Изобретение относится к точному приборостроению и может быть применено для построения силовых гиростабилизаторов различных типов.
Известен способ [1] обеспечения устойчивости гиростабилизаторов различных типов, содержащий измерение углового положения гироскопа относительно платформы и создающий момент, пропорциональный этому отклонению относительно оси стабилизации по типу отрицательной обратной связи, дополненный измерением угловой скорости платформы гиростабилизатора относительно оси стабилизации, формированием дополнительного момента, пропорционального этой угловой скорости, приложенного относительно оси стабилизации по типу отрицательной обратной связи.
Недостатком данного способа являются повышенные динамические ошибки стабилизации при колебаниях объекта относительно оси, совпадающей с осью стабилизации, источником которых является момент, порождаемый процессом измерения угловой скорости.
Известен способ [2] обеспечения устойчивости силового гиростабилизатора, который применен в гировертикали, построенной по силовой схеме. Для каждого контура стабилизации, содержащего измерение углового положения гироблока относительно платформы и создающего момент, пропорциональный этому отклонению относительно оси стабилизации по типу отрицательной обратной связи, обеспечение устойчивости достигается путем увеличения демпфирования относительно оси стабилизации с помощью увеличения приведенного электрического демпфирования, создаваемого стабилизирующим мотором посредством повышения редукции. В этом способе используется противоЭДС стабилизирующего мотора, которая трансформируется в создание момента демпфирования, пропорционального крутизне скоростной характеристике, умноженной на квадрат коэффициента редукции.
Недостатком данного способа являются повышенные динамические ошибки стабилизации при колебаниях объекта относительно оси, совпадающей с осью стабилизации, а также люфты в редукторах, которые могут приводить к нелинейным колебаниям.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении устойчивости работы контура стабилизации – расширении области устойчивости.
Технический результат достигается тем, что в способе повышения устойчивости гиростабилизатора, включающем измерение угла поворота гироблока гиростабилизатора и формирование относительно оси стабилизации момента пропорционального измеренному углу, новым является то, что в опорах подвеса гироблока измеряют усилия, преобразуют в напряжение и далее создают дополнительный момент по оси стабилизации в функции усилия в опорах подвеса гироблока, направленный на уменьшение усилия в опорах подвеса гироблока, при этом область параметров при формировании дополнительного момента определяется неравенством
 ,
,
где  крутизна характеристики при измерении усилия;
крутизна характеристики при измерении усилия;  коэффициент усиления по напряжению при создании дополнительного момента;
коэффициент усиления по напряжению при создании дополнительного момента;  коэффициент момента и сопротивление обмотки ротора стабилизирующего мотора;
коэффициент момента и сопротивление обмотки ротора стабилизирующего мотора;  расстояние между опорами подвеса гироблока;
расстояние между опорами подвеса гироблока;  передаточное число редукции момента.
передаточное число редукции момента.
Способ повышения устойчивости гиростабилизатора поясняется чертежом фиг.1, на котором представлена кинематическая схема гиростабилизатора со структурной схемой управления и на котором приняты следующие обозначения.
1. Гироблок (гироузел).
2. Полуоси подвеса гироблока.
3.1, 3.2 Опоры подвеса гироблока.
4. Наружная рама.
5. Полуоси подвеса наружной рамы.
6. Датчик угла прецессии.
7. Усилитель стабилизации.
8. Преобразователь усилий в напряжение.
9. Усилитель дополнительного контура.
10. Сумматор.
11. Стабилизирующий мотор.
 угол, угловая скорость и угловое ускорение прецессии гироблока.
угол, угловая скорость и угловое ускорение прецессии гироблока.
 угол, угловая скорость и угловое ускорение наружной рамы.
угол, угловая скорость и угловое ускорение наружной рамы.
 усилия в опорах подвеса гироблока.
усилия в опорах подвеса гироблока.
 расстояние между опорами подвеса гироблока.
расстояние между опорами подвеса гироблока.
 возмущающий момент.
возмущающий момент.
 напряжение управления для формирования основного момента.
напряжение управления для формирования основного момента.
 напряжение управления для формирования дополнительного момента.
напряжение управления для формирования дополнительного момента.
Для пояснения способа повышения устойчивости гиростабилизатора рассмотрим работу основного и дополнительного контуров, например одноосного силового гиростабилизатора, представленного на фиг.1. Гиростабилизатор состоит из гироблока 1, помещенного своими полуосями 2 с помощью опор подвеса 3.1 и 3.2 в наружную раму 4, которая своими полуосями 5 установлена в опорах подвеса корпуса. Основной контур – контур силовой стабилизации состоит из датчика угла прецессии 6, по сигналу которого с помощью усиления в усилителе 7 формируют основной момент стабилизирующего мотора 11, который компенсирует действие возмущающего момента  , устанавливая вектор кинетического момента
, устанавливая вектор кинетического момента  в положение перпендикулярное оси 5 подвеса наружной рамы 4 с точностью до статической погрешности. Для обеспечения устойчивости гиростабилизатора предлагается способ, основанный на измерении усилий
в положение перпендикулярное оси 5 подвеса наружной рамы 4 с точностью до статической погрешности. Для обеспечения устойчивости гиростабилизатора предлагается способ, основанный на измерении усилий  в осях подвеса 2 гироблока 1, которые будут определяться действием гироскопического момента
в осях подвеса 2 гироблока 1, которые будут определяться действием гироскопического момента  со стороны гироблока и инерционным моментом
со стороны гироблока и инерционным моментом  со стороны наружной рамы, к которой приложены возмущающий момент и момент стабилизирующего мотора. При этом измеренное усилие с помощью преобразователя усилия в напряжение 8 создает дополнительный момент, который при определенных условиях повышает устойчивость работы гиростабилизатора.
со стороны наружной рамы, к которой приложены возмущающий момент и момент стабилизирующего мотора. При этом измеренное усилие с помощью преобразователя усилия в напряжение 8 создает дополнительный момент, который при определенных условиях повышает устойчивость работы гиростабилизатора.
Доказательство повышения устойчивости.
Для этого запишем уравнения движения гиростабилизатора в обобщенном виде с инерционными членами, учет которых необходим для исследования устойчивости

