глубину внедрения). При закрытом клапане 17 открывают клапан 18 и пускают воздух из рабочей полости пневмоцилиндра на сброс. Скоростью уменьшения усилия нагружения управляют с помощью дросселя 20.
Понятно, что управлять скоростями внедрения либо вывода индентора можно за счет одновременного управления давления воздуха на входе в пневмоцилиндр и на выходе, т.е. за счет 17, 19, 18, 20. Понятно также, что блок управления позволяет изменять глубину внедрения индентора ступенчато в процессе перемещения объекта.
Для проведения следующего испытания на этом же объекте (т.к. на другом локальном участке исследуемой поверхности объекта) объект необходимо сместить относительно индентора (влево, вправо, вперед, назад, повернуть под некоторым углом по отношению к предыдущему следу скрайбирования). Для этого объектный стол выполнен в виде двухкоординатного (с перемещением в двух взаимно перпендикулярных горизонтальных направлениях) поворотного (вокруг вертикальной оси) измерительного (с системой отсчета величин смещения и поворота) стола. Конструкции таких столов известны, например конструкция с перемещением двух кареток по соответствующим направляющим с помощью микрометрических винтов с лимбами на поворотной (с лимбом) платформе.
В описанном выше устройстве прибора точность контроля глубины внедрения не может быть высокой. Ее можно повысить за счет оснащения прибора специальным (емкостным, индуктивным, пневматическим и т.д.) узлом контроля линейных перемещений. Применение любого типа узла имеет свои достоинства и недостатки. При потребных величинах перемещений (глубинах внедрения) приемлем узел контроля в виде индуктивного датчика. Так, при перемещении стержня 31 вдоль катушки 32 в ней наводится индукция. Ее величина пропорциональна перемещению стержня. Стержень можно выполнить взаимодействующим (на штанге и т.д.) с индентором, катушку - со столом (основанием, объектом и т.д.). Или наоборот. Подача воздуха в пневмоцилиндр 6 приведет к перемещению индентора 5 и соответственно стержня 31 относительно объекта 4 и соответственно катушки 32. Изменение индуктивности необходимо регистрировать и (по результатам предварительной тарировки) переводить в длину перемещения (глубину внедрения). При использованных глубинах (5-500 мкм) внедрения это удавалось.
В частности, катушек может быть несколько, одна (32) для грубого контроля, вторая (33) - для тонкого контроля. В данных случаях элементы 12 и 13 будут являться узлом регистрации только усилия царапания.
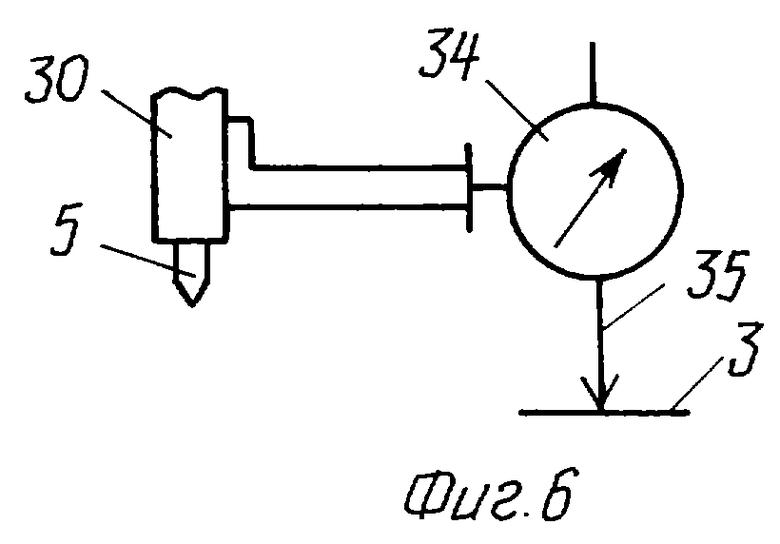
В описанном приборе подвод индентора к объекту трудоемок и длителен, т. к. существует опасность удара индентором объекта при большой скорости подвода индентора. Это (особенно при повторных подводах для повторных нагружений) можно исправить, введя в узел контроля глубины внедрения (длины перемещения из исходного состояния) индентора средство визуального контроля положения вершины индентора. Это могут быть специальные средства (оптические, сигнальные) или стандартные, например прибор индикаторного (индикатор стрелочного типа) типа. Для этого корпус 34 индикатора крепят на держатель 30 индентора (или другой элемент узла нагружения), ножку 35 индентора опирают на поверхность стола 3 (объекта, основания и т.д.). Или наоборот. Такое средство визуального контроля перемещения создает удобства в работе.
