Изобретение относится к дорожно-строительным машинам, а также может быть использовано в тракторах, кранах, самоходных шасси и т.д.
Известна система управления движением по курсу двухгусеничной машины по а.с. 1379143, 1987 г.
Основным недостатком этой системы управления является то, что из-за наличия шарнирной системы управления производительностью насосов привода хода невозможно осуществлять плавное изменение производительности насосов, т.к. зазоры в шарнирах и сама система тяг не обеспечивает в итоге плавный разворот машины, что сказывается на качестве дорожного полотна.
Целью предлагаемого изобретения является создание системы управления, обеспечивающей плавный поворот машины.
Указанная цель достигается тем, что в системе управления движением по курсу двухгусеничной машины, содержащей насосы переменной производительности, сообщенные с левым и правым гидромоторами привода хода и связанные с последними левый и правый гусеничные движители, система управления производительностью насосов выполнена в виде рулевого механизма управления, соединенного с блоком управления, состоящим из двух гидрораспределителей, посредством двух рычагов, связанных с гайками, а гайки расположены на двух валиках, кинематически связанных между собой двумя шестернями, причем кронштейн рулевого механизма жестко закреплен, а кронштейн блока управления установлен с возможностью поворота.
В системе управления движением по курсу двухгусеничной машины, содержащей насосы переменной производительности, сообщенные с левым и правым гидромоторами привода хода и связанные с последними левый и правый гусеничные движители, система управления производительностью насосов выполнена в виде рулевого механизма управления, соединенного с блоком управления, состоящим из двух гидрораспределителей, посредством двух рычагов, связанных с гайками, а гайки расположены на двух валиках, кинематически связанных между собой двумя шестернями, причем кронштейн блока управления жестко закреплен,а кронштейн рулевого механизма установлен с возможностью поворота.
