Изобретение относится к области автоматического управления, а именно к двухпозиционному регулированию. Оно может быть использовано для автоматического управления процессами как в промышленности (регулирование температуры в нагревательных печах, прессах, экструдерах, регулирование уровня в кубах ректификационных колонн и т.п.), так и в быту (регулирование температуры в бытовых электронагревательных приборах).
Известен способ автоматического двухпозиционного релейного регулирования, основанный на задании сигнала задания регулируемой величины и управляющих воздействий, соответствующих позициям регулятора, соответственно, нижней и верхней (см. например, А.С. Клюев. Двухпозиционные автоматические регуляторы и их настройка. М.: Энергия, 1967 г.). При этом значения позиций регулятора должны быть меньше (для нижней) и больше (для верхней) нагрузки объекта регулирования, т.е. нагрузка объекта должна находиться между позициями регулятора.
Для улучшения качества регулирования применяют способ автоматического двухпозиционного регулирования с использованием неполного притока и оттока энергии, т.е. когда управляющие воздействия, соответствующие позициям регулятора, принимают значения меньше (для верхней позиции) и больше (для нижней) крайних значений, обеспечиваемых исполнительным устройством системы регулирования (см. например, А.А. Кампе-Немм. Автоматическое двухпозиционное регулирование. М.: Найка, 1967 г.).
Однако, при совместном использовании известных способов они не дают необходимого улучшения качества регулирования, если нагрузка объекта меняется. Сближение значений позиций с нагрузкой в этом случае затруднено. Более того, нагрузка объекта регулирования может выйти из зоны позиций регулятора, что приведет к неустойчивости системы.
Целью изобретения является повышение качества при двухпозиционном регулировании для объектов с меняющейся нагрузкой.
Для этого задают три значения сигналов задания регулируемой величины: номинального (N) и двух сигналов зоны адаптации, отличающихся от номинального на некоторую величину ±δ, т.е. N+δ и N-δ, определяющих зону адаптации N±δ.
Номинальное значение сигнала задания (N) служит, как и в способе релейного регулирования, для переключения управляющих воздействий (позиций регулятора) с большего значения на меньшее или наоборот, причем в первоначальный момент времени регулирования формируют их крайние значения, т.е. U1 min (нижнюю позицию регулятора) и U2 max (верхнюю позицию регулятора).
Сигналы задания N+δ и N-δ зоны адаптации предназначены для адаптации управляющих воздействий (позиций) регулятора к нагрузке, с которой работает объект. Причем, если, например, значение регулируемой величины превысит верхнюю границу зоны адаптации N+δ и при этом будет включена верхняя позиция регулятора, то значение нижней позиции регулятора будет увеличиваться по тому или иному закону, например апериодическому, в функции времени выбега регулируемой величины за зону адаптации, в данном случае за N+δ, стремясь при этом к крайнему значению верхней позиции, т.е. U2 max. Если же, при той же характеристике регулятора, значение регулируемой величины станет меньше значения нижней границы зоны адаптации N-δ, и при этом будет включена нижняя позиция регулятора, то значение управляющего воздействия, соответствующее верхней позиции регулятора, будет уменьшаться по тому же закону, что и нижняя позиция, в функции времени выбега регулируемого параметра за N-δ, стремясь при этом к U1 min.
Таким образом, значение недействующего управляющего воздействия (позиции) регулятора изменяется по определенному закону в сторону сближения с крайним значением действующей позиции в функции времени выбега регулируемой величины за зону адаптации ±δ.
Однако, при таком способе регулирования возможен случай, когда позиции регулятора перехлестнутся, т.е. значение нижней позиции станет больше значения верхней, т.е. U1 > U2. Во избежание этого, позиции регулятора постоянно сравниваются, и в случае их перехлеста, действующему значению управляющего воздействия (позиции) присваивается его крайнее значение, т.е. U1 min или U2 max.
При данном способе регулирования процесс адаптации позиций регулятора имеет место только при выбеге регулируемой величины за зону адаптации, т.к. изменение (адаптация) значений управляющих воздействий (позиций) осуществляется только в функции времени выбега регулируемой величины за зону ±δ и не может осуществляться при вхождении величины в зону. Прекращение адаптации позиций регулятора происходит в том случае, если амплитуда (размах) автоколебаний Δx не будет превышать границ зоны адаптации, т.е. N-δ < Δx < N+δ.
На чертеже представлена блок-схема устройства, позволяющего реализовать предлагаемый способ автоматического двухпозиционного регулирования.
Устройство содержит: адаптивный двухпозиционный регулятор I; объект регулирования II с меняющейся нагрузкой F.
Регулятор содержит четыре элемента сравнения 1-4 с пороговыми элементами, формирующих дискретные управляющие сигналы x1-x4, релейный элемент 5 с изменяющимися значениями верхней (U2) и нижней (U1) позиций, крайние значения которых могут достигать соответственно значений U2 max и U1 min, элемент перенастройки позиций 6 и элемент управления 7, образующих блок управления III, выходной управляющий канал U и три входных канала для задания сигналов задания: N = Yзд; N-δ и N+δ.
