Изобретение относится к электромеханике и может быть использовано в качестве электропривода широкого класса механизмов, например станков, химического оборудования, манипуляторов промышленных роботов, транспортной техники и т.п.
Известны электроприводы с внешними магнитными системами, описанные в [1] , в их числе находятся и электромеханические червячные приводы для робототехники, при этом используются преимущественно приводы с двигателями постоянного тока, якорь которого располагается в зазоре внешней магнитной системы, например, цилиндрического торцевого или линейного типа. Недостатком таких систем является наличие коллектора, что приводит к уменьшению надежности.
Наиболее близким к заявляемому по совокупности существенных признаков является роликовая червячная передача [2], в которой червяк привода выполнен в виде роликов, расположенных по окружности и установленных на опорах качения в корпусе, в котором установлена вращающаяся обойма. На роликах находятся круговые реечные зубья, смещенные на каждом ролике вдоль оси и образующие винтовую нарезку червяка.
Недостатком данного привода является малая нагрузочная способность, вызванная необходимостью использования только одного блока роликов с приводным двигателем, а также сложность конструкции, обусловленная наличием соединительного элемента (муфты) между блоком роликов и двигателем.
Изобретение направлено на увеличение нагрузочной способности при упрощении электромеханических узлов и обеспечении их унификации.
Это достигается тем, что электромеханический червячный привод снабжен двумя блоками роликов, каждый из которых установлен на одном валу с ротором, и шестью орбитальными электромеханическими системами, причем статоры четырех орбитальных электромеханических систем установлены с обеих сторон блоков роликов в зоне внутренних частей роторов, а между ними с каждой стороны установлены дополнительные два статора орбитальных электромеханических систем в зоне внешних частей роторов.
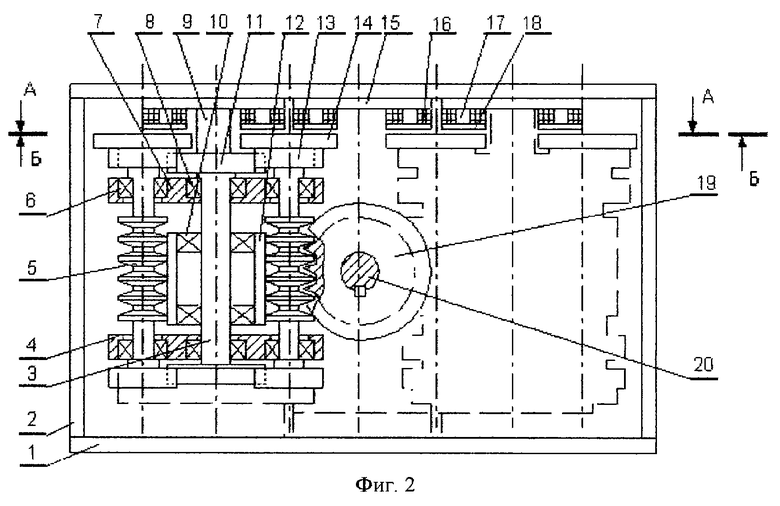
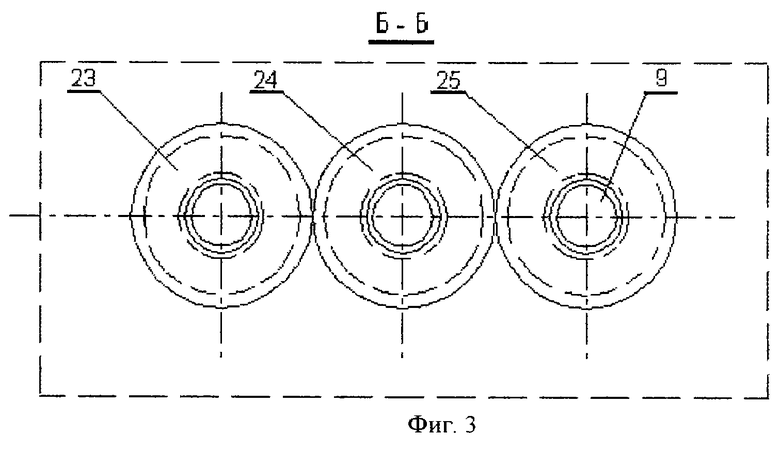
Сущность изобретения иллюстрируется чертежом, где на фиг.1 изображен разрез червячного привода горизонтальной плоскости, вид на роторный блок, на фиг. 2 изображен электромеханический червячный привод, вид спереди в разрезе по серединной вертикальной плоскости, на фиг.3 показан разрез червячного привода горизонтальной плоскости, вид на магнитные системы.