Изобретение поясняется чертежами:
на фиг. 1 - общая схема управления;
на фиг. 2 - общий вид рулевого механизма;
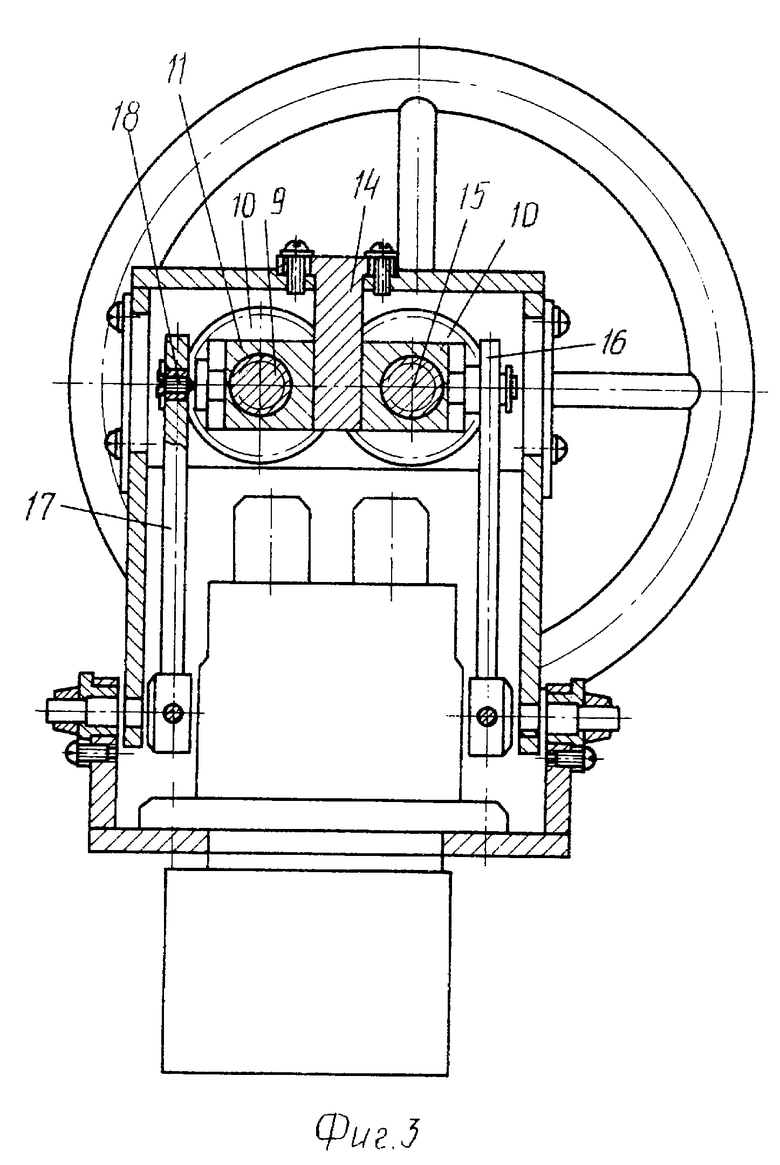
на фиг. 3 - вид сбоку;
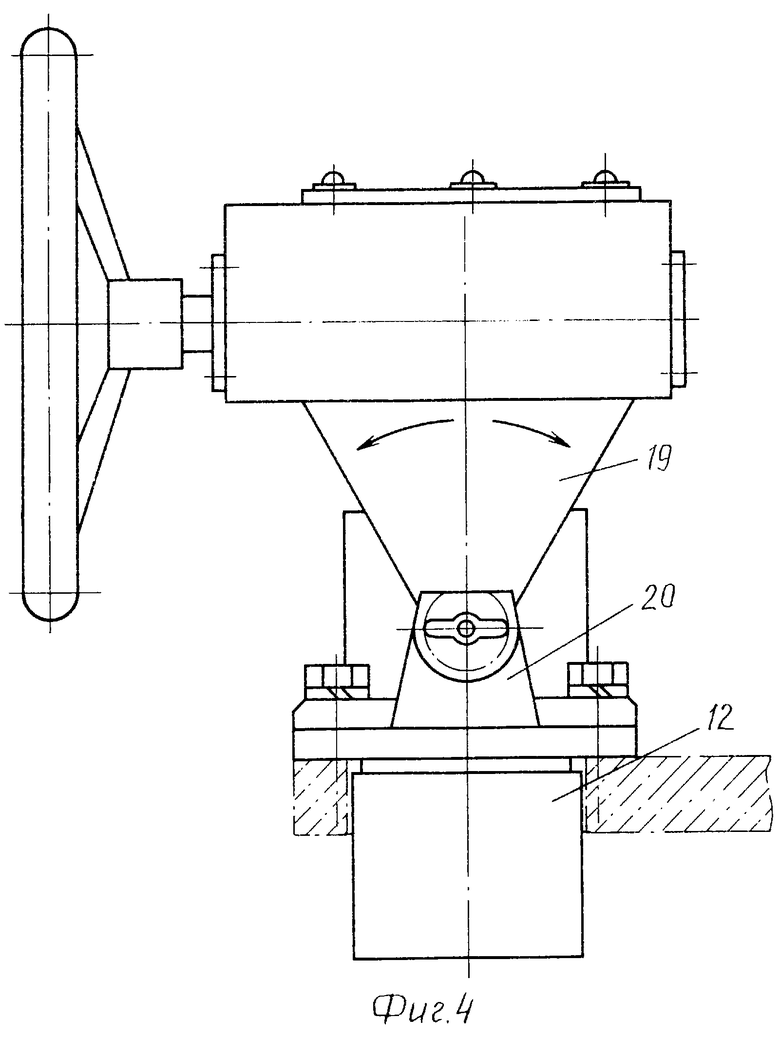
на фиг. 4, 5 - варианты крепления механизма.
Система управления состоит из двух насосов переменной производительности 1 и 2 и гидромоторов 3 и 4, образующих с гидронасосами два раздельных гидростатических привода, гусеничных движителей 5 и 6, в которые встроены гидромоторы и рулевой механизм управления 7, состоящий из рулевого колеса 8, валиков 9 и 15, двух шестерен 10, установленных на этих валиках и находящихся в зацеплении, двух гаек 11, установленных на резьбовых участка валиков 9 и 15 и связанных посредством 2-х пальцев 18 с рычагами 16 и 17, управляющими двумя гидрораспределителями блока управления 12.
Рулевой механизм управления работает следующим образом: при повороте рулевого колеса 8 благодаря паре шестерен 10, находящихся в зацеплении, валы 9 и 15 вращаются в противоположные стороны и установленные на них гайки 11 вследствие взаимодействия с направляющей 14 движутся также в противоположные стороны, увлекая за собой через пальцы 18 рычаги включения 16 и 17 гидрораспределителей блока управления 12.
Гидромоторы и связанные с ними гусеничные движители движутся с разными скоростями и таким образом обеспечивают поворот машины.
Поступательное движение машины (см. фиг. 4) обеспечивается поворотом кронштейнов 20 с закрепленным на нем блоком управления 12 при неподвижном кронштейне 19, при этом рычаги управления 16 и 17 отклоняются на одинаковый угол, обеспечивая равенство скоростей поступательного движения правого и левого движителей.
