Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля геометрических параметров лопаток и межлопаточных каналов лопаточных решеток рабочих колес и направляющих аппаратов машины, например, газотурбинного двигателя, турбины и др. Лопаточная решетка машины выполняется в виде вращающихся рабочих колес и неподвижных направляющих аппаратов. В рабочих колесах лопатки закрепляются на диск хвостовиками так, чтобы перо лопаток было направлено от центра диска. А в направляющих аппаратах лопатки закрепляются на кольцо хвостовиками так, чтобы перо лопаток было направлено к центру диска.
Известно устройство для контроля профиля турбинных лопаток [1]. Оно включает в себя поворотный стол, по одну сторону которого расположен щелевой источник света, а по другую - экран. Для проведения измерений используют эталонную лопатку, которую предварительно устанавливают на поворотный стол, проецируют ее изображение на экран, отмечают контур сечения метками при разных углах поворота. Далее заменяют эталонную лопатку контролируемой и по разности проекций контуров судят о профиле лопатки. Недостатком известного устройства и реализующего его способа является невозможность контролировать параметры лопаточной решетки, а также длительность и малая объективность процесса контроля, необходимость изготовления эталонной лопатки.
Наиболее близким к заявляемому является устройство для определения геометрических параметров лопаток лопаточного колеса машины [2]. Оно содержит базовое основание, связанный с ним опорный узел для лопатки лопаточного колеса, подвижный относительно базового основания узел измерения отклонения геометрического параметра лопаток лопаточного колеса в заданном сечении, включающий в себя стрелочный индикатор, закрепленные посредством горизонтальной оси на базовом основании поворотное основание и уровень, установленную в последнем ампулу с пузырьком и расположенную на его свободном конце направляющую рамку, выполненную с верхней и боковой площадками, регулировочный микрометрический винт для контакта с поворотным основанием, установленный в этой рамке по оси, перпендикулярной продольной оси ампулы с пузырьком, для юстировки положения уровня, червячную пару, червяк которой связан с микрометрическим винтом, дополнительный стрелочный индикатор, шкала которого выполнена минутной и расположена на верхней площадке направляющей рамки, а стрелка на конце регулировочного микрометрического винта, причем шкала основного стрелочного индикатора выполнена градусной и закреплена на боковой площадке направляющей рамки, а его стрелка на оси шестерни червячной пары, опорный узел для лопатки лопаточного колеса включает в себя линейку с опорной плоскостью, корпус, установленный на линейке подвижно с возможностью фиксации, двухрожковую призму и прижимную пружину, установленные в корпусе, при этом устройство снабжено приводом поворотного основания, включающего в себя червячную пару, шестерня которой закреплена своей осью вращения на базовом основании, выполнена с градусной шкалой и жестко связана с поворотным основанием для установки по горизонтали и фиксации угла хорды пера контрольной лопатки между поворотным основанием и упомянутой линейкой. Данное устройство выбрано за прототип.
Устройство-прототип обладает следующими недостатками. Оно громоздко, сложно по конструкции, имеет большое количество деталей и узлов, механически связанных между собой. Все это ведет к большим аппаратным погрешностям в процессе измерения, особенно при длительной эксплуатации данного устройства. Для обеспечения необходимой точности измерения устройство-прототип нуждается в периодической поверке, причем не только непосредственно узла измерения, но и всех элементов крепления и установки. Самым большим недостатком устройства-прототипа является субъективный характер съема информации, так как установка каждой последующей лопатки на выбранное сечение осуществляется по пузырьку воздуха, положение которого определяется "на глаз". Кроме того, к недостаткам прототипа следует отнести контактный способ съема информации. Это, во-первых, требует повышенного качества поверхности лопаток, что исключает получение достоверных данных при регламентных работах, во-вторых, неизбежно ведет к деформации пера лопатки. Процесс измерений длителен и трудоемок.
Задачей, на решение которой направлено заявляемое изобретение, является устранение указанных недостатков, а именно - повышение точности и объективности съема информации, расширение функциональных возможностей, упрощение конструкции, снижение трудоемкости процесса контроля.
Поставленная задача решается тем, что в устройстве для контроля геометрических параметров лопаток лопаточной решетки машины, содержащем функционально связанные базовое основание, опорный узел для контролируемой лопаточной решетки, подвижный относительно базового основания узел измерения и связанный с ним блок преобразования и представления информации, в котором в отличие от прототипа опорный узел для контролируемой лопаточной решетки выполнен с возможностью вращения последнего вокруг вертикальной оси, узел измерения содержит оптически сопряженные между собой источник и приемник оптического излучения, снабжен датчиком положения и выполнен с возможностью возвратно-поступательного перемещения вдоль продольной оси базового основания и с возможностью углового отклонения в плоскости, перпендикулярной плоскости контролируемой решетки, блок преобразования и представления информации содержит электронный блок обработки и ПЭВМ.