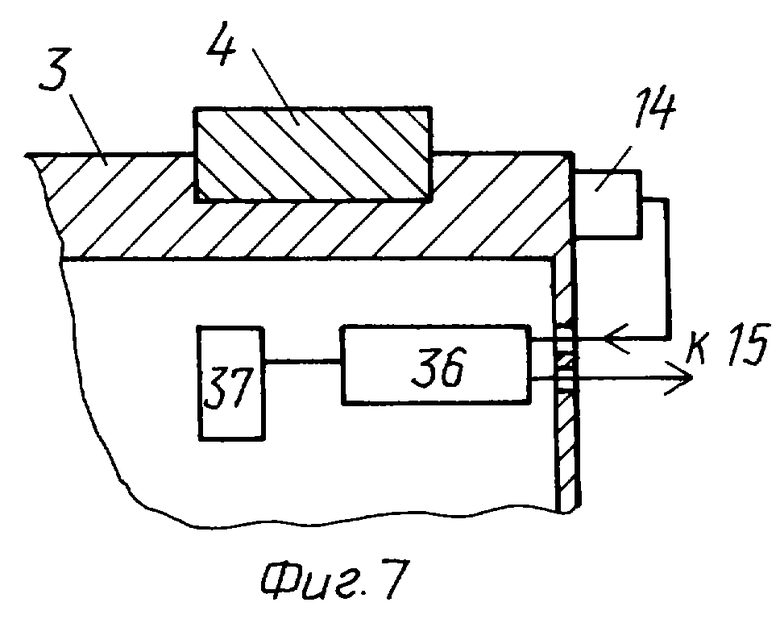
В описанном приборе точность исследований относительно невысока из-за потерь сигналов акустической эмиссии при их передаче от датчика к остальной аппаратуре, в том числе из-за потерь в тракте 15 усиления. Эти потери можно сократить, если сигналы сразу у датчика предварительно усилить и затем передать в тракт 15 (или сразу в САКС 16), т.е. произвести предварительное усиление сигналов при использовании коротких трасс провода сигналов. Для этого предварительный усилитель 36 и питающий его источник питания 37 (аккумулятор) должны находиться вблизи датчика 14. Они будут мешать доступу к объекту и его наблюдению. Их можно убрать в объектный стол 3. Таким образом объектный стол 3 выполнен в виде измерительного стола, содержащего датчик 14 с предусилителем 36 (и источником 37 питания). Работа прибора с таким измерительным столом аналогична.