где (1) – уравнение моментов относительно оси стабилизации; (2) – уравнение моментов относительно оси подвеса гироблока; (3) – уравнение электрической цепи стабилизирующего мотора; (4) – уравнение управления для формирования основного момента; (5) – уравнение управления для формирования дополнительного момента; (6) – уравнение формирования усилия в опорах;  моменты инерции подвижных элементов относительно осей подвеса рамы и гироблока;
моменты инерции подвижных элементов относительно осей подвеса рамы и гироблока;  кинетический момент гироблока;
кинетический момент гироблока;  ток ротора стабилизирующего мотора;
ток ротора стабилизирующего мотора;  электрическая постоянная времени, коэффициенты момента и противо-ЭДС, активное сопротивление ротора стабилизирующего мотора;
электрическая постоянная времени, коэффициенты момента и противо-ЭДС, активное сопротивление ротора стабилизирующего мотора;  возмущающий момент;
возмущающий момент;  крутизна датчика угла прецессии;
крутизна датчика угла прецессии;  коэффициенты усиления в цепях формировании основного и дополнительного моментов;
коэффициенты усиления в цепях формировании основного и дополнительного моментов;  коэффициент преобразования усилия в напряжение.
коэффициент преобразования усилия в напряжение.
Анализ повышения устойчивости проведем с помощью алгебраического критерия Гурвица. Для этого, записав систему (1) – (6) в операторной форме, составим характеристическое уравнение
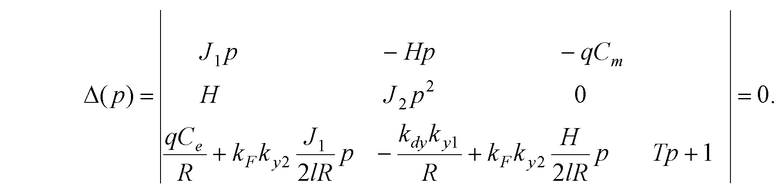
Или в развернутом виде