На чертеже представлен общий вид заявляемого устройства.
Устройство для контроля геометрических параметров лопаток лопаточных решеток машины содержит базовое основание 1, опорный узел 2, на котором устанавливается контролируемая решетка 3, снабженная лопатками 4, узел измерения 5, который установлен на базовом основании 1 с возможностью возвратно-поступательного перемещения вдоль продольной оси последнего. Узел измерения 5 содержит оптически сопряженные между собой источник 6 и приемник 7 оптического излучения, например лазерного. В качестве приемника излучения 7 могут быть использованы фотодиоды, фототранзисторы и др. Узел измерения 4 снабжен также электроприводом (не показан), с помощью которого он может быть установлен на определенный угол относительно вертикали в плоскости, перпендикулярной плоскости контролируемой решетки 3, а также датчиком линейного перемещения 8. Блок преобразования и представления информации 9 содержит электронный блок 10 и ПЭВМ 11. Электронный блок обеспечивает обработку информации, поступившей с датчика линейного перемещения 8 и датчика углового положения узла измерения 5, с фотоприемников 7 для выделения информации о положении кромок лопаток по центрам узкого оптического луча. Техническая реализация всех элементов, входящих в электронный блок 10, описана в [3].
Заявляемое устройство работает следующим образом. Работа измерительной системы основана на теневом способе измерений. Теневая проекция параметров установки лопаток получается при облучении их кромок узким оптическим лучом в виде полосы, который направляется от источника излучения 5 на приемник 6. Ширина анализируемой полосы составляет порядка 0,02 мм. По положению пересечения луча кромки лопатки формируется сигнал, временное положение которого в виде кода, вырабатываемого электронным блоком 9, вводится в компьютер 10. Фиксация текущих угловых координат положения изделия по моментам пересечения кромками лопаток оптического луча позволяет зарегистрировать массив параметров установки.
Измеряемая лопаточная решетка (рабочее колесо или направляющий аппарат) 3 устанавливается на опорный узел 2. Далее выставляют узел измерения 5 на определенный заданный радиус лопаточной части решетки 3. Положение узла измерения 5 задается программно и фиксируется датчиком линейного перемещения 8. Лопатка 4 оказывается между источником 6 и приемником 7 оптического излучения.
Поскольку лопатки 4 имеют сложный профиль пера и на заданном радиусе решетки имеют свою степень закрутки для более полного "обзора" сканирующим оптическим лучом, узел измерения последовательно поворачивается на некоторый угол + -θ, задаваемый программно. Возможность поворота узла измерения 5 позволяет, кроме того, производить на одной системе контроль лопаточных колес разных типоразмеров без перенастроек.
Система готова к проведению измерений. Контролируемая решетка 3 приводится во вращательное движение, что обеспечивает сканирование узким оптическим лучом поочередно всех лопаток 4 решетки 3 с одновременной фиксацией фотоприемником 7 и далее блоком преобразования и представления информации моментов образования тени от очередной лопатки и моментов исчезновения этой тени. Чем больше будет оборотов колеса, тем точнее будет произведен контроль лопаток 4 решетки 3. При необходимости (например, для определения площади критического сечения), просканировав решетку 3 на одном радиусе, перемещением узла измерения 5 приступают к сканированию этого колеса на другом радиусе. Зная скорость вращения решетки 3, определяют не только параметры лопаток 4, но и параметры лопаточной решетки, в частности расстояние между соседними лопатками. Таким образом, полный цикл измерений позволяет определить как параметры геометрии каждой лопатки (по положениям кромок), так и параметры установки лопаток в решетке.
Кроме того, предлагаемое техническое решение обеспечивает:
бесконтактное проведение измерений с высокой производительностью - за 5-20 сек измеряются параметры всех лопаток в сечении, что исключает искажения и деформации пера лопаток в процессе измерений;
высокая точность измерений, ввиду:
- полной автоматизации процессов измерений, регистрации и обработки результатов измерений;
- отсутствия деформации пера лопаток в процессе измерений;
- расширенные функциональные возможности, т.к. могут контролироваться не только рабочие колеса, но и направляющие аппараты машины, причем они могут быть установлены не только горизонтально, но и в любых других плоскостях, например, вертикально, когда у машины в сборе смонтированы несколько рабочих колес или направляющих аппаратов;
- малой ширины зоны измерения, равной 10-25 мкм, в зависимости от оптического масштаба, что невозможно обеспечить контактными средствами.
Программное обеспечение устройства, реализованное на ПЭВМ, позволяет автоматизировать процесс измерений, регистрации и обработки результатов измерений десятков типоразмеров рабочих колес и направляющих аппаратов машин (ГТД и др.).
Источники информации
1. Авторское свидетельство СССР 1434241.
2. Патент РФ 2082072 - прототип.
