Изобретение относится к области автомагического управления, а именно к реализации трехпозиционных регуляторов с адаптивной средней позицией.
Известен способ (см. , например, А.А. Кампе-Немм. Автоматическое двухпозиционное регулирование. М. : Наука, 1967, с.58-70) реализации трехпозиционного регулятора, основанный на фиксированном задании его зоны нечувствительности и регулирующих сигналов, соответствующих крайним и средней позициям. Такой способ, хотя и прост при технической реализации, однако регулятор, реализованный по нему, не обеспечивает в системе регулирования требуемого качества, особенно при возмущениях, например по нагрузке на объект.
Другим способом реализации является способ, описанный в соответствии с рис. 1 в статье авторов Магергут В.З., Егоров А.Ф., Вент ДП. Адаптивные позиционные регуляторы и перспективы их применения. //Приборы и системы управления, 11, 1998, с.53-56 (прототип). Согласно ему при переключении регулятора на крайнюю позицию или при выбеге регулируемой величины за зону нечувствительности регулятора одновременно с воздействием на объект сигналом крайней позиции включается в работу устройство управления, включающее, в свою очередь, посредством контактов в работу функциональное звено перенастройки (ФЗП) средней позиции регулятора. При вхождении регулируемой величины в зону и отключении на объект воздействия сигналом крайней позиции то же устройство управления подключает сформированный в ФЗП сигнал средней позиции для воздействия на объект. Иначе, в способе-прототипе реализация адаптивного трехпозиционного регулятора предусматривает поочередное воздействие на объект то сигналом крайней позиции, то адаптивной средней, формируемой в ФЗП в период воздействия на объект крайней позиции, посредством устройства управления, переключающего соответствующие контакты подключения того или иного управляющего сигнала на объект и подключение ФЗП для формирования в нем сигнала адаптивной средней позиции.
В частном случае в качестве устройства управления могут выступать пороговые устройства переключения позиций регулятора, т.е. устройства переключения сигнала средней позиции на сигнал одной из крайних при выходе регулируемой величины из зоны нечувствительности или наоборот сигналов крайних на среднюю при вхождении регулируемой величины в зону.
Таким образом, в способе-прототипе наряду с переключением сигналов позиций, воздействующих на объект управления, при выбеге (или вхождении) регулируемой величины из зоны (в зону) нечувствительности имеют место и другие переключения, выполняемые устройством управления, обеспечивающие подключение ФЗП на выполнение своей функции по формированию сигнала адаптивной средней позиции или подключение этого сигнала для воздействия на объект. Все это усложняет реализацию адаптивного трехпозиционного регулятора и делает конструкцию менее надежной из-за наличия контактных устройств и переключений.
Предлагается способ, позволяющий реализовать адаптацию средней позиции трехпозиционного регулятора без использования дополнительных контактных устройств для подключения ФЗП путем определенного его подсоединения на выход трехпозиционного регулятора с фиксированными позициями и зоной нечувствительности параллельно со звеном с коэффициентом усиления, равным или большим двух (К≥2), суммирования сигналов этих двух параллельных ветвей и подачи результирующего сигнала на звено типа насыщения с единичным коэффициентом усиления и заданными значениями сигналов насыщения. Такая реализация регулятора без использования дополнительных контактных устройств повышает надежность его работы.
Блок-схема устройства, реализованного в соответствии с предлагаемым способом, показана на чертеже. На схеме цифрами обозначены: 1 - элемент сравнения, 2 - пороговые устройства переключения позиций, 3 - трехпозиционный регулятор с фиксированными позициями и зоной нечувствительности, 4 - алгебраический сумматор, 5 - усилительное звено с коэффициентом усиления, равным или большим двух (К≥2); 6 - функциональное звено перенастройки (ФЗП); 7 - звено памяти (П) сигнала ФЗП; 8, 10 - сумматоры; 9 - звено типа насыщения.
Элемент сравнения 1 предназначен для сравнения сигналов задания зоны нечувствительности у1 и у2 с сигналом y регулируемой величины.
Пороговые устройства 2 обеспечивают пороговые (скачкообразные) изменения сигналов, соответствующих позициям регулятора, причем значения сигналов крайних позиций - верхней Uв нижней Uн имеют равные по модулю значения |ΔUl| относительно сигнала средней позиции Ucp. Переключение сигналов позиций с нижней на среднюю и со средней на верхнюю или наоборот происходит при достижении регулируемой величиной у соответствующих сигналов заданий зоны у1 или у2, т. е. при вхождении (или выбеге) регулируемой величины в зону (из зоны) нечувствительности Δу = у2 - у1, которая также является фиксированной. Выходным сигналом U1 пороговых устройств 2 является один из сигналов позиций Uв, Ucp или Uн.