Командный сигнал x2 управляет переключением позиций с U1 на U2 или наоборот. Сигнал x1 через элемент 6 осуществляет перенастройку (адаптацию) U2 (верхней позиции) регулятора в функции времени выбега регулируемой величины за нижнюю границу зоны адаптации, т.е. N-δ. Таким образом изменение верхних позиций регулятора N+δ можно записать как: ΔU2 = f(t2), где t2 - время длительности выбега величины за N-δ. Сигнал x3 через элемент осуществляет перенастройку нижней позиции регулятора в функции времени выбега регулируемой величины за N+δ. Изменение ΔU1 при этом можно записать как: ΔU1 = f(t1), где t1 - время длительности выбега величины за N+δ. Командный сигнал x4 через элемент 7 осуществляет возврат действующей позиции регулятора в свое крайнее положение U2 max или U1 min в случае перехлеста позиций.
Перенастройка воздействия U1 производится в сторону сближения с крайним значением управляющего воздействия U2, т.е. U2 max, перенастройка воздействия U2 производится в сторону сближения с U1 min. При этом скорость изменения управляющих воздействий U2 и U1 определяется в соответствии с динамическими особенностями объекта регулирования и задается элементом перенастройки позиций 6.
Автоматически перенастраивая воздействия U2 и U1 по тому или иному закону, например апериодическому, в функции времени выбега регулируемой величины за зону адаптации ±δ, удается некоторым запаздыванием компенсировать изменение нагрузки F, влияющее на качество переходного процесса.
В настоящее время разрабатываются ряд устройств-регуляторов, работающих по данному способу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2155361C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2158435C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2129726C1 |
| СПОСОБ РЕАЛИЗАЦИИ ТРЕХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2001 |
|
RU2220432C2 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2153696C2 |
| ДВУХПОЗИЦИОННЫЙ АДАПТИВНЫЙ ЭЛЕКТРОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2138071C1 |
| СПОСОБ РЕАЛИЗАЦИИ ДВУХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2007 |
|
RU2362198C1 |
| СИСТЕМА АДАПТИВНОГО ДВУХПОЗИЦИОННОГО УПРАВЛЕНИЯ | 2010 |
|
RU2430398C1 |
| СПОСОБ АДАПТИВНОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2498386C1 |
| СПОСОБ АДАПТИВНОГО ТРЕХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2474856C1 |
Изобретение относится к области автоматического управления, а именно к двухпозиционному регулированию, и может быть использовано как в промышленности, так и в бытовой технике (регулирование температуры, уровня и т.д.). Техническим результатом является улучшение качества регулирования объектов с меняющейся нагрузкой. Для этого задают два сигнала, определяющих зону адаптации, и при выбеге регулируемой величины за зону адаптации изменяют недействующее значение управляющего воздействия регулятора в сторону крайнего значения действующего управляющего воздействия, в функции времени выбега регулируемой величины за зону адаптации, при этом производят постоянное сравнение позиций регулятора и в случае их перехлеста формируют крайнее значение действующей позиции регулятора. 1 ил.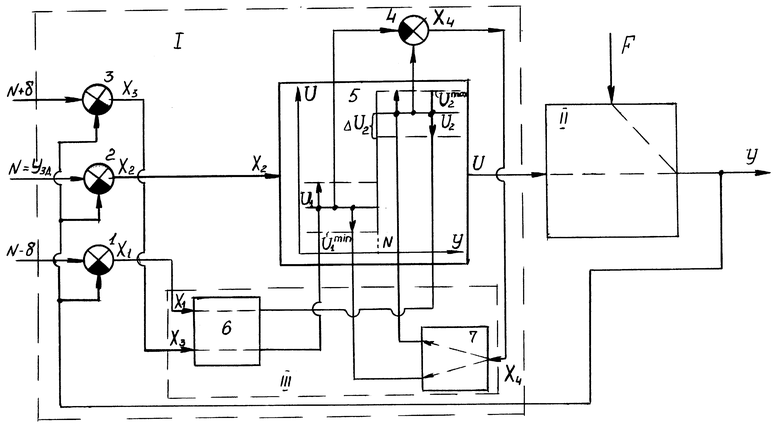
Способ автоматического двухпозиционного релейного регулирования, основанный на задании сигнала задания регулируемой величины N, а также управляющих воздействий, соответствующих верхней и нижней позициям регулятора, причем сигнал задания регулируемой величины служит для переключения позиций регулятора с верхней на нижнюю или наоборот, отличающийся тем, что дополнительно задают два сигнала, определяющих зону адаптации N±δ, и при выбеге регулируемой величины за зону адаптации изменяют недействующее значение управляющего воздействия (позицию) регулятора в сторону крайнего значения действующего управляющего воздействия в функции времени выбега регулируемой величины за зону адаптации ±δ, причем это значение может достигать значений задаваемых исходных крайних позиций, а также производят постоянное сравнение позиций регулятора и в случае их перехлеста формируют крайнее значение действующей позиции регулятора.
| Кампе-Немм А.А | |||
| Автоматическое двухпозиционное регулирование.-М.: Наука, 1967, с.27-29 | |||
| Клюев А.С | |||
| Двухпозиционные автоматические регуляторы и их настройка.-М.: Энергия, 1967, с.66-70 | |||
| В. В. Рыбальченко\ВМБЛеяОлЬйЛ | 0 |
|
SU264021A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1972 |
|
SU429414A1 |
| Пневматический двухпозиционный регулятор | 1987 |
|
SU1411706A1 |
| ДВУХПОЗИЦИОННЫЙ БЕСКОНТАКТНЫЙ РЕГУЛЯТОР | 0 |
|
SU200924A1 |
| GB 1380079 A, 08.01.75 | |||
| US 4366534 A, 28.12.82. | |||