3. Системы технического зрения . Справочник. (В.И. Сырямкин, В.С. Титов, Ю.Г. Якушенков, Р.М. Галиулин и др./Под общей ред. В.И. Сырямкина и В.С. Титова - Томск, МГП "Раско". Издательство "Радио и связь", 1993, с. 36-132.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛОПАТОК | 2003 |
|
RU2254555C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2311614C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2299400C2 |
| СПОСОБ КОНТРОЛЯ ПРОФИЛЯ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2263879C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ РЕЗЬБЫ | 2006 |
|
RU2311610C1 |
| СПОСОБ КОНТРОЛЯ НЕПЛОСКОСТНОСТИ ЛИСТОВЫХ ИЗДЕЛИЙ И СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2254556C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ С РЕЗЬБОВОЙ ПОВЕРХНОСТЬЮ | 2008 |
|
RU2386925C2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ВНУТРЕННЕЙ РЕЗЬБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152000C1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ НАРУЖНОЙ РЕЗЬБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2151999C1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля геометрических параметров лопаток и межлопаточных каналов лопаточных решеток (рабочих колес и направляющих аппаратов) машины. Устройство для контроля геометрических параметров лопаток лопаточной решетки машины содержит функционально связанные базовое основание, опорный узел для контролируемой решетки, выполненный с возможностью вращения последнего вокруг вертикальной оси, подвижный относительно базового основания, узел измерения и связанный с ним блок преобразования и представления информации, датчик линейного перемещения и выполнен с возможностью возвратно-поступательного перемещения вдоль продольной оси базового основания и с возможностью углового отклонения относительно вертикальной оси в плоскости, перпендикулярной плоскости контролируемого колеса, блок преобразования и представления информации содержит электронный блок обработки. Узел измерения содержит оптически сопряженные между собой источник и приемник лазерного излучения. Технический результат - повышение точности и объективности съема информации, снижение трудоемкости процесса контроля. 1 ил.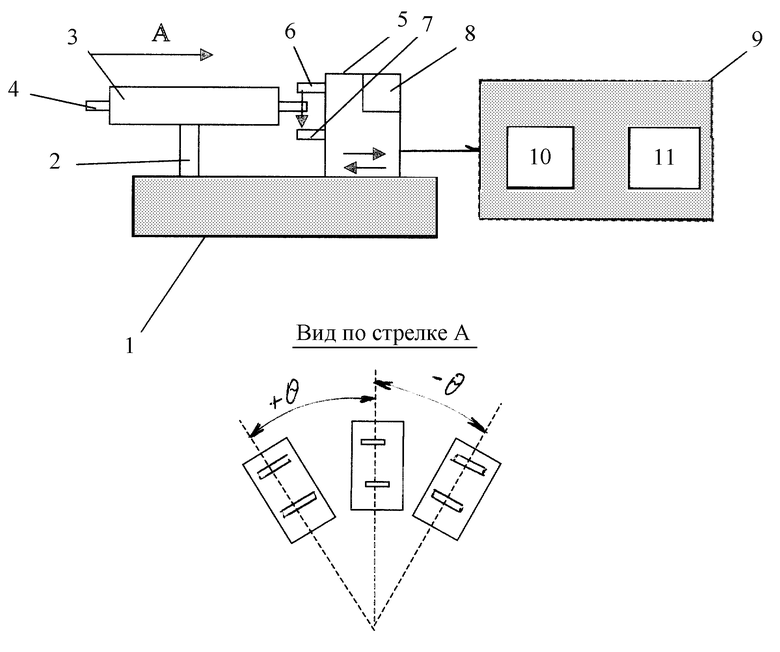
Устройство для контроля геометрических параметров лопаток лопаточной решетки машины, содержащее функционально связанные базовое основание, опорный узел для контролируемой решетки, подвижный относительно базового основания узел измерения и связанный с ним блок преобразования и представления информации, отличающееся тем, что опорный узел для контролируемой решетки выполнен с возможностью вращения последнего вокруг оси, узел измерения содержит оптически сопряженные между собой источник и приемник оптического излучения, снабжен датчиком линейного перемещения и выполнен с возможностью возвратно-поступательного перемещения вдоль продольной оси базового основания и с возможностью углового отклонения в плоскости, перпендикулярной плоскости контролируемой решетки, блок преобразования и представления информации содержит электронный блок обработки и ПЭВМ.
| СПОСОБ БАЛАНСИРОВКИ ЛОПАТОЧНОГО КОЛЕСА МАШИНЫ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛОПАТОК ЛОПАТОЧНОГО КОЛЕСА МАШИНЫ | 1994 |
|
RU2082072C1 |
| Способ контроля профиля турбинных лопаток | 1987 |
|
SU1434241A1 |
| RU 95110236 A1, 10.05.1997 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2025659C1 |
| RU 95111239 А1, 20.04.1997 | |||
| СПОСОБ КОНТРОЛЯ РЕЗЬБОВЫХ ОТВЕРСТИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2051327C1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |

