Способ цифрового управления угловой скоростью трехфазного бесконтактного двигателя постоянного тока относится к области систем управления электродвигателями.
Известен способ управления угловой скоростью трехфазного бесконтактного двигателя постоянного тока, заключающийся в том, что задают тактовый сигнал, задают цифровой сигнал кода управления, на основе которого формируют сигналы модуля и знака кода управления, формируют широтно-импульсный сигнал управления угловой скоростью ротора двигателя в функции сигнала модуля кода управления и тактового сигнала, измеряют сигналы о положении ротора, на основе которых с учетом широтно-импульсного сигнала управления угловой скоростью ротора двигателя, знака кода управления и тактового сигнала формируют сигналы управления ключевыми элементами импульсного усилителя мощности [1].
Недостатками известного способа являются отсутствие защиты от сквозных токов, которые могут возникнуть в момент переключения ключевых элементов (например, транзисторов), расположенных в одной стойке импульсного усилителя мощности, наличие переключения ключевых элементов импульсного усилителя мощности при нулевом входном сигнале кода управления и неравномерная загрузка ключевых элементов импульсного усилителя мощности по току, что приводит к уменьшению надежности ключевых элементов импульсного усилителя мощности и дополнительному потреблению энергии.
Отличием предложенного способа является то, что задают цифровые сигналы разрядности кода управления и частоты прохождения тактового сигнала, на основе которых с учетом модуля кода управления и тактового сигнала корректируют широтно-импульсный сигнал управления угловой скоростью вращения ротора двигателя и формируют сигнал обеспечения равномерной работы ключевых элементов импульсного усилителя мощности, задают цифровой сигнал длительности паузы на переключение ключевых элементов импульсного усилителя мощности, на основе которого с учетом сигналов о положении ротора двигателя, сигнала знака кода управления, широтно-импульсного сигнала управления угловой скоростью вращения ротора двигателя и тактового сигнала формируют три сигнала паузы на переключение ключевых элементов импульсного усилителя мощности, на основе которых с учетом сигналов о положении ротора двигателя, сигнала знака кода управления, широтно-импульсного сигнала управления угловой скоростью вращения ротора двигателя, сигнала обеспечения равномерной работы ключевых элементов импульсного усилителя мощности и тактового сигнала корректируют сигналы управления ключевыми элементами импульсного усилителя мощности.
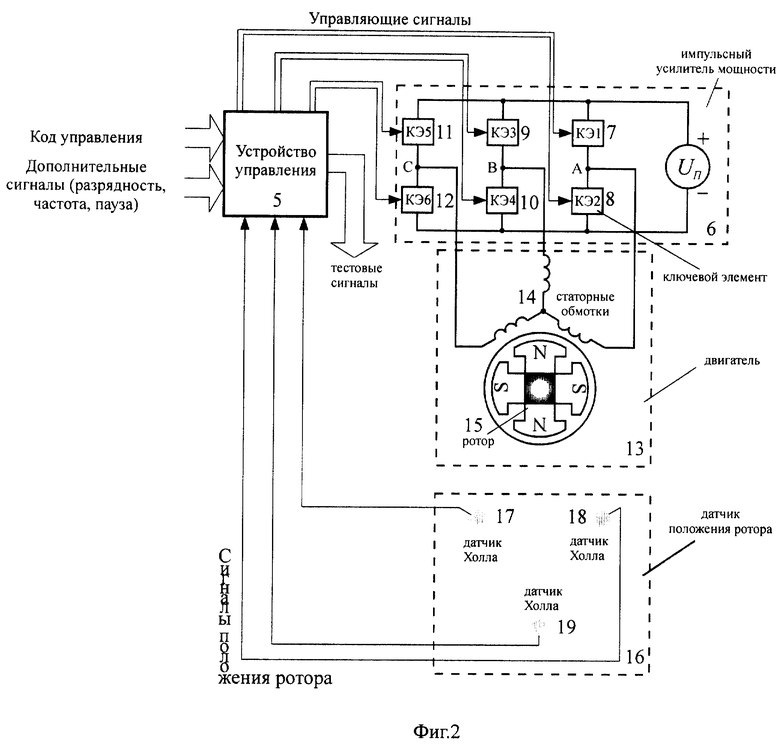
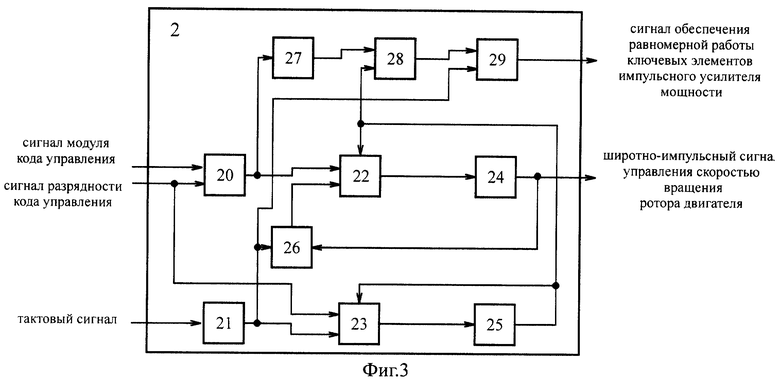
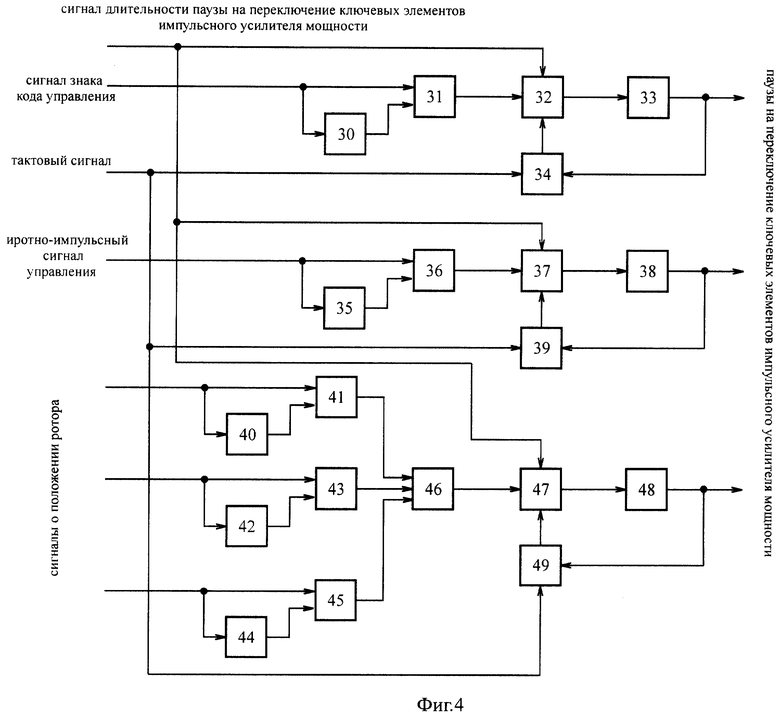
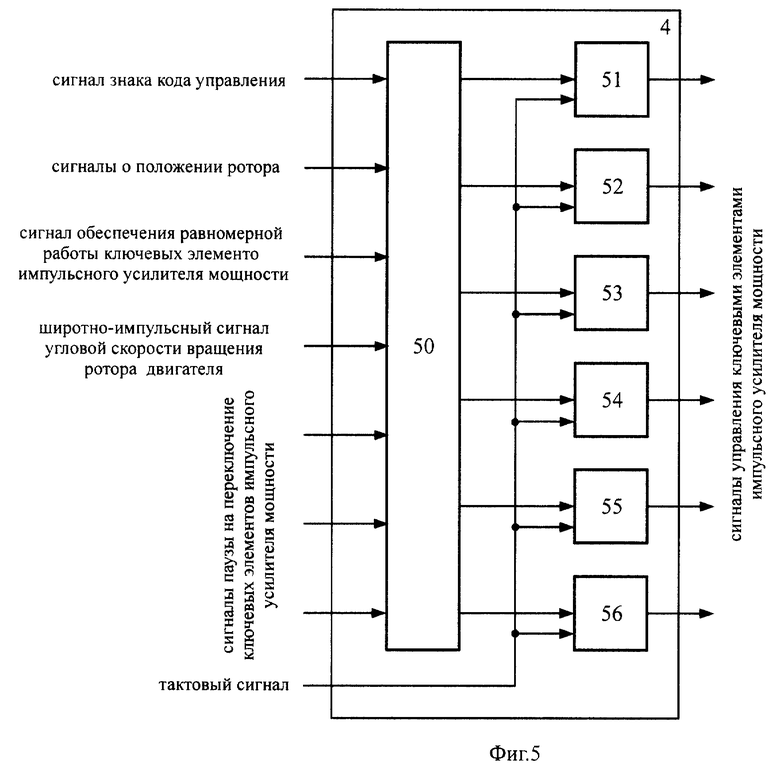
На фиг.1 показана иллюстрация способа управления угловой скоростью трехфазного бесконтактного двигателя постоянного тока. На фиг.2 изображен мехатронный модуль трехфазного бесконтактного двигателя постоянного тока. На фиг. 3 представлен блок формирования широтно-импульсного сигнала управления угловой скоростью вращения ротора двигателя и сигнала обеспечения равномерной работы ключевых элементов импульсного усилителя мощности (возможная реализация). На фиг.4 показан блок формирования сигналов паузы на переключение ключевых элементов