Изобретение относится к орбитальным электромеханическим системам (ОС), т. е. многофункциональным, многороторным, многокоординатным электромеханическим преобразователям, имеющим общую магнитную систему, преимущественно цилиндрического типа, и ряд роторов, оси которых разнесены по образующим замкнутой цилиндрической поверхности (орбите), при этом роторы имеют возможность совершать как минимум два движения - вращение вокруг собственной оси и орбитальное перемещение по круговой траектории относительно общего центра. Данные орбитальные электромеханические системы применяются для электропроводов промышленных роботов, поскольку позволяют уменьшить массу и габариты подвижной части (платформы) в манипуляторе.
Известна орбитальная электромеханическая система промышленных роботов, имеющая модульный торцевой цилиндрический индуктор (статор), внутри статора расположены диски роторов приводных двигателей [1]. Недостатком такой системы является увеличенный размер воздушного зазора. Это обусловлено наличием кривизны у цилиндрического статора, которая естественно не совпадает с плоскостью роторов. Кроме этого, недостатком является наличие только одного статора, что приводит к необходимости установки замыкающих магнитопроводов на вращающейся платформе.
Наиболее близким к заявляемой по совокупности существенных признаков является орбитальная электромеханическая система мотор-редуктор, которая содержит две тормозные системы - внутреннюю и внешнюю [2].
В состав системы входят роликовые или шариковые подшипники с телами качения. Недостатком данной системы является наличие редуктора, что усложняет конструкцию, понижает надежность, увеличивает массу и габариты.
Изобретение направлено на упрощение конструкции, повышение надежности, уменьшение массы и габаритов при предельной простоте механической части.
Это достигается тем, что орбитальная электромеханическая система снабжена внутренним статором с обмоткой, указанные внешний и внутренний статоры выполнены торцевыми, тела качения подшипника через являющиеся входными валы соединены с роторами, выполненными дисковыми и расположенными в одной плоскости, при этом периферийные части дисковых роторов находятся в зоне внешнего торцевого статора, а внутренние части роторов - в зоне внутреннего торцевого статора, при подаче напряжения в обмотки указанных торцевых статоров в воздушном зазоре возникают вращающиеся магнитные поля противоположного направления.
Достижение технического результата достигается за счет того, что тела качения подшипника являются одновременно входными валами редуктора.
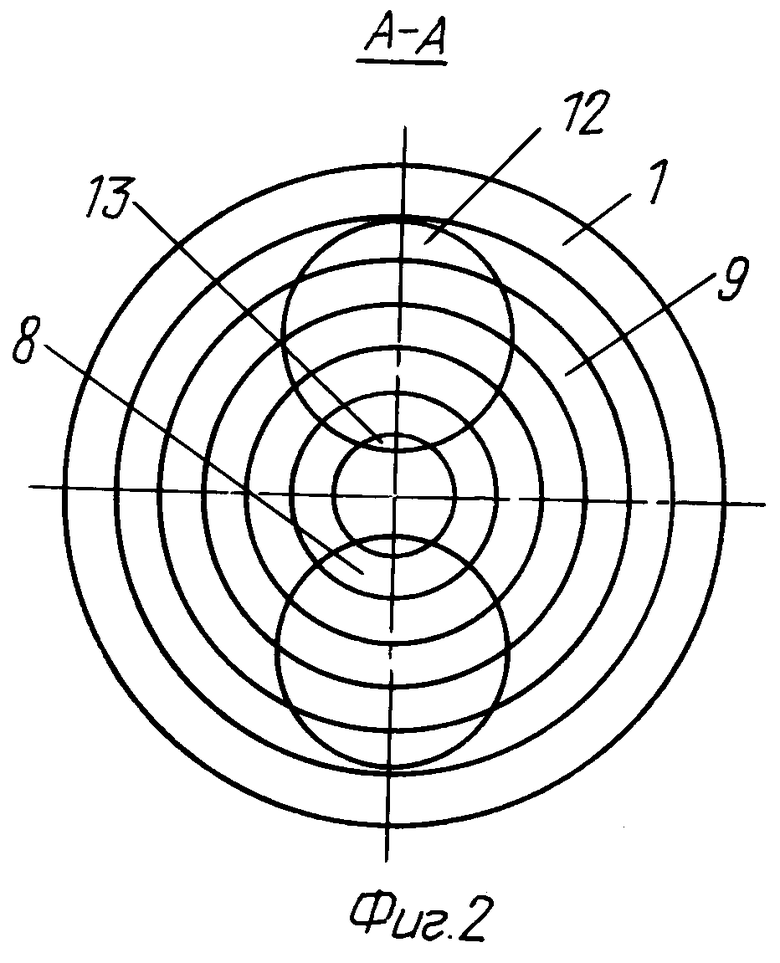
Сущность изобретения иллюстрируется чертежами, где на фиг.1 изображен разрез в вертикально-диаметральной плоскости системы орбитальной электромеханической, на фиг.2 - разрез данной орбитальной электромеханической системы в плоскости воздушного зазора, вид на торцевые статоры.