Электромеханический червячный привод включает в себя основание 1, две торцевые крышки 2, вал 3 составного блока вращающегося роликового червяка, который состоит из 4 валов, на которых накатаны ролики 5, валы 4 установлены в подшипниках 6, которые в свою очередь установлены в дисках 7, в них же на подшипниках 8 установлены валы 3 с выступом 9, прикрепленные к основанию 1. В средней части вала 3 установлены подшипники 10 поддерживающего элемента 12. На валу 3 в зоне выступа 9 также установлено неподвижное зубчатое колесо 11, которое находится во взаимодействии с зубчатыми колесами 13, которые установлены на валах 4 роликов. В торцевых зонах валов 4, примыкающих к колесам 13, установлены торцевые роторы 14. Орбитальные внешние магнитные системы 15 имеют обмотки 16 с сердечниками 17 и полюсными наконечниками 18. Зубчатое червячное колесо 19 установлено на валу 20. Блок роторов имеет внешние части 21, при этом роторы установлены в чередующемся порядке таким образом, что на половине валов роторы установлены сверху (см. фиг.2), а на второй половине снизу. Внешние части нижних роторов обозначены на фиг.1 позиций 22. На фиг. 3 схематично показано: орбитальный статор 23 внешней магнитной системы, установленный сверху во внутренней части левого (фиг.2) блока роликов, орбитальный статор 24, установленный между статорами внутренних частей одновременно во внешних частях роторов блока роликов, орбитальный статор 25 установлен сверху во внутренней части правого блока роликов. Вторая тройка статоров, аналогичных статорам 23, 24, 25, установлена в нижней части блоков роторов и на фиг.2 показана схематично.
Устройство работает следующим образом: при включении статоров 23, 24, 25 происходит следующее. Роторы 14 совершают два вида движения: собственное вращение совместно с колесом 13, которое, перекатываясь по центральному колесу 11, совершает циклоидное вращение относительно вала 3.
В результате блок роторов (составной червяк) совершает вращение, аналогичное вращению обычного червяка, но, в отличие от обычного червяка, трение вращения заменено на трение скольжения роликов 5 по зубьям червячного колеса 19. Поскольку наличествуют два блока роликов, усилия на подшипники червячного колеса 19 взаимно компенсируются.
При этом организовано эффективное электромеханическое взаимодействие статоров и роторов, а статоры унифицированы за счет установки их в зоне внутренних частей роторных блоков (два статора) и за счет установки третьего статора между ними во внешней части блока роторов.
И в том, и в другом случае момент вращения будет формироваться в шести подзонах всех шести статоров, которые объединены в три основные подзоны:
- статоры 23, взаимодействующие с внутренними частями левого блока роторов (фиг.2),
- статоры 25, взаимодействующие с правыми частями правого блока ротора,
- статоры 24, расположенные между вышеуказанными статорами в зоне внешних частей роторов.
Введение описанного расположения статоров и роторов дает возможность улучшить массогабаритные показатели привода за счет увеличения числа активных и увеличения тем самым активного момента. При этом обеспечивается унификация статоров.
Источники информации
1. Литвиненко А.М. Электроприводы промышленных роботов с внешними магнитными системами. - Воронеж: изд-во ВГУ, 1989. - 160 с., ил.