импульсного усилителя мощности (возможная реализация). На фиг. 5 изображен блок формирования сигналов управления ключевыми элементами импульсного усилителя мощности (возможная реализация). На фиг.6 показан результат работы блока преобразователя код-широтно-импульсный сигнал [2]. На фиг. 7 изображена временная диаграмма, на которой показаны сформированные сигналы управления ключевыми элементами импульсного усилителя мощности. На фиг. 8 изображено влияние разрядности кода управления и частоты прохождения тактового сигнала на период широтно-импульсного сигнала управления. На фиг.9 показаны результаты работы блока формирования широтно-импульсного сигнала управления угловой скоростью вращения ротора двигателя и сигнала обеспечения равномерной работы ключевых элементов импульсного усилителя мощности. На фиг. 10 изображены результаты работы блока формирования сигналов паузы на переключение ключевых элементов импульсного усилителя мощности. На фиг.11 приведен частный случай временных диаграмм для блока формирования скорректированных сигналов управления ключевыми элементами импульсного усилителя мощности. На фиг. 12 представлен принцип определения направления вектора магнитной индукции якоря на основе векторов магнитной индукции статорных обмоток На фигурах приняты следующие обозначения: 1 - блок выделения сигналов модуля и знака кода управления; 2 - блок формирования широтно-импульсного сигнала управления угловой скоростью вращения ротора двигателя и сигнала обеспечения равномерной работы ключевых элементов импульсного усилителя мощности; 3 - блок формирования сигналов паузы на переключение ключевых элементов импульсного усилителя мощности; 4 - блок формирования сигналов управления ключевыми элементами импульсного усилителя мощности; 5 - устройство управления угловой скоростью трехфазного бесконтактного двигателя постоянного тока; 6 - импульсный усилитель мощности; 7 - первый ключевой элемент; 8 - второй ключевой элемент; 9 - третий ключевой элемент; 10 - четвертый ключевой элемент; 11 - пятый ключевой элемент; 12 - шестой ключевой элемент; 13 - двигатель; 14 - статор; 15 - ротор; 16 - датчик положения ротора; 17 - первый датчик Холла; 18 - второй датчик Холла; 19 - третий датчик Холла; 20 - блок элементов "И"; 21 - делитель частоты; 22 - счетчик работы; 23 - счетчик периода; 24 - первый блок сравнения с нулем (>0); 25 - второй блок сравнения с нулем (=0); 26 - первый элемент "И"; 27 - третий блок сравнения с нулем (>0); 28 - второй элемент "И"; 29 - первый триггер; 30 - второй триггер; 31 - первый элемент "Исключающее ИЛИ"; 32 - первый счетчик; 33 - четвертый блок сравнения с нулем (>0); 34 - третий элемент "И"; 35 - третий триггер; 36 - второй элемент "Исключающее ИЛИ"; 37 - второй счетчик; 38 - пятый блок сравнения с нулем (>0); 39 - четвертый элемент "И"; 40 - четвертый триггер; 41 - третий элемент "Исключающее ИЛИ"; 42 - пятый триггер; 43 - четвертый элемент "Исключающее ИЛИ"; 44 - шестой триггер; 45 - пятый элемент "Исключающее ИЛИ"; 46 - элемент "ИЛИ"; 47 - третий счетчик; 48 - шестой блок сравнения с нулем (>0); 49 - пятый элемент "И"; 50 - блок программируемых логических матриц; 51 - седьмой триггер; 52 - восьмой триггер; 53 - девятый триггер; 54 - десятый триггер; 55 - одиннадцатый триггер; 56 - двенадцатый триггер.
