Робот содержит установленную на осно- ва|нии 1 платформу 2 с приводом ее вра- , включающим электродвигатель со ст|атором 3 и дисковым ротором 4, и редук- то|р 5. На платформе 2 расположена меха- ни|ческая рука 6, приводы перемещения ко- то|рой содержат электродвигатели включающие жестко связанные с основанием 1 ос|новную 7 и дополнительную 8 магнит- Hfcjie системы с кольцевыми воздушными за|зорами, в которых расположены дисковые риторы 9 электродвигателей. Основная 7 и дополнительная 8 магнитные системы уста- н4влены концентрично, а поверхности их полюсов, образующих воздушный зазор, расположены перпендикулярно оси вращения платформы 2. Роторы 9 электродвигателей установлены на платформе 2 и кинемати- 4tfcKH связаны через редукторы 10 с рукой 6, на которой установлен исполнительный орган 11.
Робот работает следующим образом.
Для перемещения исполнительного органа 11 в пространстве, подается ток в обмотку ротора 9 соответствующего элек- двигателя, который взаимодействуя с магнит15
Формула изобретения
Промышленный робот, содержащий установленную на основании с возможностью поворота платформу, на которой расположена механическая рука с приводами
0 ее перемещения, электродвигатели которых выполнены в виде жестко связанной с основанием основной магнитной системы, имеющей кольцевой воздушный зазор, и расположенных в этом зазоре роторов, установленных на платформе, отличающийся тем, что, с целью улучшения динамических характеристик путем уменьшения массы вращающихся частей, он снабжен жестко связанной с основанием дополнительной магнитной системой, имеющей кольцевой возQ душный зазор, расположенной концентрично основной магнитной системе, при этом поверхности полюсов магнитных систем, образующих кольцевой воздушный зазор, расположены перпендикулярно оси вращения платформы, а роторы электродвигателей
5 выполнены дисковыми и расположены в воздушных зазорах обеих магнитных систем.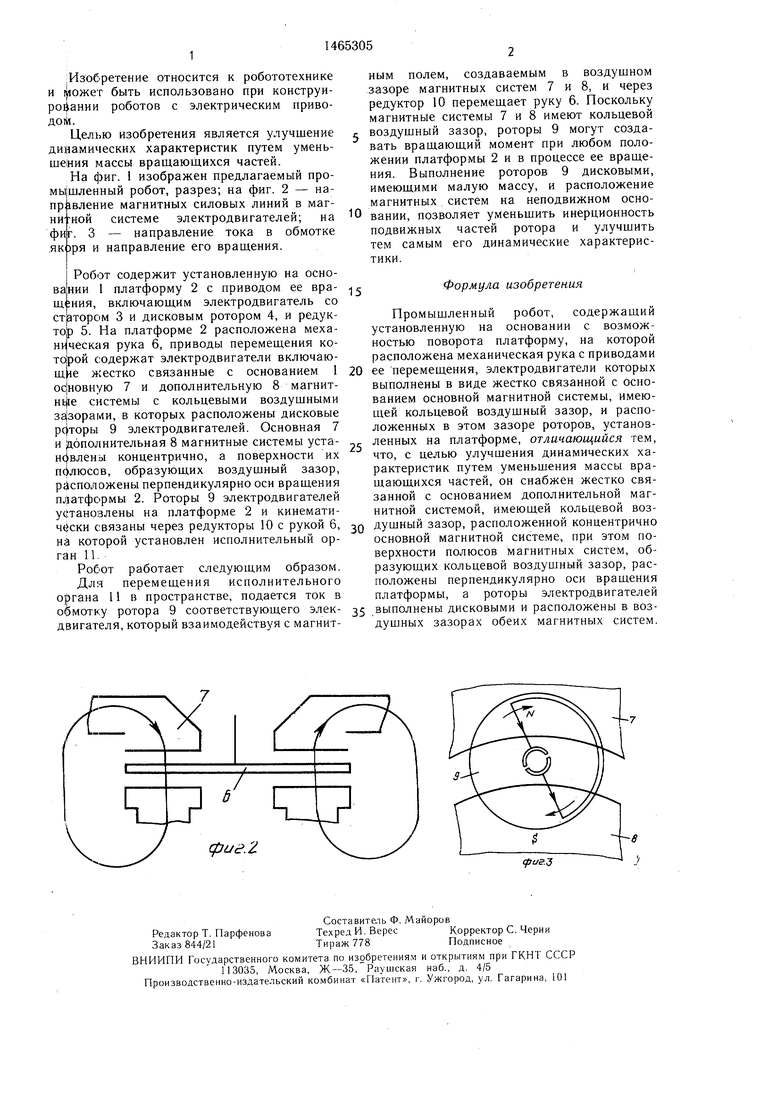
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2184028C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ОРБИТАЛЬНАЯ СИСТЕМА ТОРЦЕВОГО ТИПА | 2001 |
|
RU2184029C1 |
| Промышленный робот | 1986 |
|
SU1342723A1 |
| Робот промышленный | 2014 |
|
RU2634392C2 |
| Промышленный робот | 1987 |
|
SU1426781A1 |
| Промышленный робот | 1990 |
|
SU1722810A1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2005 |
|
RU2300456C1 |
| Привод исполнительного органа манипулятора | 1988 |
|
SU1548041A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
Изобретение относится к робототехнике и может быть использовано при конструировании роботов с электрическим приводом. Целью изобретения является улучшение динамических характеристик путем уменьшения массы вра1цаюш,ихся частей. Для перемеш,ения в пространстве исполнительного органа 11 подается ток в обмотку ротора 9 соответствуюш,его электродвигателя, который, взаимодействуя с магнитными полем, создаваемым в кольцевом воздушном зазоре магнитных систем 7 и 8, через редуктор 10 перемеш,ает руку 6. Выполнение роторов 9 дисковыми, имеюш,ими малую массу, и расположение магнитных систем на неподвижном основании позволяют улучшить динамические характеристики робота. 3 ил. 6П
У
фиг.2
| Промышленный робот | 1986 |
|
SU1342723A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