Орбитальная электромеханическая система имеет корпус 1, в корпусе установлено неподвижное кольцо 2, подшипник качения, на чертеже показан конусный подшипник, хотя может быть и использован подшипник с цилиндрическими роликами. Подшипник имеет внутреннее вращающееся кольцо 3, в которое запрессован выходной вал 4. Тела качения (ролики) 5 через короткие валы 6 соединены с дисковыми роторами 7, которые в простейшем случае представляют собой алюминиевые диски, для улучшения характеристик может быть введен активный слой в виде ферромагнитных тел, запрессованных в диски. Имеется также внутренний торцевой статор 8 с обмоткой, внешний торцевой статор 9 с обмоткой, коробка выводов 10. Торцевые статоры установлены на задней крышке 11 корпуса. Внешний торцевой статор 9 установлен в зоне периферийных частей 12 роторов 7, а статор 8 установлен в зоне внутренних частей 13 дисковых роторов 7.
Устройство работает следующим образом. При подаче напряжения на обмотки торцевых статоров 8 и 9 в воздушном зазоре возникает вращающееся электромагнитное поле, при этом направление вращения полей торцевых статоров 8 и 9 противоположное.
Под воздействием этих полей периферийные части дисковых роторов 7 испытывают тяговые усилия одного направления, а внутренние части дисковых роторов 7 - тяговые усилия противоположного направления. В результате дисковые роторы 7 совместно с телами качениями 5 совершают сложное вращательное движение, состоящее из двух - собственного вращения и орбитального перемещения внутри неподвижного кольца 2. При этом фрикционный контакт с подвижным кольцом 3 приводит к тому, что кольцо 3 вращается совместно с валом 4 со скоростью меньше, чем скорость собственного вращения ротора 7. Это уменьшение обусловлено разностью диаметров тел качения 5 и колец 2 и 3.
Введение описанных конструктивных схем механической, роторной и статорной систем позволяет улучшить массогабаритные показатели за счет исключения редуктора из состава привода и возложения его функции на опорный подшипник.
Источники информации
1. А.с. СССР 1459921, В 25 j 11/00, 1989.