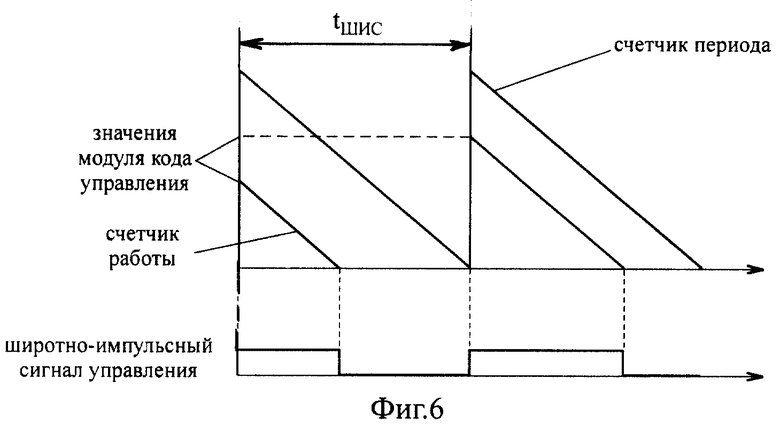
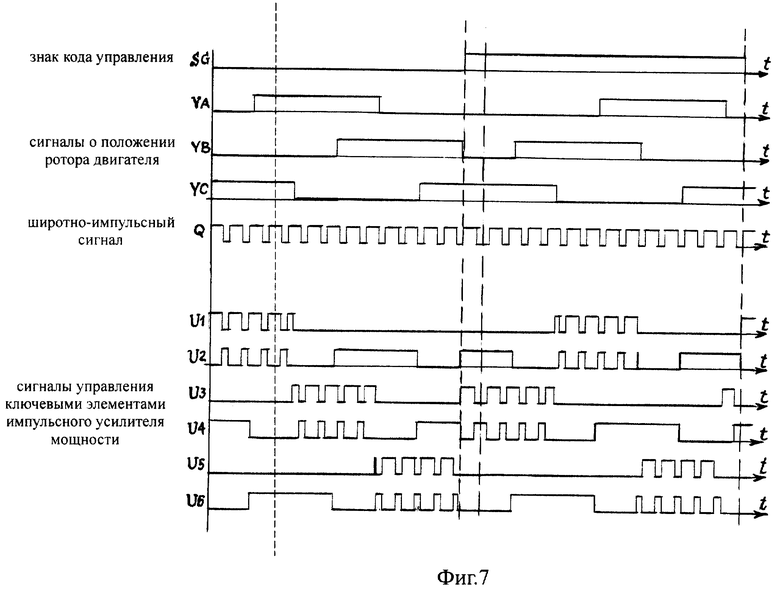
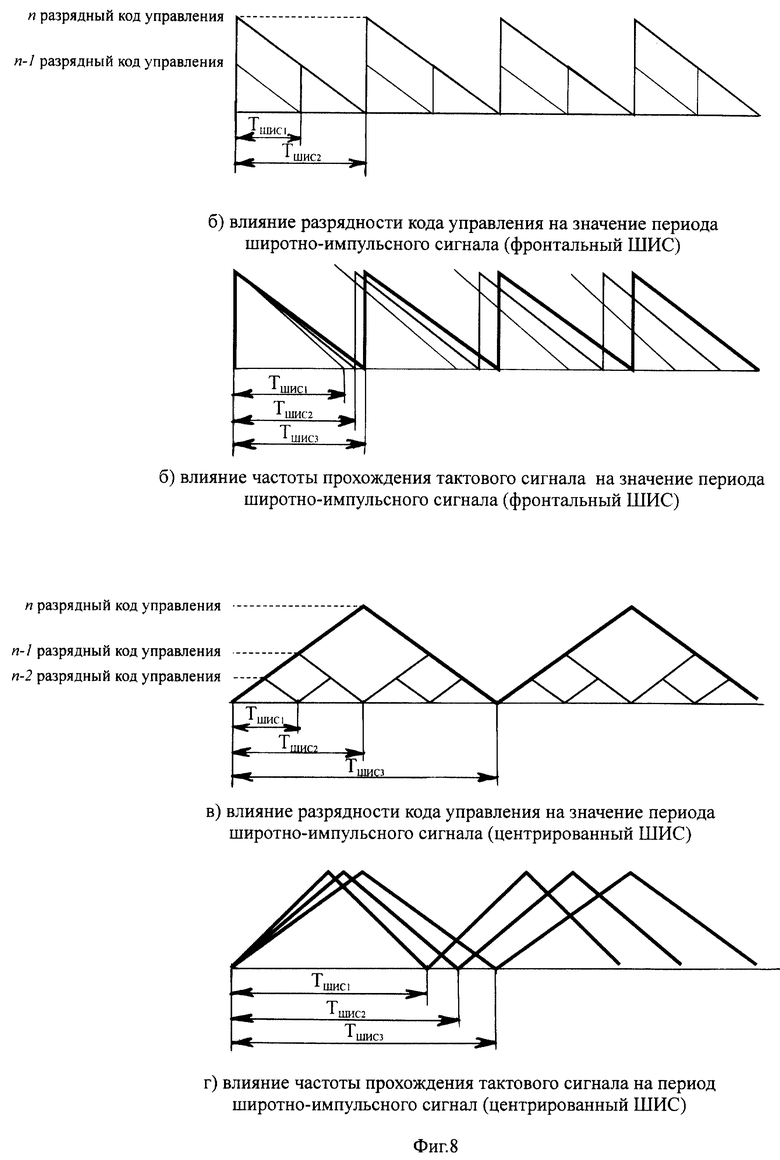
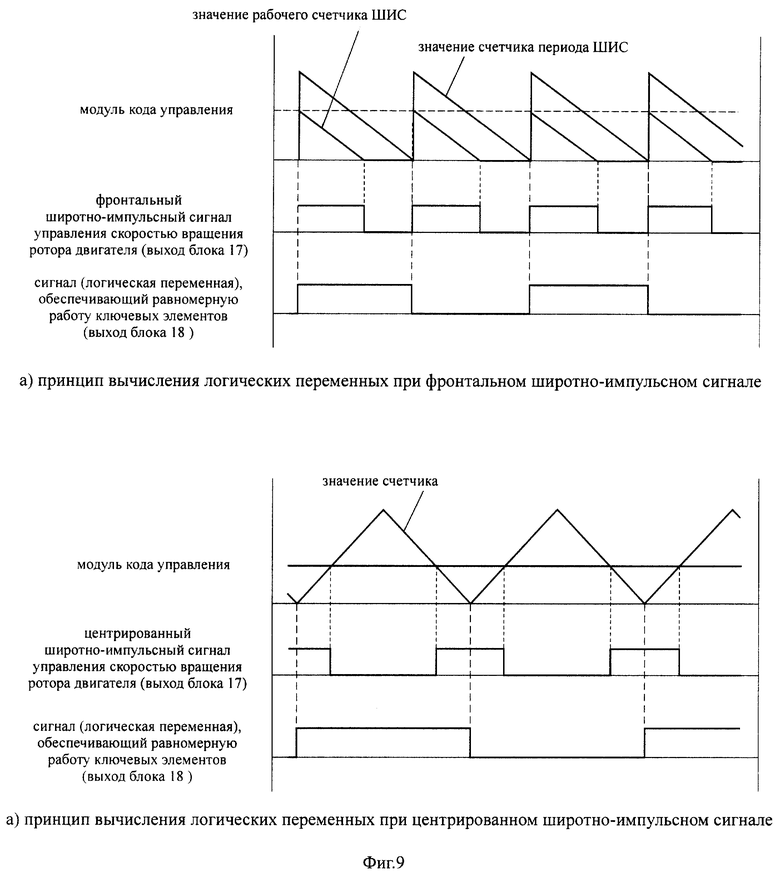
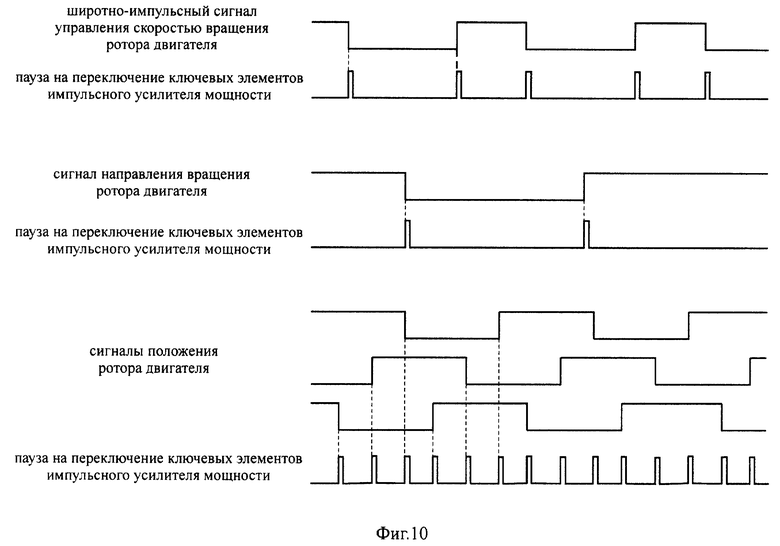
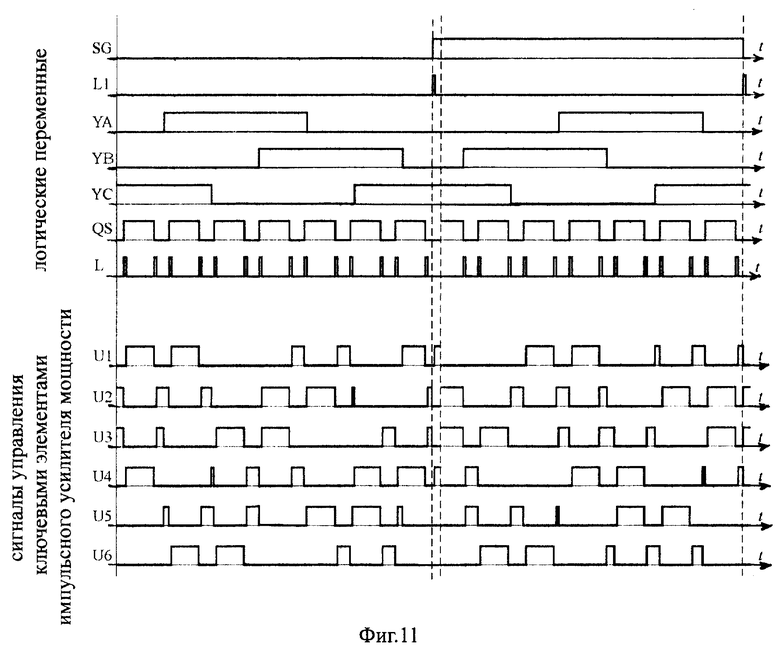
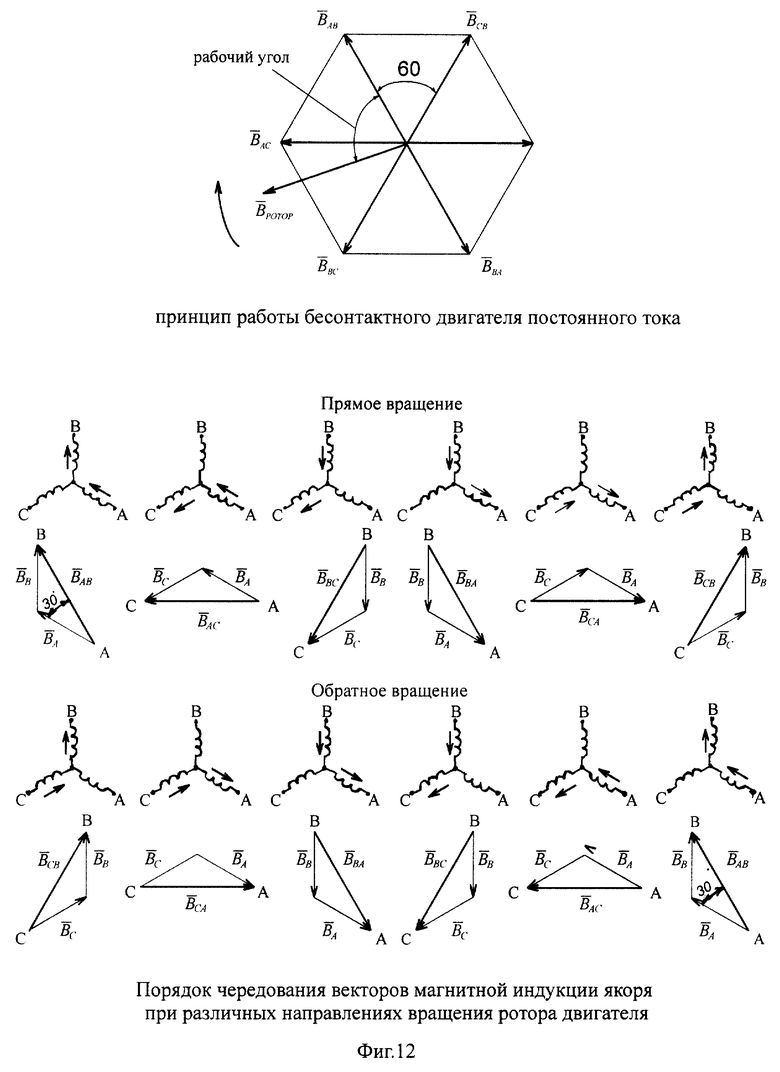
Функционирует схема следующим образом. Устройство управления 5 наряду с импульсным усилителем мощности 6, синхронным двигателем 13 и датчиком положения ротора 16 образует мехатронный модуль трехфазного бесконтактного двигателя постоянного тока (фиг.2). Импульсный усилитель мощности 6 подключен к источнику питания и состоит из трех стоек, на каждой из которых располагаются по два ключевых элемента (7, 8, 9, 10, 11, 12). Синхронный двигатель 13 состоит из статора 14, на котором размещается трехфазная обмотка, и ротора 15, на котором присутствует постоянный магнит. Таким образом, ротор 15 является индуктором, а статор 14 - якорем двигателя 13. Датчик положения ротора 16 состоит из трех датчиков Холла (17, 18, 19), которые размещаются друг относительно друга на угол, равный 120 электрическим (или геометрическим) градусам, и располагаются вблизи ротора 15 двигателя 13. Для обеспечения вращения ротора 15 двигателя 13 необходимо поддерживать угловую разницу между направлением вектора магнитной индукции якоря и направлением вектора магнитной индукции индуктора. Вектор магнитной индукции якоря создается током, протекающим по обмоткам статора 14 от плюса к минусу источника питания. Направление, по которому будет протекать ток, определяется открытыми ключевыми элементами (7, 8, 9, 10, 11, 12). Например, если открыты первый 7 и четвертый 10 ключевые элементы, то ток от плюса источника питания будет протекать через первый ключевой элемент 7, через первую обмотку статора А, через вторую обмотку статора В и через четвертый ключевой элемент 10 к минусу источника питания. Вектор магнитной индукции якоря является суммой векторов магнитной индукции каждой обмотки статора 14, по которой протекает ток. Направление вектора магнитной индукции обмотки статора определяется по правилу "буравчика". При использовании только двух (120-ти градусная коммутация) или только трех фаз (180-ти градусная коммутация) двигателя вектор магнитной индукции якоря будет дискретно поворачиваться на угол, равный 60-ти электрическим градусам (фиг.12). В том случае, если напротив датчика Холла (17, 18, 19) находится северный полюс магнита ротора 15, то на выходе датчика Холла (17, 18, 19) будет логическая единица. Если напротив датчика Холла (17, 18, 19) будет находиться южный полюс магнита ротора 15, то на выходе датчика Холла (17, 18, 19) будет логический ноль. С помощью трех датчиков Холла (17, 18, 19), которые фиксируют торцевые магнитные потоки ротора 15, можно определить направление вектора магнитной индукции ротора 15, и, тем самым, определить текущее положение ротора 15 двигателя 13 с точностью до 60 электрических градусов. На выходе датчиков Холла (17, 18, 19) присутствуют цифровые сигналы, которые поступают на вход устройства управления 5. Задачами устройства управления являются: обеспечение вращения ротора 15 двигателя 13 с заданной скоростью и в заданном направлении, равномерная загрузка ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 по току, исключение протекания сквозных токов в стойках импульсного усилителя мощности 6 и возможность регулирования добротности. Первая задача решается с помощью сигналов о положении ротора 15 двигателя 13 и сигнала кода управления. Сигналы о положении ротора 15 двигателя 13 и знака кода управления определяют какие ключевые элементы (7, 8, 9, 10, 11, 12) должны быть открыты, а сигнал модуля кода управления, преобразованный в широтно-импульсный сигнал управления, определяет как долго должны быть открыты эти ключевые элементы (7, 8, 9, 10, 11, 12) в течение одного периода широтно-импульсного сигнала. Таким образом, на одном периоде широтно-импульсного сигнала двигатель может находится как в двигательном режиме (логическая единица), так и в режиме торможения (логический ноль). Чем больше двигатель находится в двигательном режиме в течение периода широтно-импульсного сигнала, тем большую скорость он развивает. Равномерная загрузка ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 по току осуществляется при помощи поочередного торможения то верхними (7, 9, 11), то нижними (8, 10, 12) ключевыми элементами на соседних периодах широтно-импульсного сигнала. Сквозные токи возникают вследствие неравномерного включения и выключения транзисторов, которые могут быть ключевыми элементами (7, 8, 9, 