где коэффициенты характеристического уравнения равны

Составив из коэффициентов характеристического уравнения (7) определитель Гурвица, составим в соответствии со стандартной процедурой необходимые и достаточные условия устойчивости гиростабилизатора

Анализ условий устойчивости.
Определители будем обозначать с двумя нижними индексами, при этом первая цифра соответствует номеру определителя в критерии Гурвица, а вторая цифра наличие дополнительного контура:  соответствует гиростабилизатору без дополнительного контура, а
соответствует гиростабилизатору без дополнительного контура, а  гиростабилизатору с дополнительным контуром, в котором реализован предлагаемый способ повышения устойчивости на основе измерения усилий в опорах подвеса гироблока.
гиростабилизатору с дополнительным контуром, в котором реализован предлагаемый способ повышения устойчивости на основе измерения усилий в опорах подвеса гироблока.
1. Гиростабилизатор без дополнительного контура.
Коэффициенты характеристического уравнения (8), кроме  и
и  , останутся неизменными, при этом
, останутся неизменными, при этом  и условия устойчивости (9) принимают вид
и условия устойчивости (9) принимают вид

которое всегда выполняется,


или после преобразований и сокращения на  ,
,  запишем в виде
запишем в виде

2. Гиростабилизатор с дополнительным контуром.
Условия устойчивости (9) принимает вид

т.е.  .
.
Анализ соотношения определителей  и
и  .
.
В соответствии с формулами (8) и (9) определитель  принимает вид
принимает вид

сократив который на  , перепишем как
, перепишем как

а с учётом (10) полученный определитель примет окончательный вид

На основании анализа (11) - (13) под расширением области устойчивости будем понимать выполнение очевидных гарантированных условий

в которых последнее неравенство накладывает ограничение на суммарный коэффициент усиления 

если принять, что  , то
, то

Пример, поясняющий расширение области устойчивости
Рассмотрим гиростабилизатор со следующими параметрами:



Исходя из заданной статической точности из уравнений (1)-(4) без наличия дополнительного контура определяем суммарный коэффициент усиления с учетом крутизны датчика углов прецессии

1). Область устойчивости без измерения усилия в опорах подвеса гироблока
При этом способе формирования управления область устойчивости определяется выражением (10)

Следовательно, гиростабилизатор неустойчив.
2). Область устойчивости при измерении усилия в опорах подвеса гироблока
При этом способе формирования управления область устойчивости определяется выражением (13), но предварительно необходимо определить  , задав коэффициент
, задав коэффициент  , например, в середине допустимой области
, например, в середине допустимой области  . На основании (15) имеем
. На основании (15) имеем