2. Патент РФ 2071631, Н 02 К 41/06, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2182534C1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2217856C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ОРБИТАЛЬНАЯ СИСТЕМА ТОРЦЕВОГО ТИПА | 2001 |
|
RU2184029C1 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2184028C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЧЕРВЯЧНЫЙ ПРИВОД | 2001 |
|
RU2204068C2 |
| ОРБИТАЛЬНЫЙ ШАГОВЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2215358C2 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТОРЦЕВОГО ТИПА | 2001 |
|
RU2190518C1 |
| ВОЛНОВОЙ ОРБИТАЛЬНЫЙ ПРИВОД | 2001 |
|
RU2213894C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВИНТОВОЙ ПРИВОД | 2001 |
|
RU2190791C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
Использование: в качестве привода широкого применения редукторного типа. Орбитальная электромеханическая система содержит торцевые статоры, роторы и опорный подшипниковый элемент с телами вращения. Каждое из тел вращения, расположенных между подвижным и неподвижным кольцами, снабжено дисковым ротором. Роторы расположены в одной плоскости. Периферийные части роторов находятся в зоне внешнего торцевого кольцевого статора, а внутренние части роторов - в зоне внутреннего торцевого кольцевого статора. Технический результат заключается в улучшении массогабаритных показателей за счет исключения редуктора из состава привода и возложения его функции на опорный подшипник. 2 ил.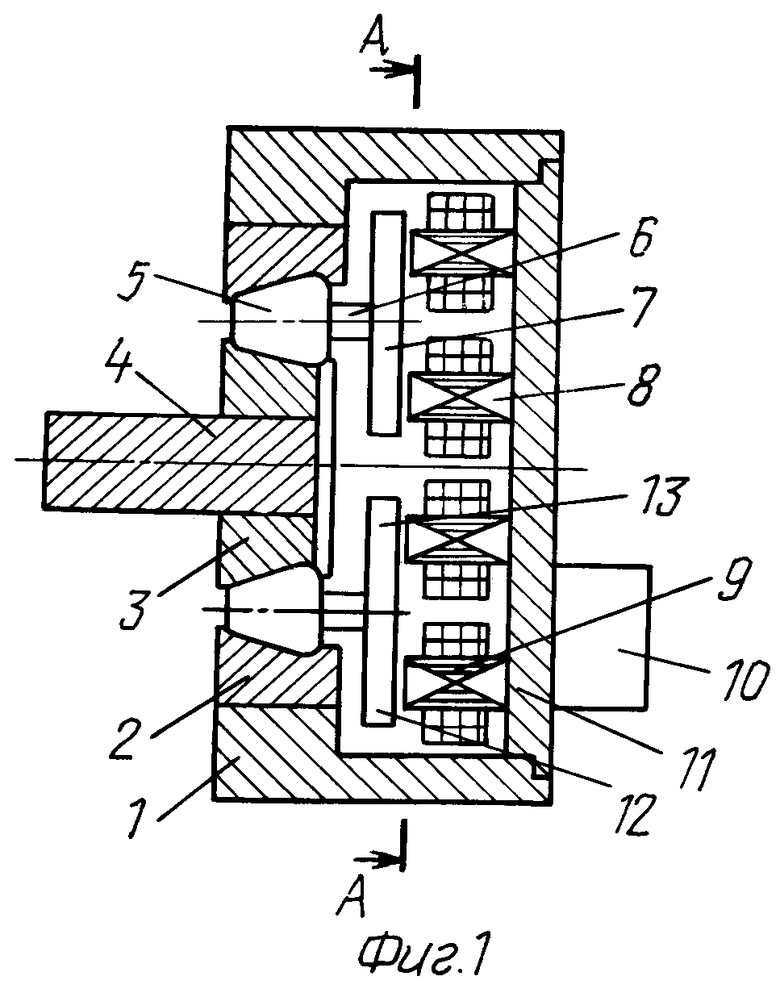
Орбитальная электромеханическая система, содержащая корпус, в котором установлено неподвижное кольцо подшипника с телами качения, во внутреннее вращающееся кольцо которого запрессован выходной вал, внешний статор с обмоткой, роторы, отличающаяся тем, что она снабжена внутренним статором с обмоткой, указанные внешний и внутренний статоры выполнены торцевыми, тела качения подшипника через являющиеся входными валы соединены с роторами, выполненными дисковыми и расположенными в одной плоскости, при этом периферийные части дисковых роторов находятся в зоне внешнего торцевого статора, а внутренние части роторов - в зоне внутреннего торцевого статора, при подаче напряжения в обмотки указанных торцевых статоров в воздушном зазоре возникают вращающиеся магнитные поля противоположного направления.
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 1994 |
|
RU2071631C1 |
| МОТОР-РЕДУКТОР | 1994 |
|
RU2074490C1 |
| Планетарный привод | 1990 |
|
SU1754990A1 |
| US 4951518 A, 28.08.1990. | |||