В случае закрепления неподвижно кронштейна 20 с установленным на нем блоком управления 12 поступательное движение машины (фиг.5) обеспечивается поворотом кронштейна 19 с закрепленным на нем механизмом управления, при этом рычаги управления 16, 17 также отклоняются на одинаковый угол, обеспечивая равенство скоростей поступательного движения правого и левого движителей.
Поворот машины при этом обеспечивается вращением рулевого колеса 8 описанным выше образом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением по курсу двухгусеничной машины | 1986 |
|
SU1379145A1 |
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
| Система управления рабочим органом в горизонтальной плоскости двухгусеничной землеройной машины | 1985 |
|
SU1265266A1 |
| СПОСОБ ПОВОРОТА ДВИЖИТЕЛЯМИ И УСТРОЙСТВО РУЛЕВОЕ ТРАКТОРА | 2010 |
|
RU2430851C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2005 |
|
RU2297355C2 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2013275C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2012 |
|
RU2501700C1 |
| Система управления транспортным средством | 1990 |
|
SU1722926A1 |
| ВЕЗДЕХОД | 2014 |
|
RU2549300C1 |


Изобретение относится к дорожно-строительным машинам, а также может быть использовано в тракторах, кранах, самоходных шасси. Система управления содержит насосы переменной производительности, левый и правый гидромоторы привода хода и связанные с ними левый и правый гусеничные движители. Рулевой механизм выполнен со встроенным в него блоком управления, который состоит из двух гидравлических распределителей, соединенных линиями управления с насосами переменной производительности. При этом кронштейн рулевого механизма закреплен, а кронштейн блока управления установлен с возможностью поворота, либо наоборот. Техническим результатом является создание системы управления, обеспечивающей плавный поворот машины. 2 с.п.ф-лы, 5 ил.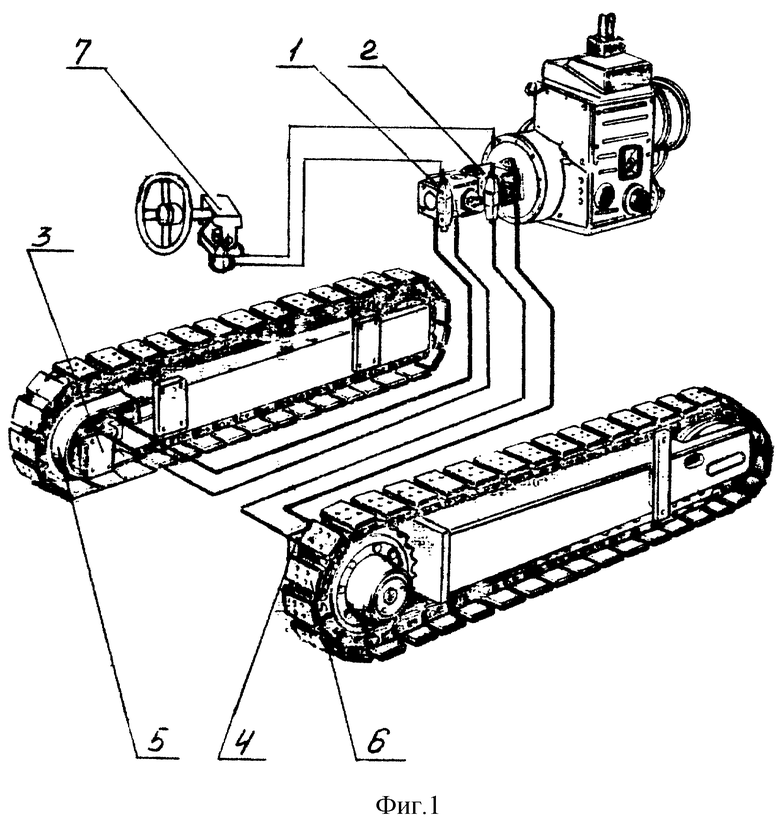
| Система управления движением по курсу двухгусеничной машины | 1986 |
|
SU1379145A1 |
| Механизм управления скоростью движения и поворотом двухмоторного гусеничного транспортного средства | 1980 |
|
SU931563A1 |
| Система управления бесступенчатым механизмом поворота транспортного средства | 1991 |
|
SU1789405A1 |
| Система управления поворотом гусеничной машины | 1991 |
|
SU1813669A1 |
| US 4936429 A, 26.06.1990 | |||
| Б.ИБЛИОГЕКА | 0 |
|
SU304594A1 |
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| US 4700794 A, 20.10.1987. | |||
