m Г НГМ- -Ц2 ч -
ел
о о ел
о
со
3150650
Изобретение относится к электротехнике и может быть использоварю в электроприводах с упругой связью между электродвигателем и механизмом.
Цель изобретения - повьпиение надежности.
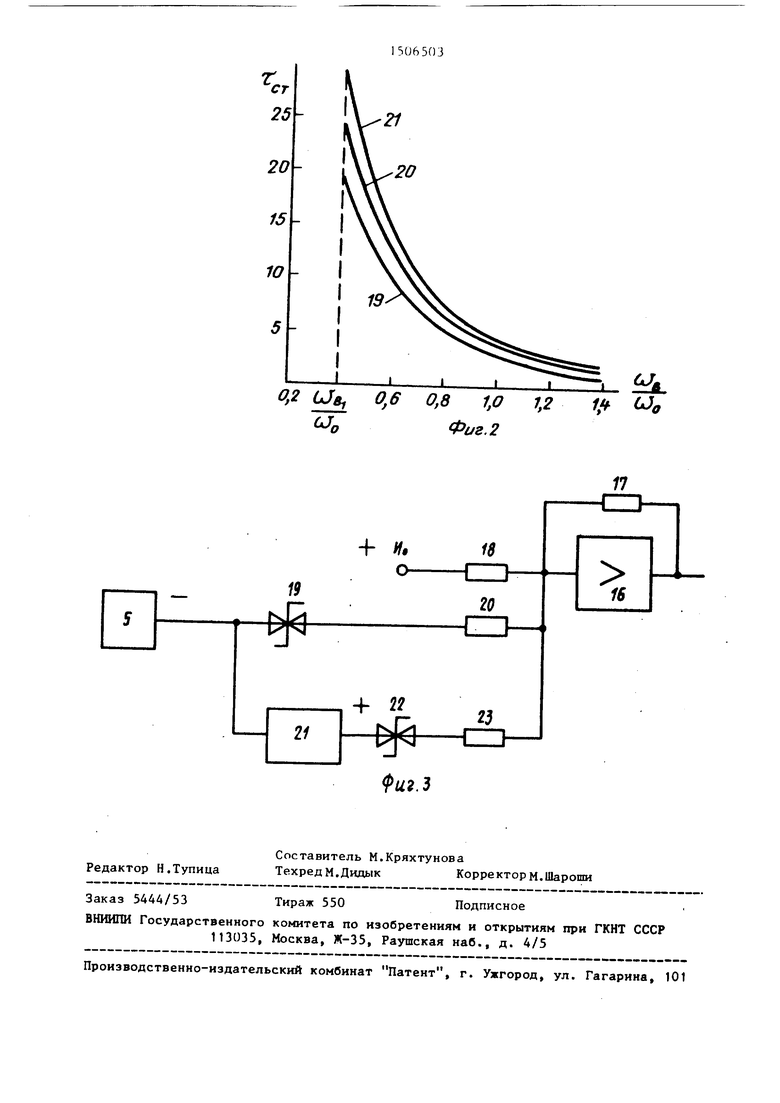
На фиг. 1 представлена схема электропривода; на фиг. 2 - зависимости
для относительной величины оптимальной постоянной времени цепи гибкой обратной связи по току якорной цепи CCT функции отношения частоты возмущающего момента CJg к частоте собственных колебаний w , на фиг. 3 - схема функционального преобразователя.
Электропривод содержит последовательно включенные задатчик 1 скорости вращения, регулятор 2 частоты вращения с блоком 3 ограничения в цепи обратной связи и регулятор 4 тока якоря с подключенными, к их входам датчиками частоты вращения 5 и тока 6, управляемый преобразователь 7, вы- ход которого подключен к якорной цепи электродвигателя 8. Кроме того, электропривод содержит датчик 9 производной тока, множительное устройство 10 и функциональный преобразова- тель 11, при этом первый вход 12 множительного устройства 10 соединен с выходом датчика 9 производной тока, второй вход 13 множительного устройства 10 подключей к выходу функционального преобразователя 11, вход которого соединен с выходом датчика 5, а выход множительного устройства 10 соединен с входом регулятора 2. Электродвигатель 8 через уп- ругую связь 14 соединен с механизмом 15.
Функциональный преобразователь 11 (фиг. 3) содержит усилитель 16 с ре- зисторами.17 в цепи обратной связи, к входу которого подключены резистор 18, а также две параллельные цепи, одна из которых состоит из стабилитрона 19 и резистора 20, а другая
из инвертора 21, стабилитрона 22 и резистора 23.
Электропривод работает следующим образом.
Регулятор 2 частоты вращения с блоком 3 ограничения, имеющим нелинейную характеристику типа зона на- сьвдения, обеспечивает поддержание заданной задатчиком 1 скорости вра
0
5
0 5 0 5 О
5
0
5
34
щения путем сравнения заданной и действительной скорости, измеряемой датчиком 5, а также ограничение задания на ток якоря, поддерживаемый регулятором 4 тока, путем сравнения заданного и действительного, измеряемого датчиком 6 тока, значений тока якоря воздействием на напряжение преобразователя 7.