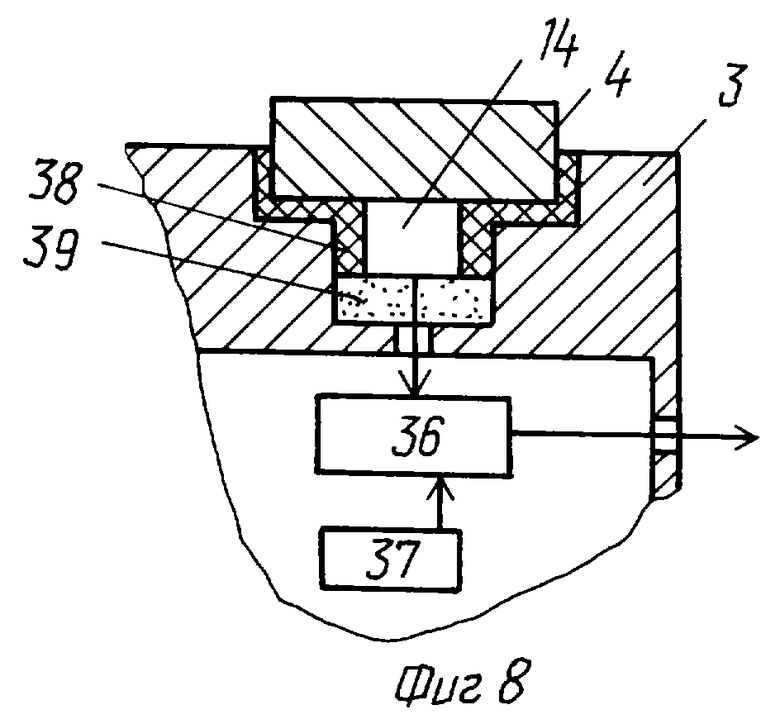
Но в этом случае акустическая эмиссия (волны напряжений деформации) от объекта 3 искажается по пути к датчику 14 материалом стола 3. Это можно исключить, разместив датчик 14 внутри измерительного стола с обеспечением контакта с объектом. При этом помехи и наводки от стола к датчику можно отсечь за счет прокладок 38 из акустикоизоляционного материала, помещаемых между столом 3, объектом 4 и датчиком 14. Датчик 14 к объекту 4 может крепиться (клеиться) или прижиматься упругим акустикоизоляционным элементом 39. Работа прибора аналогична.
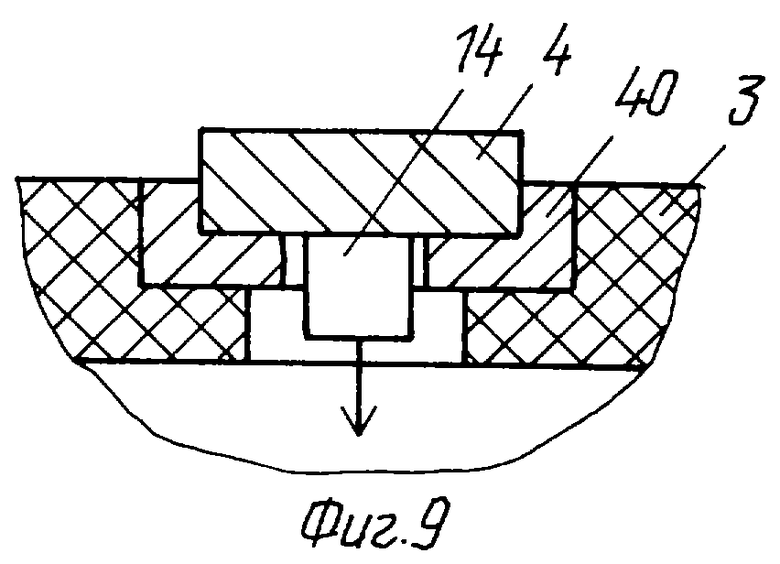
При значительных усилиях нагружения прокладки 38 могут деформироваться, что повлечет изменение глубины внедрения. Это исключается при установке объекта 4 на опору 40, монтируемую в корпусе измерительного стола. В этом случае ничего не мешает корпус стола выполнить прочным из акустикоизоляционного материала. Точность контроля сигналов АЭ возрастет. Работа прибора аналогична.