10, 11, 12). Переключение транзисторов может быть следствием смены двигательного режима на режим торможение или, наоборот, с режима торможения на двигательный режим (изменение значения широтно-импульсного сигнала), изменения положения ротора 15 двигателя 13 (изменение значения сигналов о положении ротора 15 двигателя 13) и реверсирования вращения двигателя 13 на максимальной скорости (изменение сигнала знака кода управления при максимальном сигнале модуля кода управления). Исключение протекания сквозных токов в стойках импульсного усилителя мощности 6 осуществляется с помощью введения паузы на переключение ключевых элементов (7, 8, 9, 10, 11, 12), расположенных в одной стойке. Длительность паузы должна быть больше чем время рассасывания основных носителей в базе транзистоpa. Добротность устройства регулируется с помощью изменения периода широтно-импульсного сигнала управления, который является функцией разрядности модуля кода управления и времени поступления тактовых сигналов с генератора импульсов. Изменяя разрядность сигнала кода управления можно грубо регулировать добротность. Для плавного регулирования добротности необходимо изменять частоту следования тактовых сигналов. Для выполнения поставленных задач использовался цифровой способ управления угловой скоростью трехфазного бесконтактного двигателя постоянного тока. Для реализации способа управления задают тактовый сигнал с помощью генератора импульсов. Задают цифровой сигнал кода управления произвольной разрядности. Например, цифровой сигнал кода управления, разрядность которого равна 8 (состоит из восьми нулей и/или единиц), будет иметь следующий вид 110101012. При этом самый старший (левый) разряд считается знаком числа, а остальная часть - модулем числа. Т.е. знак равен 1, а модуль - 10101012. С помощью блока выделения сигналов модуля и знака 1 выделяют сигнал знака кода управления, который определяет направление вращения ротора 15 двигателя 13, и формируют сигнал модуля кода управления, который определяет скорость вращения ротора 15 двигателя 13. В блоке выделения сигналов модуля и знака 1 из цифрового сигнала кода управления выделяется самый старший (левый) разряд, который становится сигналом знака кода управления, и на основе значения сигнала знака кода управления формируется сигнал модуля кода управления. Например, если цифрой код управления представлен в форме прямого кода, то модуль проходит через блок выделения сигналов модуля и знака 1 без изменения (1.1010101-1.1010101), если в форме обратного кода, то при единичном значении сигнала знака кода управления инвертируются все разряды модуля (1.1010101-1.0101010), если в форме дополнительного кода, то при единичном значении сигнала знака кода управления помимо инверсии всех разрядов модуля к значению модуля добавляется единица (1.1010101-1.0101011). Блок выделения сигналов модуля и знака 1 может быть реализован с помощью блока элементов "Исключающее ИЛИ", на первый вход элементов поступает сигнал знака кода управления, а на вторые входы элементов поступают соответствующие разряды модуля сигнала кода управления. Выходом блока элементов "Исключающее ИЛИ" является цифровой сигнал модуля кода управления. Приведенный пример справедлив в том случае, если код управления подается в виде обратного цифрового кода. Формирование широтно-импульсного сигнала управления угловой скоростью вращения ротора 15 двигателя 13 происходит на основе значения модуля кода управления в блоке преобразователя код-широтно-импульсный сигнал [2]. Блок преобразователя код-широтно-импульсный сигнал состоит из счетчика периода, счетчика работы и дополнительной логики. Время счета счетчика периода от максимально возможного значения (2n-1-1, где n - число разрядов кода управления) до нуля, определяет период широтно-импульсного сигнала управления. Т. е. при восьми разрядах сигнала кода управления период широтно-импульсного сигнала управления tШИС=127*tГИ, где tГИ - период тактового сигнала. Время счета счетчика работы от текущего значения цифрового сигнала модуля кода управления до нуля определяет единичное значение широтно-импульсного сигнала. Запись максимального значения в счетчик периода и сигнала модуля кода управления в счетчик работы происходит синхронно. Дополнительная логика реализуется с помощью блока сравнения с нулем (>0) и элемента "И", которые позволяют поддерживать нулевое состояние (значение) счетчика работы в случае не максимального цифрового сигнала модуля кода управления до тех пор, пока значение счетчика периода не станет равным нулю. Т.