На первый вход 12 множительного устройства 10 поступает напряжение с выхода датчика 9 производной тока якоря, на второй вход 13 этого устройства поступает напряжение с выхода функционального преобразователя 11, а напряжение с выхода множительного устройства 10 подается на вход регулятора 2 частоты вращения электродвигателя 8.
Коэффициент усиления цепи гибкой отрицательной обратной связи по току якоря, т.е. постоянная времени ст пропорциональна величине напряжения на входе 13 множительного устройст- ва 10.
Это напряжение изменяется в функции частоты вьшужденных колебаний uig, которая пропорциональна скорости электродвигателя 8, с помощью функционального преобразователя 11 таким образом, чтобы для каждого значения частоты (л) в обеспечивалась оптимальная постоянная времени цепи ги бкой обратной связи по току якоря TC.T при которой имеет место минимальное значение амплитуды вынужденных колебаний момента в упругой связи М ,.
Электропривод имеет пропорциональный регулятор 2 и пропорционально- интегральный регулятор А тока. Передаточная функция этого электропривода связанного через упругую связь с механизмом, при внешнем возмущающем воздействии моменте М при выходной величине - моменте М, в упругой связи механизма описывается уравнением
к,(р;,,+ р, -..): с„+
р p(t + v) р, + )
где К - ,( , + 1) - коэффициент,
характеризу- Ю1ЦИЙ соотношение моментов инерции
Т ст ст
),
, -/ c(,
А 3
(I,
W, )
Р, со,
При j
подстановке u)s
двигателя I и механизма
Iii
aijj- относительная величина постоянной времени Т контура гибкой обратной связи по току; частота собственных колебанийдвухмассовой системы; С - жесткость
упругой связи,
степень электрического демпфирования;коэффициент жесткости статической механической характеристики при замкнутой САР;
относитель- ная величина комплексной переменной Р преобразованияЛапласа. в (1) значения
дэ
получаем уравнение амп1 - u)o итудно-частотной характеристики
f - относительная частота во змущающего момента Мд.
Зависимость (3) можно представить виде уравнения
где
г
1-СТ
А В D
А
В - D
0.
Лг 2 Лт 2(p..j - /3„ )
/S, о
(4)
(5) (6) (7)
Значение постоянной времени контура гибкой связи по току f пропорционально коэффициенту усиления цепи этой обратной связи, т.е. пропорционально напряжению на выходе функционального преобразователя 11 - U wrii поступающему на вход 13 множительного устройства 10:
м
(8)
Реализация приведенных на фиг. 2 оптимальных зависимостей обеспечивается характеристикой функционального преобразователя 11. Напряжение на входе этого преобразователя пропорционально скорости электродвигателя, т.е. частота возмущанедего момента
и
В)с 11
KjU)B
(9)
35
Зависимости, приведенные на фиг. 2, при частоте вынужденных колебаний U) и 7 u)j ,могут быть аппроксимированы
уравнением
ст
1
±LL
V 1.1 /
U).
Кз
U). - ы, -j -,
( V. °) к,.
LOr
(10)

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1982 |
|
SU1084934A1 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Электропривод постоянного тока с упругой механической связью между электродвигателем и механизмом | 1985 |
|
SU1325654A1 |
| Способ управления электроприводом поворота экскаватора и устройство для его осуществления | 1986 |
|
SU1416626A1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Способ определения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока | 1985 |
|
SU1307525A1 |
| Способ управления электроприводом постоянного тока дебалансного виброисточника и устройство для его осуществления | 1983 |
|
SU1144065A1 |
| Электропривод постоянного тока | 1986 |
|
SU1476580A1 |
| Электропривод постоянного тока | 1984 |
|
SU1264286A1 |