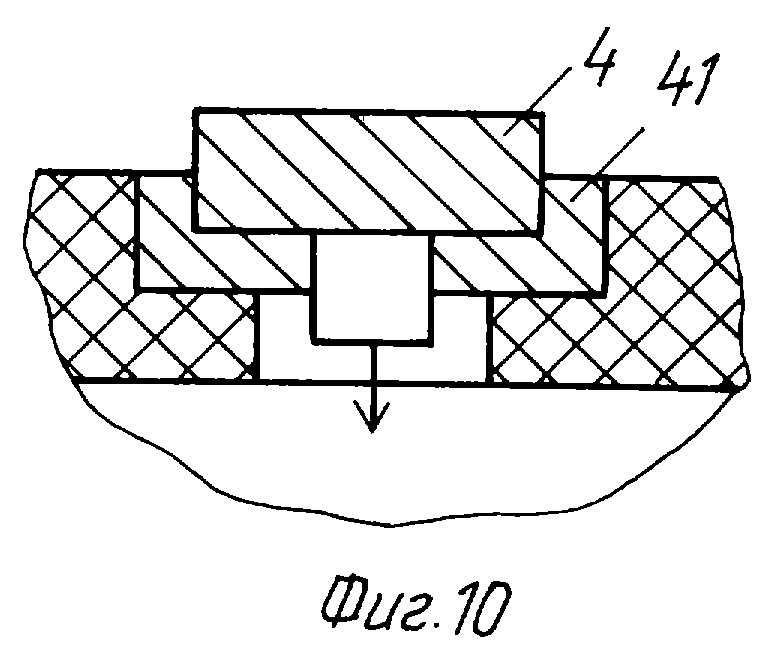
Еще меньших потерь и искажений сигналов АЭ можно добиться при исполнении опоры 41 из того же материала, из которого выполнен исследуемый объект (или его основа). Это оказалось полезным при исследовании трещиностойкости и качества сцепления покрытия с основой твердосплавных пластин металлорежущего инструмента.
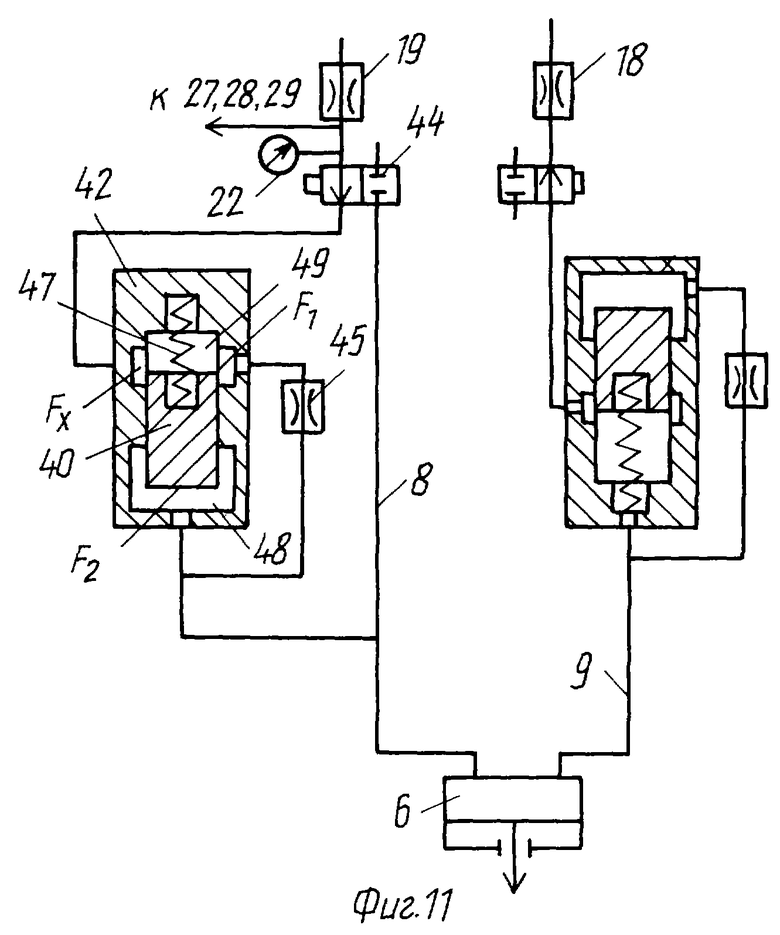
При тонких исследованиях имеют место ситуации, когда необходимо выдерживать глубину внедрения индентора строго постоянной. Этому препятствует разнородность свойств (микротвердость включений, структура и т.д.) материала объекта, в результате чего индентор все таки совершает некоторые вынужденные перемещения и, тем самым, изменяет глубину внедрения. Эти погрешности (изменения) глубины внедрения можно существенно снизить за счет обеспечения стабилизации давления (точнее сказать, за счет обеспечения перетока воздуха) в магистрали 8 нагнетания либо в магистрали 9 сброса, т.е. путем снижения "податливости" пневмосистемы при изменении сил, действующих со стороны объекта на индентор. Для этого прибор можно оснастить устройством стабилизации "на входе" 42 или "на выходе" 43. Устройство стабилизации содержит золотник 42 (типа Г-55.1, Г-55.2 и т.д.), дополнительный клапан 44, дроссель 45. Золотник состоит из корпуса 42 и поршня 46, подпружиненного пружиной 47. Давление в магистрали действует на его площади F1 и F2. Усилие пружины 47 и воздействие давления на F1 компенсируется воздействием давления на F2 так, что проходное сечение Fx золотника открыто. Дросселем 45 регулируют задержку времени выравнивания давления в полостях 48 и 49 (задержка тем больше, чем меньше щель в дросселе). Работает прибор следующим образом. При достижении требуемой глубины внедрения индентора клапаны 17 и 18 закрывают. Включают перемещение объектного (измерительного) стола, происходит царапание объекта на заданной глубине. В рабочей камере пневмоцидлиндра 6 давление имеет некоторое значение P1. Оно является