Элемент сравнения 1 совместно с пороговыми устройствами 2 образуют трехпозиционный регулятор 3 с фиксированными позициями - нижней, средней, верхней и зоной нечувствительности Δу, на выходе которого при достижении сигналом регулируемой величины у сигналов задания зоны нечувствительности у1 и у2 появляются сигналы соответствующих позиций Uн, Ucp или Uв.
На положительный вход алгебраического сумматора 4 подается выходной сигнал U1 трехпозиционного регулятора 3, а на отрицательный - опорный сигнал, равный значению сигнала средней позиции Ucp трехпозиционного регулятора 3. Выходной сигнал Δ алгебраического сумматора 4, равный нулю при U1 = Uср или ±ΔU1 при U1 = Uв или U1 = Uн подается одновременно на усилительное звено 5 с К≥2 и ФЗП 6.
ФЗП, как и в способе-прототипе выбирается в зависимости от желаемого вида реализации адаптации средней позиции: дискретного или аналогового. Так, при аналоговой реализации ФЗП в качестве него берется, например, интегрирующее звено с передаточной функцией
где Ти - время интегрирования - параметр настройки ФЗП, р - оператор Лапласа, реализующее линейное изменение адаптивной средней позиции в соответствии с уравнением
или апериодическое первого порядка с
где Та - постоянная времени звена - также параметр настройки ФЗП, реализующего экспоненциальное изменение адаптивной средней позиции в соответствии с уравнением
где в (2), (4) ϑ - время нахождения (выбега) регулируемой величины вне (из) зоны нечувствительности Δy, а Δ = Ul-Ucp.
При дискретном выборе реализации адаптивной средней позиции на выходе ФЗП сигнал g2 изменяется скачком на какую-то величину Δg2.
Последовательно с ФЗП в случае его реализации в виде апериодического звена первого порядка включается звено памяти 7 запоминания сигнала ФЗП, имеющего место в моменты переключения входного сигнала на ФЗП с сигнала крайней позиции на среднюю, т.е. в моменты появления сигнала Δ = 0. Такое звено памяти (П) удерживает значение сигнала ФЗП, соответствующего значению вновь сформированного сигнала адаптивной средней позиции, при вхождении регулируемой величины у в зону нечувствительности Δу и переключении регулятора 3 на среднюю позицию. При реализации ФЗП в виде интегрирующего звена необходимость в звене памяти 7 отпадает, так как при переключении регулятора 3 на среднюю позицию сигнал Δ = 0 и сигнал в соответствии с (2) перестает изменяться, т. е. запоминается. То же происходит и при дискретном изменении сигнала в ФЗП, так как такое запоминание происходит путем конструктивного выполнения ФЗП.
Сигналы после усилительного звена 5-g1 и после ФЗП 6 и звена памяти 7-g2 суммируются на сумматоре 8 и подаются на элемент насыщения 9, который конструктивно может быть выполнен в виде двух последовательно соединенных ограничителей сигналов, один из которых настроен на ограничение сигнала по минимуму, а другой - по максимуму, причем значения этих ограничений соответствуют значениям |ΔUl|. Сигнал на выходе элемента насыщения 9 в точности соответствует сигналам крайних позиций регулятора 3 относительно сигнала его средней позиции Uср при нахождении регулируемой величины у вне его зоны нечувствительности Δу и сигналу адаптивной средней позиции, обеспечиваемой ФЗП, при нахождении регулируемой величины в зоне регулятора 3. При этом никаких контактных устройств подключения ФЗП схема не содержит.
Для перехода к реальным сигналам, воздействующим на объект управления - U3, сигнал с выхода звена насыщения 9 U3 суммируется на сумматоре 10 с сигналом Ucp, т.е. U3=U2+Ucp.
Таким образом, предлагаемый способ реализации трехпозиционного регулятора позволяет в точности повторить работу адаптивного трехпозиционного регулятора, реализованного в соответствии со способом прототипа, однако без использования контактных элементов подключения ФЗП, что повышает надежность работы регулятора по предлагаемому способу. Кроме того, такой способ целесообразно применять для преобразования традиционного трехпозиционного регулятора с фиксированными позициями в адаптивный с адаптивной средней позицией путем подключения к выходу традиционного трехпозиционного регулятора приставки, содержащей звенья 4-10 в соответствии с чертежом.