е. начнется новый период широтно-импульсного сигнала и произойдет запись нового значения цифрового сигнала модуля кода управления в счетчик работы. Иллюстрация работы преобразователя код-широтно-импульсный сигнал представлена на фиг.6. Измерение сигналов о положении ротора 15 двигателя 13 осуществляется с помощью датчиков Холла (17, 18, 19), выходами которых являются цифровые сигналы. Формирование сигналов управления ключевыми элементами (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 осуществляется на основе сигналов о положении ротора 15 двигателя 13, сигнала знака кода управления и широтно-импульсного сигнала управления скоростью вращения ротора 15 двигателя 13 с помощью временных диаграмм (фиг.7). На временных диаграммах изображены сформированные и измеренные сигналы и сигналы управления ключевыми элементами (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 в функции сформированных и измеренных сигналов. Например, если значение сигнала знака кода управления равно нулю, сигналов о положении ротора 15 двигателя 13 - один, ноль, один (сверху вниз) и значение широтно-импульсного сигнала управления скоростью вращения ротора 15 двигателя 13 - один, то сигналы управления ключевыми элементами (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 будут соответственно равны один, ноль, ноль, ноль, ноль, один (фиг.4). Формирование сигналов управления ключевыми элементами импульсного усилителя мощности может быть реализовано с помощью программируемых логических матриц и шести триггеров на выходе. Описание программируемых логических матриц приведено на стр. 358-366 [3] . Задают цифровой сигнал разрядности кода управления в виде двоичного числа, значение которого определяет максимальное значение счетчика периода 23 широтно-импульсного сигнала и количество разрядов сигнала модуля кода управления, используемых для формирования широтно-импульсного сигнала управления скоростью вращения ротора 15 двигателя 13. Например, сигнал разрядности кода управления является семиразрядным двоичным числом 00111112. Это означает, что максимальное значение счетчика периода 23 будет равно 111112 и будут использоваться пять младших (правых) разрядов сигнала модуля кода управления для формирования широтно-импульсного сигнала. Таким образом, скорректированный сигнал модуля кода управления будет равен 101012 (см. верхний пример для прямого цифрового кода). При максимальном значении разрядности модуля кода управления период фронтального широтно-импульсного сигнала равен 127*tГИ, а период центрированного широтно-импульсного сигнала равен 255*tГИ. Период фронтального широтно-импульсного сигнала будет изменяться дискретно с шагом 2n-1, где n - разрядность кода управления (фиг.8.а) При использовании центрированного широтно-импульсного сигнала период будет изменяться с шагом 2*2n-1 (фиг.8.в). Коррекцию сигнала модуля кода управления можно реализовать с помощью блока элементов "И" 20. На первый вход блока элементов "И" поступает сигнал разрядности кода управления, а на второй вход - сигнал модуля кода управления. Задают цифровой сигнал частоты прохождения тактового сигнала в виде двоичного числа, который определяет по какому тактовому сигналу будет меняться содержимое счетчика периода 23. Например, значение четырехразрядного цифрового сигнала частоты прохождения тактового сигнала равно 10102. Это означает, что значение счетчика периода 23 изменяется на единицу при прохождении каждого десятого импульса с генератора импульсов. При значении цифрового сигнала частоты прохождения тактового сигнала 10012 проходит каждый девятый импульс (фиг.8.б,г). Прохождение каждого n-го тактового сигнала может быть реализовано с помощью делителя частоты 21, выход которого является тактовым сигналом счетчика периода 23 и счетчика работы 22. Изменение цифрового сигнала разрядности модуля кода управления позволяет грубо регулировать добротность системы, в то время как изменение цифрового сигнала частоты прохождения тактового сигнала позволяет плавно регулировать добротность системы. Таким образом, полная формула периода скорректированного широтно-импульсного сигнала имеет вид (2n-1-1)*(f)*tГИ, где f - частота прохождения тактового сигнала. Корректирование широтно-импульсного сигнала осуществляется на основе скорректированного периода широтно-импульсного сигнала и с помощью скорректированного сигнала модуля кода управления. В случае фронтального широтно-импульсного сигнала скорректированный сигнал модуля кода управления записывается в счетчик работы 22 (фиг.9.а). В случае центрированного широтно-импульсного сигнала значение скорректированного сигнала модуля кода управления сравнивается с текущим значением счетчика периода (фиг. 9.