таким же в магистрали 8, полостях 48, 49 и ресивере 27. Пусть в объекте под индентор попала твердая частица материала объекта. Сила трения возрастает. Это ведет к перемещению индентора и держателя (вверх по фиг. 11). Давление в пневмоцилиндре 6 возросло до P2. Оно также возросло в полости 48. В полости 49 оно еще остается равным P1 (достижению P2 препятствует дроссель 45). В результате поршень 46 сместится (вверх), перекроет щель Fx (уменьшит ее) и предотвратит переток воздуха в ресивер. Закрытие щели Fx повысит "сопротивляемость" пневмосистемы, поршень 6 остановится, изменение глубины внедрения прекратится. Без стабилизации воздух из пневмоцилиндра вытеснялся бы в ресивер или магистраль, т.е. изменения были бы существеннее. При попадании под индентор "мягкого" участка (поры, трещины) в материале объекта давление в пневмоцилиндре 6 наоборот уменьшится, поршень под действием пружины 47 и давления P в полости 49 сместится (вниз) и увеличит щель Fx, обеспечив переток воздуха из ресивера в рабочую полость пневмоцилиндра.
Работа прибора при установке устройства 43 стабилизации "на выходе" аналогична.
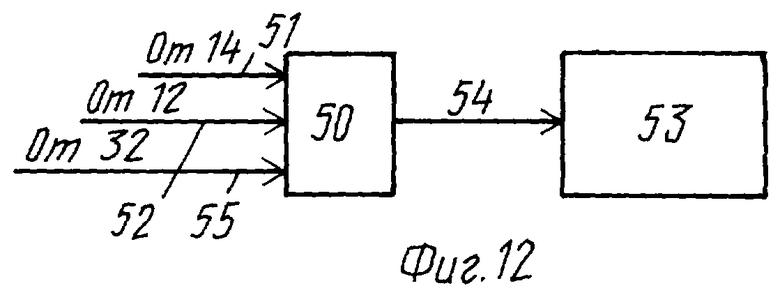
Для обеспечения синхронизации контроля нескольких параметров исследования одновременно (сигналов АЭ, усилия царапания, глубины внедрения и т.д.) управление СКАС сложно. Это можно облегчить за счет обеспечения нескольких каналов потока информации на несколько самостоятельных приборов или один общий (например, на программируемую ЭВМ). Тогда удобнее, чтобы на прибор поступала информация, прошедшая аналого-цифровое преобразование. При таком подходе аналого-цифровой преобразователь 50 будет иметь основной канал 51 ввода сигналов АЭ от датчика 14, дополнительный канал 52 ввода сигналов от тензометрического моста 12 по усилию царапания. Таким образом, в приборе узел регистрации усилия царапания выполнен взаимосвязанным с СКАС через дополнительный канал. Сбор информации с АЦП в ЭВМ 53 происходит по шине данных (их может быть несколько).
