//
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Промышленный робот | 1989 |
|
SU1684022A1 |
| Манипулятор | 1986 |
|
SU1323363A1 |
| Магнитный схват | 1990 |
|
SU1811484A3 |
| Привод исполнительного органа манипулятора | 1988 |
|
SU1548041A1 |
| СПОСОБ ОКРАШИВАНИЯ ПРЯДЕЙ ВОЛОС И ПРИСПОСОБЛЕНИЕ ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2018 |
|
RU2696574C1 |
| Рука робота | 1985 |
|
SU1284819A1 |
| КОМПЬЮТЕРНАЯ МЫШЬ | 2021 |
|
RU2786375C1 |
| Рука робота | 1987 |
|
SU1458202A1 |
| Магнитный схват | 1986 |
|
SU1430283A1 |
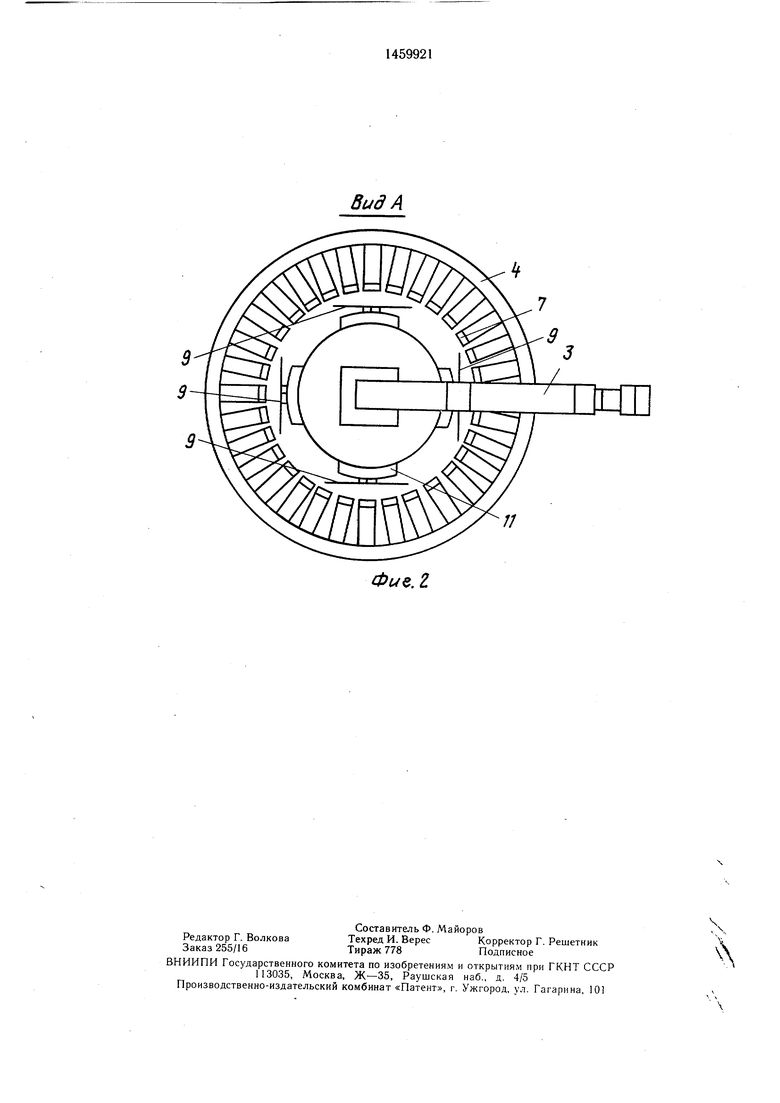
Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано при автоматизации технологических процессов в различных отраслях промышленности. Целью изобретения является улучшение динамических характе- ристик за счет уменьшения массы подвижных частей. Поворот механической руки 3 робота в горизонтальной плоскости осуществляется вместе с платформой 8 посредством привода 12. При этом последовательно или одновременно за счет переключения обмоток 6 полюсов магнитной системы, расположенной неподвижно на основании 1, может осушествляться переориентация руки 3 в -пространстве по другим координатам, так как роторы 9 электродвигателей ее прнводоп всегда находятся напротив полюсов, создающих магнитный поток, обеспечивающий их вращение. 2 з. п. ф-лы, 2 ил.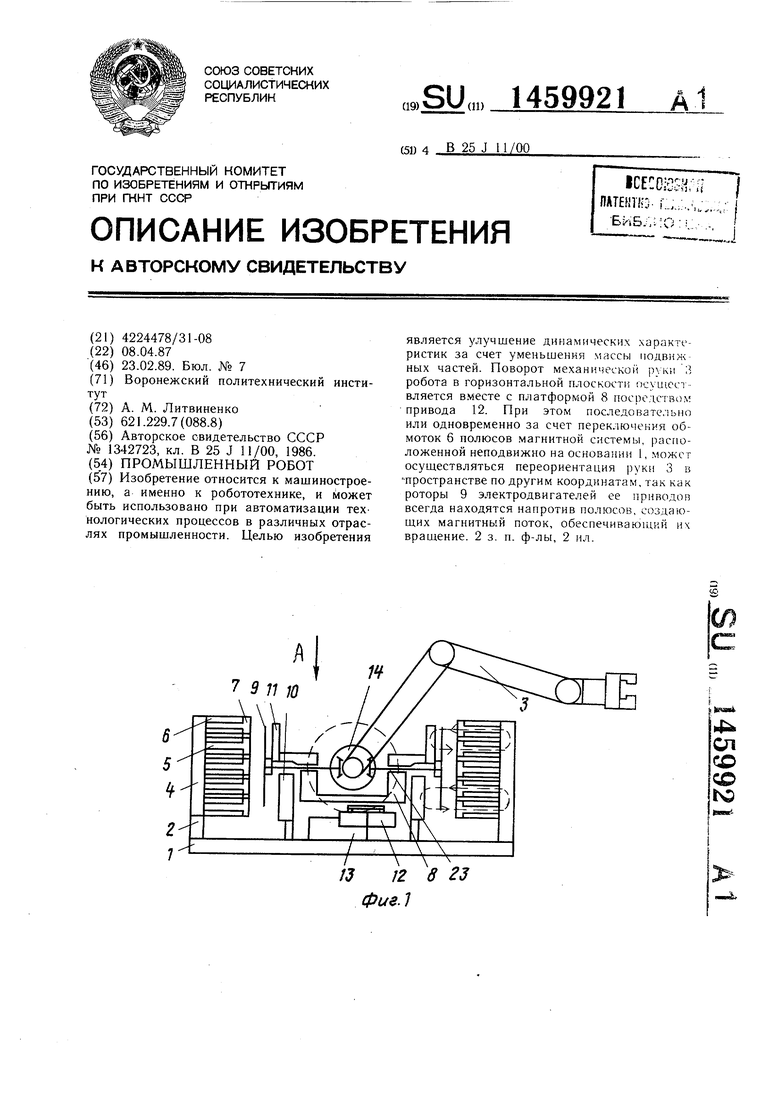
Фи,г
| Промышленный робот | 1986 |
|
SU1342723A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