б). Корректирование широтно-импульсного сигнала управления скоростью вращения ротора 15 двигателя 13 можно реализовать с помощью блока элементов "И" 20, делителя частоты 21, счетчика работы 22, счетчика периода 23, первого блока сравнения с нулем (>0) 24, второго блока сравнения с нулем (=0) 25 и первого элемента "И" 26. Выход второго блока сравнения с нулем (=0) 25 является сигналом разрешения записи скорректированного сигнала модуля кода управления в счетчик работы 22 и сигнала разрядности кода управления в счетчик периода 23. Формирование сигнала обеспечения равномерной работы ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 происходит на основе данных, поступающих с счетчика периода 23. При достижении нулевого значения счетчика периода 23 значение сигнала обеспечения равномерной работы ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 инвертируется, если значение цифрового сигнала модуля кода управления не равно нулю (фиг.9). Формирование сигнала равномерной работы ключевых элементов импульсного усилителя мощности можно реализовать с помощью третьего блока сравнения с нулем (>0) 27 второго элемента "И" 28 и первого триггера 29, а также блока элементов "И", делителя частоты 21, счетчика периода 23 и второго блока сравнения с нулем (=0) 25. Задают цифровой сигнал (кода) длительности паузы на переключение ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 в виде двоичного числа, значение которого определяет сколько импульсов с генератора импульсов сигнал паузы будет находится в активном состоянии (логическая "единица"). Введение сигналов паузы на переключение ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 позволяет исключить протекание сквозных токов в стойках импульсного усилителя мощности 6. Формирование сигналов паузы происходит на основе сигнала знака кода управления, широтно-импульсного сигнала и сигналов с датчика положения ротора 16. Первый сигнал паузы становится активным в том случае, если произошло изменение сигнала знака кода управления и значение сигнала длительности паузы не равно нулю (фиг.10). Первый сигнал паузы можно реализовать с помощью второго триггера 30, первого элемента "Исключающее ИЛИ" 31, первого счетчика 32, четвертого блока сравнения с нулем (>0) 33 и третьего элемента "И" 34. С помощью второго триггера 30 осуществляется хранение предыдущего значения сигнала знака кода управления. Первый элемент "Исключающее ИЛИ" 31 позволяет фиксировать изменение значения сигнала знака кода управления. При изменении значения сигнала знака кода управления на выходе первого элемента "Исключающее ИЛИ" 31 будет логическая единица, которая разрешает запись сигнала длительности паузы на переключение ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 в первый счетчик 32, активизируя, тем самым, работу первого счетчика 32. Во время работы первого счетчика 32 (пока его значение не станет равным нулю) на выходе четвертого блока сравнения с нулем (>0) 33 будет логическая единица, которая, поступая на один из входов третьего элемента "И" 34, разрешает проход тактового сигнала, поступающего с генератора импульсов на тактовый вход первого счетчика 32. Выходом четвертого блока сравнения с нулем (>0) 33 является первый сигнал паузы на переключение ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6. При появлении нуля на выходе первого счетчика 32 четвертый блок сравнения с нулем (>0) 33 формирует логический ноль, на основе которого с помощью третьего элемента "И" 34 блокируется подача тактового сигнала на тактовый вход первого счетчика 32. Следующая активизация работы первого счетчика 32 может произойти только при изменении значения сигнала знака кода управления. Второй сигнал паузы становится активным в том случае, если изменилось значение широтно-импульсного сигнала управления угловой скоростью ротора 15 двигателя 13 и значение сигнала длительности паузы не равно нулю (фиг.10). Второй сигнал паузы можно реализовать с помощью третьего триггера 35, второго элемента "Исключающее ИЛИ" 36, второго счетчика 37, пятого блока сравнения с нулем (>0) 38 и четвертого элемента "И" 39. С помощью третьего триггера 35 осуществляется хранение предыдущего значения широтно-импульсного сигнала управления угловой скоростью вращения ротора 15 двигателя 13. Второй элемент "Исключающее ИЛИ" 36 позволяет фиксировать изменение значения широтно-импульсного сигнала управления угловой скоростью вращения ротора 15 двигателя 13. При изменении значения широтно-импульсного сигнала управления угловой