Таким же образом для той же цели узел контроля глубины внедрения индентора в приборе может быть выполнен взаимодействующим с СКАС через еще один дополнительный канал 55 АЦП, ввод сигналов на который осуществляется с катушки 32 (или 33), а также с любого другого элемента, контролирующего глубину внедрения (с золотника 42, с датчика 29 давления).
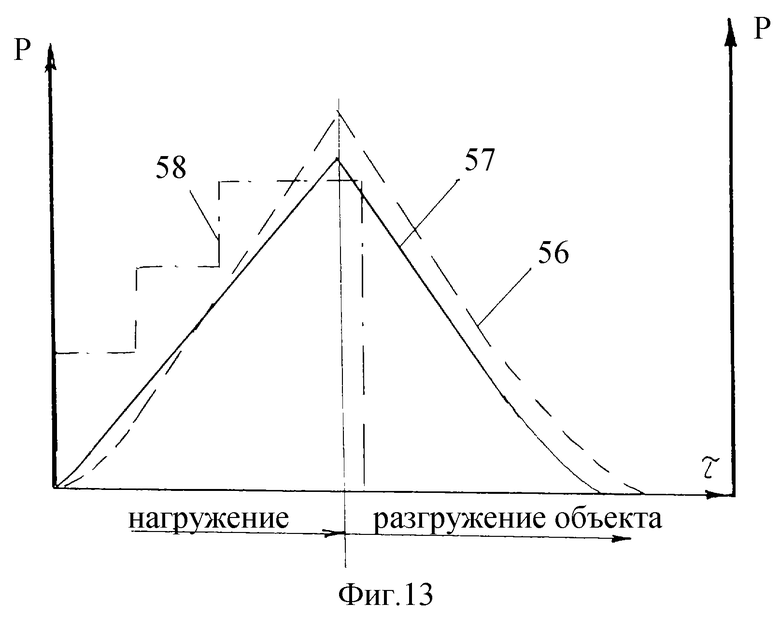
В рамках заявки на изобретение нет возможности привести подтверждение повышения точности исследования по всем предложенным решениям. Рассмотрим лишь пневматическую характеристику 56 цикла нагружения-разгружения (изменение давления P во времени при внедрении индентора без перемещения объекта и при выводе индентора) и силовую (нагрузочную) характеристику 57 прибора (изменение усилия нагружения объекта в тот же интервал времени). Из их сравнения видно, что нагружение имеет линейный характер, что важно. Разгружение близко к линейному характеру. Тот же цикл нагружения-разгружения с помощью сменных грузов (кривая 58), как это выполняется в рассмотренных решениях, не дает жесткой характеристики цикла.