Изобретение относится к электротехнике и может быть использовано в механизмах с упругой связью между электродвигателем и механизмом. Целью изобретения является повышение надежности. Электропривод содержит множительное устройство 10, выход которого подключен к входу регулятора 2. Входы множительного устройства подключены к датчику 9 производной тока и к функциональному преобразователю 11. В данном устройстве при изменении постоянной времени τCT в функции частоты ΩB поддерживается минимально возможное значение момента в упругой связи, т.е. имеет место эффективное демпфирование механических колебаний для каждой частоты возмущающего момента. 3 ил.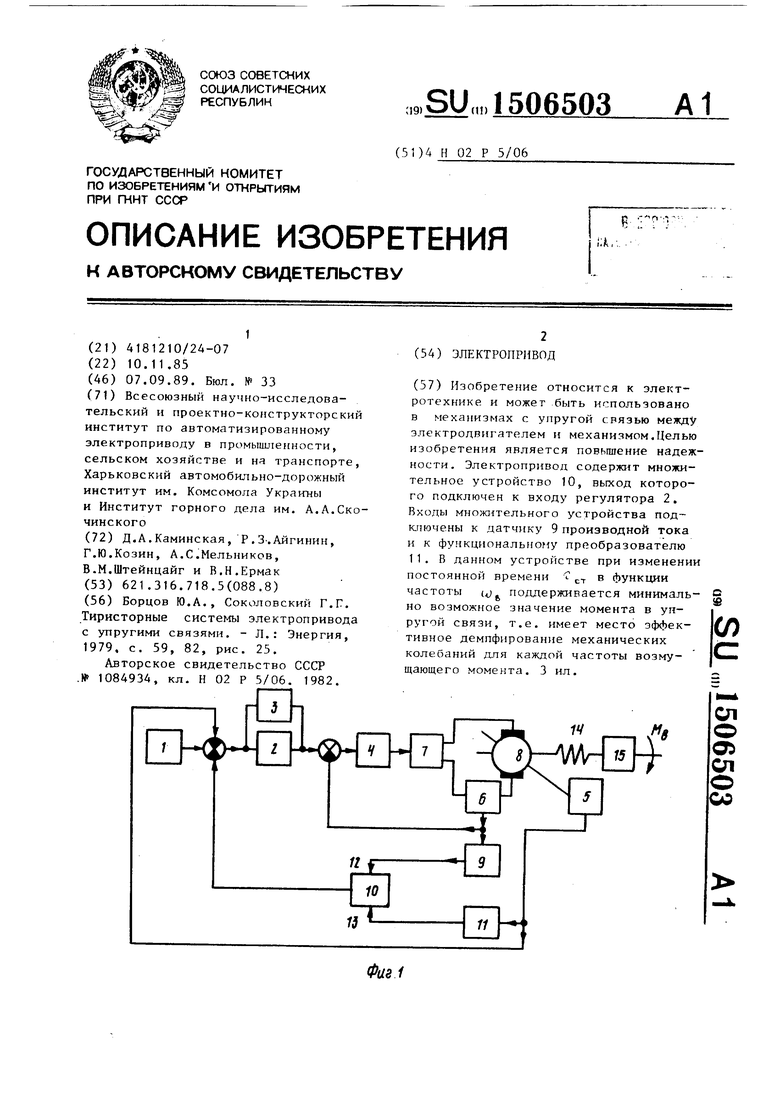
f(ы.
ш„
V
J К,)
Исследование уравнения (2) на экстремум по варьируемому параметру приводит к следующей зависимости для оптимального значения
ст
- ст
-J
ст
,(о(, « iPi) ( () - (, , ) о (3)
/з, ( V
(0 К,( v -t-E ); с, ЧЕ - 1) о(, - 1)(К, V - V),
о(с (K,) (1 -
2)
ст
(3)
1
45,
50
где К
3
КА D.- Ст
коэффициенты пропорциональности;
начальное значение DCT, соответствующее частот
Ы и)в,.
При малых частотах U)g, соответствующих значениям ). когда амплитуда вынужденных колебаний момента М мала, целесообразно поддерживать неизменное значение постоянной времени, равное Ос , для чего необходимо иметь при ы в ш. неиз- менное напряжение на выходе функционального преобразователя 11, определяемое согласно равенству (8) зависимостью
бих n
К,
(11)
Характеристика функционального преобразователя 11, т.е. зависимость 5 между его выходным и входным напряжением,
и«... „ - f(Ue, „)
при U) J u)j, определяется в результате совместного решения уравнений (8) и (10) и определяется выражением i
- l - (Цбх и К,
- to
Bi
w,
К j + (Kg
--. л
. 2)
Характеристика функционального преобразователя 11 по уравнениям (10) и () может быть реализована с помощью диодного функционального преобразо- вателя, схема которого приведена на фиг. 3.
При изменении постоянной времени Ср в функции частоты и/ по уравнению (4), т.е. согласно кривым фиг. 2, поддерживается минимально возможное значение момента в упругой связи, т.е. имеет место наиболее эффективное демпфирование электроприводом механических колебаний для каждой частоты возмущающего момента. Формулаизобретения
Электропривод, содержащий электродвигатель, связанный с механизмом
посредством упругой связи, вентильный преобразователь, подключенный к якорной цепи электродвигателя, последовательно соединенные блок задания, регулятор частоты вращения и регулятор тока с подключенными к их входам соответственно датчиками частоты вра щения и тока, а также дат Лк производной тока, отличающийся тем, что, с целью повышения надежности, в него дополнительно введены множительное устройство и функциональный преобразователь, причем первый вход множительного устройства соединен с выходом датчика производной тока якоря, второй вход множительного устройства подключен к выходу функционального преобразователя, входом соединенным с выходом датчика частоты вращения, а выход множительного устройства подключен к входу регулятора скорости, при этом функциональный преобразователь реализует зависимость
;,, А + г„в - D
О,
где С )
. - постоянная времени цепи гибкой отрицательной обратной связи по току якоря) ы р- частота собственных колебаний двухмассовой системы электропривода с упругой связью; A,B,D - коэффициенты зависящие, от
скорости вращения дЬигате- ля.
25
20 15 Ю
0,2 (JB, 6Л
19
CJ
0,8 1,0 Фиг,2
1,2 /, (о
Н.
о
18
20
«
| Борцов Ю.А., Соколовский Г.Г | |||
| Тиристорные системы электропривода с упругими связями | |||
| - Л.: Энергия, 1979 | |||
| с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Электропривод | 1982 |
|
SU1084934A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