Такое преобразование окажется существенно более простым в сравнении с аналогичным преобразованием по способу-прототипу, когда придется подключаться внутрь схемы традиционного трехпозиционного регулятора.
Отметим также, что в случае нулевого сигнала средней позиции трехпозиционного регулятора Ucp=0 сигнал выхода последнего можно непосредственно подавать на параллельно включенное усилительное звено 5 с К≥2 и ФЗП 6 с последовательно соединенным с ним звеном памяти (П) 7, т.е. исключить из цепочки передачи сигналов на чертеже алгебраический сумматор 4, а также за выходной сигнал предлагаемого регулятора брать сигнал U2 с выхода звена типа насыщения 9, т.е. исключить из схемы также и последний сумматор 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕАЛИЗАЦИИ ДВУХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2007 |
|
RU2362198C1 |
| НЕЧЕТКИЙ АДАПТИВНЫЙ ПОЗИЦИОННЫЙ СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ С ДИСКРЕТНЫМИ ИСПОЛНИТЕЛЬНЫМИ УСТРОЙСТВАМИ | 2013 |
|
RU2514127C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОДАВЛЕНИЯ ВИБРАЦИИ ПОМОЛЬНО-СМЕСИТЕЛЬНОГО АГРЕГАТА | 2014 |
|
RU2567158C1 |
| СПОСОБ АДАПТИВНОГО ТРЕХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2474856C1 |
| Многопараметрический нечеткий процессор для автоматических регуляторов и способ синтеза управляющего сигнала | 2017 |
|
RU2649791C1 |
| АДАПТИВНАЯ ПРИСТАВКА К ДВУХПОЗИЦИОННОМУ РЕГУЛЯТОРУ | 2010 |
|
RU2424545C1 |
| АДАПТИВНЫЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 2010 |
|
RU2408913C1 |
| СПОСОБ КАСКАДНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2127895C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Способ автоматического трехпозиционного регулирования | 1972 |
|
SU458812A1 |
Изобретение относится к автоматическому управлению, а именно к реализации трехпозиционных регуляторов с адаптивной средней позицией, и может быть использовано как при автоматизации промышленных объектов, так и объектов бытовой техники для автоматического регулирования в них тех или иных технологических величин. Технический результат - повышение надежности работы регулятора и упрощение преобразования традиционного трехпозиционного регулятора с фиксированными позициями в регулятор с адаптивной средней позицией. Бесконтактность подключения функционального звена перенастройки достигается его подключением на выход трехпозиционного регулятора с фиксированными позициями параллельно с усилительным звеном с коэффициентом усиления К≥2 и последующей подачей суммарного сигнала этих двух параллельных ветвей на звено типа насыщения с единичным коэффициентом усиления и значениями сигналов насыщения, равными значениям крайних позиций исходного трехпозиционного регулятора относительно средней. 2 з.п.ф-лы, 1 ил.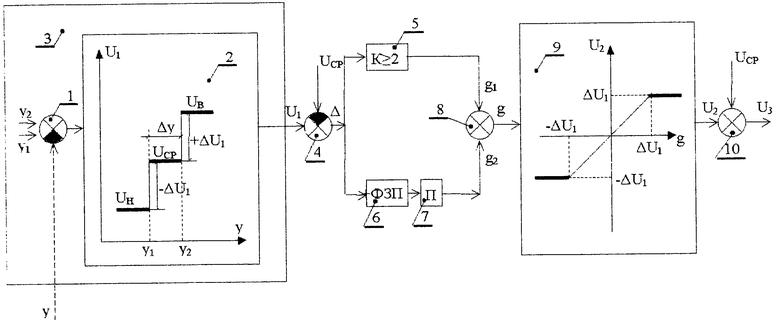
| МАГЕРГУТ В.З | |||
| и др | |||
| Адаптивные позиционные регуляторы и перспективы их применения | |||
| - Приборы и системы управления, №11, 1998, с.53-56 | |||
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2155361C2 |
| ДВУХПОЗИЦИОННЫЙ АДАПТИВНЫЙ ЭЛЕКТРОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2138071C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2144690C1 |
| US 3546559 А, 08.12.1970 | |||
| US 4366534 А, 28.12.1982 | |||
| Пуговица | 0 |
|
SU83A1 |