 Следовательно, гиростабилизатор с введением в контур стабилизации измеренной информации об усилии в опорах подвеса гироблока становится устойчивым, при прочих равных условиях.
Следовательно, гиростабилизатор с введением в контур стабилизации измеренной информации об усилии в опорах подвеса гироблока становится устойчивым, при прочих равных условиях.
Область устойчивости (13) была исследована в функции ключевого комплексного параметра  , который также определяет область положительности коэффициента
, который также определяет область положительности коэффициента  .
.
Выводы.
1. Область устойчивости (13) остается положительной при изменении параметра в диапазоне 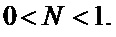
2. При  , что соответствует отсутствию контура создания дополнительного момента, пропорционального усилию в опорах подвеса гироблока, данный гиростабилизатор становится неустойчивым.
, что соответствует отсутствию контура создания дополнительного момента, пропорционального усилию в опорах подвеса гироблока, данный гиростабилизатор становится неустойчивым.
3. При  контур создания дополнительного момента, пропорционального усилию в опорах подвеса гироблока, начинает играть отрицательную роль гиростабилизатор также становится неустойчивым.
контур создания дополнительного момента, пропорционального усилию в опорах подвеса гироблока, начинает играть отрицательную роль гиростабилизатор также становится неустойчивым.
4. При  гиростабилизатор становится структурно неустойчивым.
гиростабилизатор становится структурно неустойчивым.
5. График зависимости  , характеризующий границу области устойчивости в функции параметра
, характеризующий границу области устойчивости в функции параметра  , имеет параболический характер, а максимальный запас по устойчивости соответствует
, имеет параболический характер, а максимальный запас по устойчивости соответствует  для гиростабилизатора с приведенными выше параметрами.
для гиростабилизатора с приведенными выше параметрами.
6. Применение данного способа с одной стороны расширяет область устойчивости, что упростит построение корректирующих устройств гиростабилизатора, а с другой стороны позволяет уменьшить нагрузки на опоры подвеса гироблока, что повышает долговечность этих опор.
Источники информации
1. Бесекерский В.А., Фабрикант Е.А. Динамический синтез систем гироскопической стабилизации / Ленинград: Издательство «Судостроение», 1968. – 351с.
2. Малогабаритная гировертикаль МГВ-1С. Техническое описание и инструкция по эксплуатации / М.: Машиностроение, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| Способ стабилизации гироскопической платформы | 2023 |
|
RU2826509C1 |
| Способ калибровки гироблоков платформы трехосного гиростабилизатора | 2020 |
|
RU2757854C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2016 |
|
RU2630526C1 |
Изобретение относится к точному приборостроению, а именно к проектированию силовых гироскопических стабилизаторов. Сущность заявленного технического решения заключается в следующем. При работе гиростабилизатора измеряют угол поворота гироблока, пропорционально которому формируется момент относительно оси стабилизации, а также измеряют усилие в опорах подвеса гироблока и формируют дополнительный момент по оси стабилизации, пропорциональный измеренному усилию и направленный на уменьшение измеряемого усилия. Область параметров при формировании дополнительного момента ограничена неравенством  , где
, где  – крутизна характеристики при измерении усилия,
– крутизна характеристики при измерении усилия,  – коэффициент усиления по напряжению при формировании дополнительного момента,
– коэффициент усиления по напряжению при формировании дополнительного момента,  ,
,  – коэффициент момента и сопротивление обмотки ротора стабилизирующего мотора;
– коэффициент момента и сопротивление обмотки ротора стабилизирующего мотора;  – расстояние между опорами подвеса гироблока,
– расстояние между опорами подвеса гироблока,  – передаточное число редукции момента. Техническим результатом изобретения является расширение области устойчивости параметров гиростабилизатора и снижение нагрузки на опоры подвеса гироблока. 1 ил.
– передаточное число редукции момента. Техническим результатом изобретения является расширение области устойчивости параметров гиростабилизатора и снижение нагрузки на опоры подвеса гироблока. 1 ил.
Способ повышения устойчивости гиростабилизатора, включающий измерение угла поворота гироблока гиростабилизатора и формирование относительно оси стабилизации момента, пропорционального измеренному углу, отличающийся тем, что в опорах подвеса гироблока измеряют усилия, преобразуют в напряжение и далее создают дополнительный момент по оси стабилизации в функции усилия в опорах подвеса гироблока, направленный на уменьшение усилия в опорах подвеса гироблока, при этом область параметров при формировании дополнительного момента определяется неравенством
 ,
,
где  крутизна характеристики при измерении усилия;
крутизна характеристики при измерении усилия;  коэффициент усиления по напряжению при создании дополнительного момента;
коэффициент усиления по напряжению при создании дополнительного момента;  коэффициент момента и сопротивление обмотки ротора стабилизирующего мотора;
коэффициент момента и сопротивление обмотки ротора стабилизирующего мотора;  расстояние между опорами подвеса гироблока;
расстояние между опорами подвеса гироблока;  передаточное число редукции момента.
передаточное число редукции момента.
| Способ стабилизации гироскопической платформы и устройство для его осуществления | 2015 |
|
RU2614924C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ В СОСТАВЕ ГИРОСТАБИЛИЗАТОРА ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА И ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1990 |
|
RU2120109C1 |
| US 20150057959 B2, 17.08.2016 | |||
| CN 107462261 A, 12.12.2017. | |||