Описание устройства и работы прибора показывают, что поставленная задача решена, технический результат достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ | 1998 |
|
RU2147737C1 |
| СПОСОБ ИССЛЕДОВАНИЯ СВОЙСТВ МАТЕРИАЛА ИЗДЕЛИЙ | 1998 |
|
RU2140075C1 |
| СПОСОБ АКУСТИЧЕСКОГО КОНТРОЛЯ ТРЕЩИНОСТОЙКОСТИ ИЗДЕЛИЙ | 1998 |
|
RU2140076C1 |
| СПОСОБ КОНТРОЛЯ СВОЙСТВ И ДИАГНОСТИКИ РАЗРУШЕНИЯ ИЗДЕЛИЙ | 1998 |
|
RU2138039C1 |
| СПОСОБ КОНТРОЛЯ ФИЗИКО-МЕХАНИЧЕСКИХ СВОЙСТВ ИЗДЕЛИЙ | 1998 |
|
RU2138038C1 |
| СПОСОБ ОЦЕНКИ КАЧЕСТВА СЦЕПЛЕНИЯ ПОКРЫТИЯ С ОСНОВОЙ | 1996 |
|
RU2117930C1 |
| СПОСОБ РАЗРУШЕНИЯ ЛЕДЯНОГО ПОКРОВА | 1996 |
|
RU2123662C1 |
| ПОДВОДНОЕ ЛЕДОКОЛЬНОЕ СУДНО | 1997 |
|
RU2123450C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ НЕПРЕРЫВНОЛИТЫХ ДЕФОРМИРОВАННЫХ ЦИЛИНДРИЧЕСКИХ ЗАГОТОВОК | 1999 |
|
RU2176173C2 |
| СПОСОБ ВЫПЛАВЛЕНИЯ МОДЕЛЕЙ ИЗ ОБОЛОЧКОВЫХ ФОРМ | 1996 |
|
RU2116157C1 |
Изобретение относится к определению физико-механических характеристик материалов, в частности поверхностных слоев объектов методом склерометрии для оценки трещиностойкости, прочности сцепления покрытия с основой и т.д. Прибор для склерометрических исследований материалов включает в себя объектный стол, узел нагружения с индентором, выполненный с возможностью изменения усилия нагружения, и систему регистрации усилия царапания, а также прибор дополнительно содержит систему регистрации сигналов акустической эмиссии, узел контроля глубины внедрения индентора, блок управления пневмодвигателем узла нагружения, средство визуального контроля глубины внедрения индентора. Технический результат состоит в повышении точности получаемой информации о свойствах материала и повышении информативности регистрируемых параметров разрушения материала. 1 с. и 8 з.п.ф-ыл, 13 ил.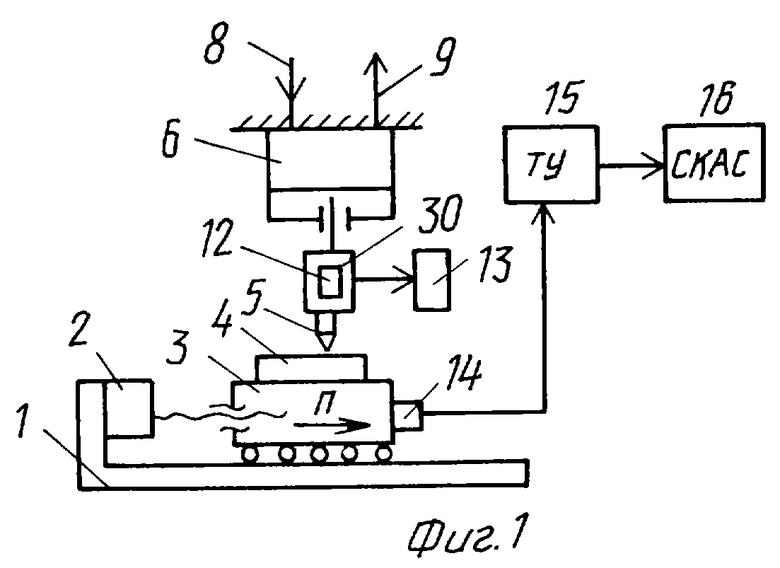
| Прибор для склерометрических исследований | 1988 |
|
SU1714443A1 |
| Твердомер | 1982 |
|
SU1027583A1 |
| Устройство для измерения микро-ТВЕРдОСТи МАТЕРиАлОВ | 1978 |
|
SU836566A1 |
| СКЛЕРОМЕТР | 1991 |
|
RU2049326C1 |
| Устройство для отрезки мерных заготовок | 1959 |
|
SU130326A1 |
| US 4036048 A, 19.07.1977. | |||