2. А. с. СССР 418653 /В.Г. Беляев и Л.П. Беляева. Роликовая червячная передача качения /F 16 H 25/22, опубл. БИ 9, 1974, з-ка 1755694/25-28 от 06.03.72.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2182534C1 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТОРЦЕВОГО ТИПА | 2001 |
|
RU2190518C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВИНТОВОЙ ПРИВОД | 2001 |
|
RU2190791C1 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА | 2001 |
|
RU2206954C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ОРБИТАЛЬНАЯ СИСТЕМА ТОРЦЕВОГО ТИПА | 2001 |
|
RU2184029C1 |
| ВОЛНОВОЙ ОРБИТАЛЬНЫЙ ПРИВОД | 2001 |
|
RU2213894C2 |
| ОРБИТАЛЬНЫЙ ШАГОВЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2215358C2 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2184028C1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2217856C2 |
Изобретение относится к орбитальным электроприводам промышленных роботов, работающих преимущественно в ангулярных системах координат и имеющих вращающееся основание, на котором закреплены роторы электродвигателя. Сущность изобретения в том, что оно направлено на увеличение нагрузочной способности при упрощении электромеханических узлов и обеспечении их унификации. Электромеханический червячный привод содержит два блока роликов и шесть орбитальных электромеханических систем. Роторы четырех электромеханических систем установлены поочередно с обеих сторон блоков роликов в зоне внутренних частей роторов, а между ними установлены дополнительные две орбитальные электромеханические системы в зоне внешних частей роторов. При этом достигается унификация торцевых статоров, что ведет к уменьшению стоимости данного устройства. 3 ил.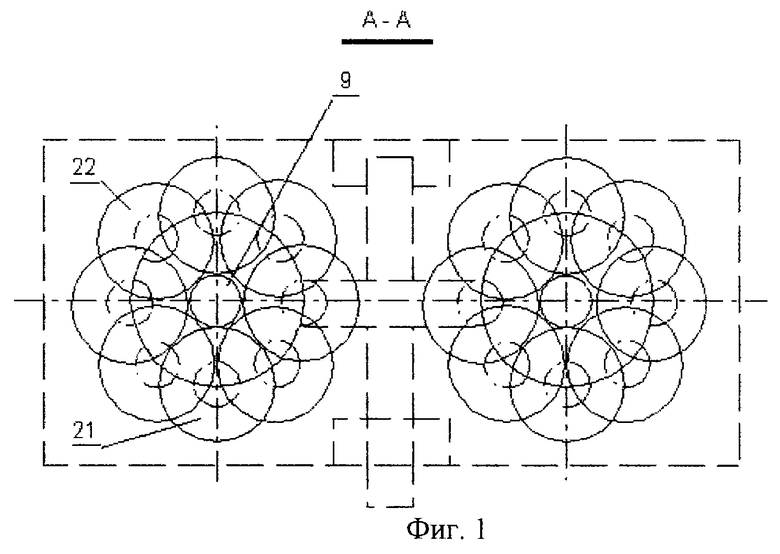
Электромеханический червячный привод, содержащий торцевые статоры и роторы, установленные на вращающемся основании, отличающийся тем, что он снабжен двумя блоками роликов, каждый из которых установлен на одном валу с ротором, и шестью орбитальными электромеханическими системами, причем статоры четырех орбитальных электромеханических систем установлены с обеих сторон блоков роликов в зоне внутренних частей роторов, а между ними с каждой стороны установлены дополнительные два статора орбитальных электромеханических систем в зоне внешних частей роторов.
| RU 93036473 А, 20.12.1996 | |||
| РОЛИКОВАЯ ЧЕРВЯЧНАЯ ПЕРЕДАЧА КАЧЕНИЯ | 1972 |
|
SU418653A1 |
| ЛИТВИНЕНКО А.М | |||
| Электроприводы промышленных роботов с внешними магнитными системами | |||
| - Воронеж: издательство ВГУ, 1989, с.160. | |||