скоростью вращения ротора 15 двигателя 13 на выходе второго элемента "Исключающее ИЛИ" 36 будет логическая единица, которая разрешает запись сигнала длительности паузы на переключение ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 во второй счетчик 37, активизируя, тем самым, работу второго счетчика 37. Во время работы второго счетчика 37 (пока его значение не станет равным нулю) на выходе пятого блока сравнения с нулем (>0) 38 будет логическая единица, которая, поступая на один из входов четвертого элемента "И" 39, разрешает проход тактового сигнала, поступающего с генератора импульсов на тактовый вход второго счетчика 37. Выходом пятого блока сравнения с нулем (>0) 38 является второй сигнал паузы на переключение ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6. При появлении нуля на выходе второго счетчика 37 пятый блок сравнения с нулем (>0) 38 формирует логический ноль, на основе которого с помощью четвертого элемента "И" 39 блокируется подача тактового сигнала на тактовый вход второго счетчика 37. Следующее инициирование работы второго счетчика 37 может произойти только при изменении значения широтно-импульсного сигнала управления скоростью вращения ротора 15 двигателя 13. Третий сигнал паузы становится активным в том случае, если произошло изменение любого сигнала о положении ротора 15 двигателя 13 и значение сигнала длительности паузы не равно нулю (фиг.10). Третий сигнал паузы может быть реализован с помощью четвертого триггера 40, третьего элемента "Исключающее ИЛИ" 41, пятого триггера 42, четвертого элемента "Исключающее ИЛИ" 43, шестого триггера 44, пятого элемента "Исключающее ИЛИ" 45, элемента "ИЛИ" 46, третьего счетчика 47, шестого блока сравнения с нулем (>0) 48 и пятого элемента "И" 49. При помощи четвертого триггера 40 и третьего элемента "Исключающее ИЛИ" 41 определяется произошло ли изменение значения первого сигнала с датчика положения ротора 16. При помощи пятого триггера 42 и четвертого элемента "Исключающее ИЛИ" 43 определяется произошло ли изменение значения второго сигнала с датчика положения ротора 16. При помощи шестого триггера 44 и пятого элемента "Исключающее ИЛИ" 45 определяется произошло ли изменение значения третьего сигнала с датчика положения ротора 16. Элемент "ИЛИ" 46 введен для объединения сигналов, определяющих изменение значения сигнала знака кода управления, широтно-импульсного сигнала управления угловой скоростью вращения ротора 15 двигателя 13 и сигналов о положении ротора 15 двигателя 13, в один сигнал разрешения загрузки сигнала длительности паузы на переключение ключевых элементов импульсного усилителя мощности в третий счетчик 47. Таким образом, при изменении любого сигнала, поступающего с датчика положения ротора 16, будет инициирована работа третьего счетчика 47. Во время работы третьего счетчика 47 (пока его значение не станет равным нулю) на выходе шестого блока сравнения с нулем (>0) 48 будет присутствовать логическая единица, которая, поступая на один из входов пятого элемента "И" 49, разрешает проход тактового сигнала, поступающего с генератора импульсов на тактовый вход третьего счетчика 47. Выходом шестого блока сравнения с нулем (>0) 48 является третий сигнал паузы на переключение ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6. При появлении нуля на выходе третьего счетчика 47 шестой блок сравнения с нулем (>0) 48 формирует логический ноль, на основе которого с помощью пятого элемента "И" 49 блокируется подача тактового сигнала на тактовый вход третьего счетчика 47. Корректирование сигналов управления ключевыми элементами (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 происходит на основе сигналов о положении ротора 15 двигателя 13, поступающих с датчика положения ротора 16, сигнала знака кода управления, скорректированного широтно-импульсного сигнала управления скоростью вращения ротора 15 двигателя 13, сформированных сигналов паузы на переключение ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 и сформированного сигнала обеспечения равномерной работы ключевых элементов (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 с помощью временной диаграммы. На фиг.11 изображена временная диаграмма, которая отражает частый случай скорректированных сигналов управления ключевыми элементами (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 (фиг.8). Блок формирования сигналов управления ключевыми элементами (7, 8, 9, 10, 11, 12) импульсного усилителя мощности 6 может быть реализован с помощью программируемой логической матрицы (50) и шести триггеров (51, 52, 53, 54, 55, 56) на выходе.
Литература
1. Силовые системы парашютируемыми объектами: Учебное пособие /В.И. Толмачев, А.Н. Геращенко, В.В. Глазунов, Б.Н. Попов; Под ред. В.И. Толмачева. - М.: Изд-во МАИ, 1995. - 168 с.: ил.
2. Попов Б.Н. Цифровые устройства следящих приводов ЛА: Учебное пособие. - М.: Изд-во МАИ, 1992. - 76 с.: ил.
3. Угрюмов Е. П. Цифровая схемотехника - СПб.: БХВ - Санкт-Петербург, 2000. - 528 с.: ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦИФРОВОГО УПРАВЛЕНИЯ УГЛОВОЙ СКОРОСТЬЮ ТРЕХФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ С УЧЕТОМ ЗНАКА ПРОТИВО-ЭДС | 2010 |
|
RU2438158C1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Вентильный электродвигатель | 1980 |
|
SU964882A1 |
| Цифровой электропривод | 1982 |
|
SU1050077A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВОЙНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2037263C1 |
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
Способ цифрового управления угловой скоростью трехфазного бесконтактного двигателя постоянного тока для повышения надежности управления заключается в том, что задают цифровые сигналы разрядности кода управления и частоты прохождения тактового сигнала, на основе которых с учетом сигнала модуля кода управления и тактового сигнала корректируют широтно-импульсный сигнал управления угловой скоростью вращения ротора двигателя. 12 ил.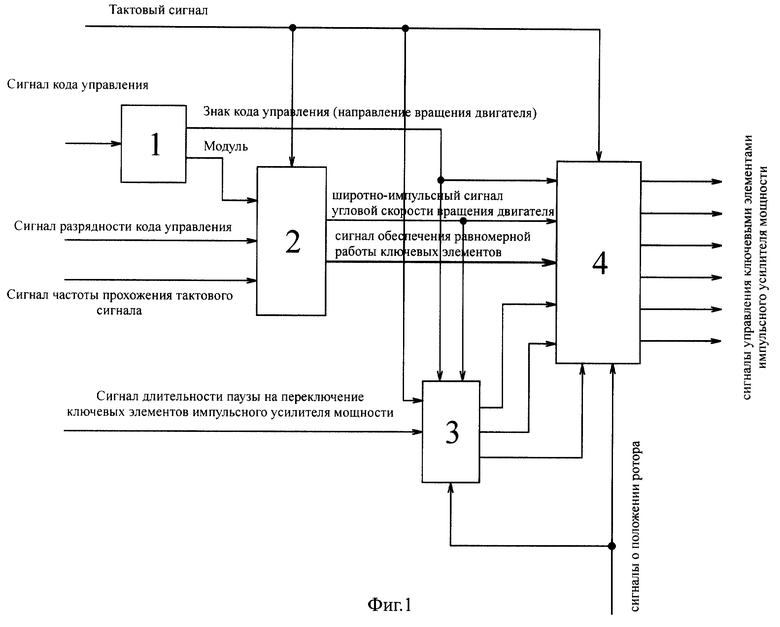
Способ цифрового управления скоростью трехфазного бесконтактного двигателя постоянного тока, заключающийся в том, что задают тактовый сигнал, задают цифровой сигнал кода управления, на основе которого формируют сигналы модуля и знака кода управления, формируют широтно-импульсный сигнал управления угловой скоростью вращения ротора двигателя в функции сигнала модуля кода управления и тактового сигнала, измеряют сигналы о положении ротора двигателя, на основе которых с учетом широтно-импульсного сигнала управления угловой скоростью вращения ротора двигателя, знака кода управления и тактового сигнала формируют сигналы управления ключевыми элементами импульсного усилителя мощности, отличающийся тем, что задают цифровые сигналы разрядности кода управления и частоты прохождения тактового сигнала, на основе которых с учетом сигнала модуля кода управления и тактового сигнала корректируют широтно-импульсный сигнал управления угловой скоростью вращения ротора двигателя и формируют сигнал обеспечения равномерной работы ключевых элементов импульсного усилителя мощности, задают цифровой сигнал длительности паузы на переключение ключевых элементов импульсного усилителя мощности, на основе которого с учетом сигналов о положении ротора двигателя, сигнала знака кода управления, широтно-импульсного сигнала управления угловой скоростью вращения ротора двигателя и тактового сигнала формируют три сигнала паузы на переключение ключевых элементов импульсного усилителя мощности, на основе которых с учетом сигналов о положении ротора двигателя, сигнала знака кода управления, широтно-импульсного сигнала управления угловой скоростью вращения ротора двигателя, сигнала обеспечения равномерной работы ключевых элементов импульсного усилителя мощности и тактового сигнала корректируют сигналы управления ключевыми элементами импульсного усилителя мощности.
| ТОЛМАЧЕВ В.И., ГЕРАЩЕНКО А.Н., ГЛАЗУНОВ В.В., ПОПОВ Б.Н | |||
| Силовые системы парашютируемыми объектами: Учебное пособие /Под ред | |||
| В.И.ТОЛМАЧЕВА | |||
| - М.: МАИ, 1995, с.168 | |||
| СПОСОБ ПОЛУЧЕНИЯ ФРАКЦИИ АРОМАТИЧЕСКИХ УГЛЕВОДОРОДОВ C-C | 1992 |
|
RU2032652C1 |
| US 4558415 A, 10.12.1985 | |||
| СПОСОБ ПАПИЛЛОСФИНКТЕРОПЛАСТИКИ | 1999 |
|
RU2179412C2 |
| DE 2940317 A1, 12.06.1980. | |||

